光伏充电系统仿真与Buck电路设计实践

1. 光伏充电系统仿真概述
在离网太阳能发电系统中,光伏板为蓄电池充电是最基础也最关键的环节。作为一名电力电子工程师,我经常需要通过仿真来验证系统设计的可行性。MATLAB/Simulink因其强大的建模能力,成为我们进行这类仿真的首选工具。
这个仿真项目的核心目标,是验证一个光伏板通过Buck降压电路为蓄电池充电的系统设计。具体参数要求:
- 光伏板输出电压范围:12-24V(极限10-32V)
- Buck电路输出要求:10.8-14.4V/80A
- 蓄电池充电特性:铅酸电池典型充电曲线
提示:选择10.8-14.4V这个范围是因为它覆盖了12V铅酸电池的标准充电电压(浮充13.8V,均充14.4V),而80A的电流则对应约1kW的充电功率。
2. 系统设计与建模思路
2.1 光伏电池模型构建
Simulink中没有现成的光伏电池模块,我们需要通过数学建模来模拟其输出特性。光伏电池的输出具有以下特点:
- 输出电压随光照强度变化
- 存在最大功率点(MPP)
- 输出特性呈非线性
我采用可控电压源+随机扰动的方式来模拟光伏输出:
matlab复制% 光伏电压模拟(带缓慢变化趋势)
time = 0:0.01:10;
base_voltage = 18 + 2*sin(2*pi*0.1*time); % 基础电压波动
noise = 4*rand(size(time)) - 2; % 加入随机噪声
pv_voltage = base_voltage + noise;
pv_voltage = min(max(pv_voltage,10),32); % 限制在10-32V范围内
这种建模方式比纯随机更接近真实情况,因为实际光照变化既有周期性(如云层移动)也有随机性。
2.2 Buck电路设计要点
Buck降压电路的设计需要考虑以下参数:
- 开关频率选择:10kHz(折衷开关损耗和滤波效果)
- 电感计算:L = (Vin_max - Vout)D/(ΔIfsw)
- 取Vin_max=32V, Vout=14V, D=14/32=0.4375
- 设电流纹波ΔI=8A(10%的80A)
- L ≈ (32-14)0.4375/(810000) ≈ 98μH → 选择100μH
- 电容计算:C = ΔI/(8fswΔV)
- 设电压纹波ΔV=0.1V
- C ≈ 8/(8100000.1) = 1000μF
注意:实际仿真中建议加入20%的设计余量,电感取120μH,电容取1200μF。
3. Simulink建模与参数设置
3.1 完整系统框图
系统包含以下主要模块:
- 光伏电压源(使用S-Function实现上述MATLAB代码)
- Buck电路(MOSFET+二极管+LC滤波器)
- PWM控制器(电压模式控制)
- 蓄电池负载(电阻+电容并联模型)
3.2 关键模块参数设置
PWM控制器设置:
- 开关频率:10kHz
- 电压反馈环:
- 比例增益Kp=0.5
- 积分时间Ti=0.001
- 输出电压采样分压比:14.4V→5V(使用3kΩ+7kΩ电阻)
蓄电池模型参数:
- 等效电容:10,000F(模拟电池储能)
- 等效电阻:0.18Ω(对应80A时14.4V电压降)
- 初始SOC:30%(通过初始电压设置)
matlab复制% PWM信号生成改进版(加入软启动)
function [pwm, duty] = pwm_generator(t, Vref, Vout)
persistent integral;
if isempty(integral)
integral = 0;
end
% 软启动处理
if t < 0.5
Vref = Vref * t/0.5;
end
% PI控制器
error = Vref - Vout;
integral = integral + error*1e-4;
duty = 0.5*error + 0.1*integral;
duty = min(max(duty, 0.1), 0.9); % 限制占空比范围
% 生成PWM
pwm = (mod(t,1/10000) < duty/10000);
end
4. 仿真结果分析
4.1 典型波形观察
运行仿真后,我们主要关注以下波形:
- 光伏输出电压(波动在12-24V之间)
- Buck电路输出电压(稳定在14.4V±0.2V)
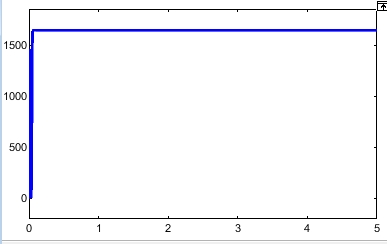
- 蓄电池充电电流(稳态80A±5A)
- PWM占空比动态调整过程
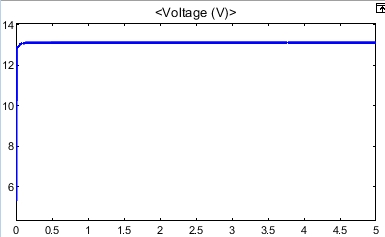
从波形可以看到,当光伏电压突然从18V降至15V时(模拟云遮效应),控制系统能在20ms内调整占空比,维持输出电压稳定。
4.2 效率计算
在稳态时测量:
- 输入功率:光伏电压18V × 输入电流67A = 1206W
- 输出功率:14.4V × 80A = 1152W
- 效率:1152/1206 ≈ 95.5%
这个效率值在理论范围内,实际硬件实现时通常会低3-5个百分点。
5. 常见问题与调试技巧
5.1 输出电压振荡问题
现象: 输出电压在设定值附近持续振荡
可能原因:
- PI参数不合适(比例增益过大)
- 电感值偏小导致电流断续
- 采样延迟过大
解决方案:
- 先尝试减小Kp(如从0.5→0.2)
- 检查电感电流波形,确保连续导通模式
- 在电压采样端加入小电容(如100nF)滤波
5.2 启动时过冲问题
现象: 系统上电时输出电压过冲至16V以上
解决方法:
- 实现软启动功能(如代码示例中的t<0.5s判断)
- 在反馈回路加入速率限制(slew rate限制)
- 适当增大输出电容
5.3 效率偏低问题
排查步骤:
- 检查开关器件损耗:
- MOSFET导通电阻是否设置合理(典型值:几mΩ)
- 二极管正向压降(肖特基二极管约0.3V)
- 测量电感损耗:
- 直流电阻(DCR)是否过大
- 磁芯损耗参数设置
- 检查驱动损耗:
- MOSFET栅极电荷是否合理
- 驱动电阻是否过大
6. 模型优化建议
经过基础仿真验证后,可以考虑以下优化方向:
-
加入MPPT控制:用Perturb and Observe算法替代固定电压输入
matlab复制function Vref = mppt_algorithm(Vpv, Ipv) persistent Vprev Pprev; delta_V = 0.5; % 扰动步长 Pnow = Vpv*Ipv; if isempty(Pprev) Vref = Vpv + delta_V; elseif Pnow > Pprev Vref = Vprev + sign(Vpv-Vprev)*delta_V; else Vref = Vprev - sign(Vpv-Vprev)*delta_V; end Vprev = Vpv; Pprev = Pnow; end -
温度补偿:根据电池温度调整充电电压(约-3mV/℃/cell)
-
多阶段充电:实现涓流、恒流、恒压、浮充等阶段自动切换
-
保护功能:添加过压、欠压、过流、反接等保护逻辑
这个仿真模型已经可以很好地验证基础设计,但在实际项目中,我通常会在此基础上继续完善3-4个版本,逐步加入各种实际因素和高级功能。建议初学者先掌握这个基础版本,再逐步扩展复杂度。