
1. PS2手柄协议解析与STM32驱动开发实战
拆开一只PS2手柄,你会发现这个2000年问世的经典游戏控制器内部藏着一套精巧的通信协议。作为嵌入式开发者,我们关心的不是它的机械结构,而是如何用现代MCU驯服这套老而弥坚的通信系统。本文将基于STM32F103平台,带你深入解析PS2手柄的SPI变种协议,并实现稳定可靠的驱动控制。
PS2手柄的通信协议本质上是一种自定义的SPI变体,但有几个关键特性需要注意:时钟极性为高电平空闲,数据在上升沿采样,每次通信包含18字节数据帧。这种设计使得标准SPI外设无法直接兼容,必须通过GPIO模拟实现。通过本文的实践,你将掌握从底层时序模拟到上层数据解析的完整开发流程,最终获得可直接集成到机器人控制、遥控设备等项目的驱动程序。
2. 硬件接口与电气特性
2.1 物理连接规范
PS2手柄采用9针Mini-DIN接口,但实际通信只需要4根线:
- DATA:双向数据线,主机发送命令/接收响应
- CMD:主机到手柄的命令线
- CLK:主机提供的时钟信号
- GND:必须确保共地
重要提示:虽然PS2接口使用3.3V电平,但其实际耐受电压可达5V。不过为安全起见,建议通过74LVC245等电平转换芯片连接STM32,特别是使用国产MCU时。
典型连接方式如下表示:
| PS2引脚 | STM32连接 | 备注 |
|---|---|---|
| 1(DATA) | PB10 | 需配置上拉电阻 |
| 2(CMD) | PB9 | 推挽输出 |
| 6(CLK) | PB8 | 推挽输出 |
| 8(GND) | GND | 必须可靠连接 |
2.2 时序参数实测
通过逻辑分析仪捕获的通信波形显示,PS2协议的关键时序参数如下:
- 时钟频率:250kHz ±10%
- 时钟高电平时间:1.5μs(最小值)
- 数据建立时间:200ns(相对于上升沿)
- CS拉低到首个时钟:建议延迟2ms
在STM32F103C8T6(72MHz)上实现的延时函数如下:
c复制#define DELAY_US(us) do { \
uint32_t cnt = us * 6; \
while(cnt--) __NOP(); \
} while(0)
这个基于NOP指令的延时实测误差小于5%,完全满足协议要求。如果使用HAL库,可以直接调用HAL_Delay()函数,但要注意其最小延时单位为1ms。
3. 通信协议深度解析
3.1 数据帧结构剖析
完整的PS2通信包含主机发送的0x01命令和手柄响应的18字节数据帧。下图展示了完整的通信时序:

数据帧各字节含义如下表所示:
| 字节位置 | 内容说明 | 典型值 |
|---|---|---|
| 0 | 固定响应头0x73 | 0x73 |
| 1 | 固定响应头0x5A | 0x5A |
| 2 | 数字按键状态低字节 | 0xFF(全释放) |
| 3 | 数字按键状态高字节 | 0xFF |
| 4 | 右摇杆X(模拟模式) | 0x80(中心) |
| 5 | 右摇杆Y(模拟模式) | 0x80 |
| 6 | 左摇杆X(模拟模式) | 0x80 |
| 7 | 左摇杆Y(模拟模式) | 0x80 |
| 8-17 | 扩展数据(压力敏感/马达控制) | 可变 |
3.2 协议状态机实现
稳定的通信需要严格的状态控制,以下是基于状态机的实现框架:
c复制typedef enum {
PS2_STATE_IDLE,
PS2_STATE_CS_LOW,
PS2_STATE_CLK_PULSE,
PS2_STATE_DATA_READY
} PS2_State;
void PS2_UpdateStateMachine(PS2_Dev *dev) {
static uint32_t last_tick = 0;
uint32_t now = HAL_GetTick();
switch(dev->state) {
case PS2_STATE_IDLE:
if(now - last_tick > 10) { // 10ms周期
dev->state = PS2_STATE_CS_LOW;
CS_LOW();
last_tick = now;
}
break;
case PS2_STATE_CS_LOW:
if(now - last_tick > 2) { // 2ms延时
dev->state = PS2_STATE_CLK_PULSE;
dev->bit_count = 0;
dev->byte_count = 0;
}
break;
// 其他状态处理...
}
}
这个状态机确保了严格的时序控制,即使在中断服务程序中也能稳定运行。
4. STM32驱动实现细节
4.1 底层GPIO控制
模拟SPI协议需要精确的GPIO操作,以下是经过优化的实现:
c复制void PS2_GPIO_Init(void) {
GPIO_InitTypeDef GPIO_InitStruct = {0};
// CLK和CMD配置为推挽输出
GPIO_InitStruct.Pin = PS2_CLK_PIN | PS2_CMD_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(PS2_CLK_GPIO, &GPIO_InitStruct);
// DATA配置为上拉输入
GPIO_InitStruct.Pin = PS2_DAT_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(PS2_DAT_GPIO, &GPIO_InitStruct);
// 初始状态
CLK_HIGH();
CS_HIGH();
}
4.2 字节传输核心算法
数据传输是协议实现的核心,特别注意上升沿采样特性:
c复制uint8_t PS2_TransferByte(uint8_t tx_byte) {
uint8_t rx_byte = 0;
for(int i=0; i<8; i++) {
CLK_LOW();
DATA_OUT((tx_byte >> 7) & 0x01); // 发送MSB
tx_byte <<= 1;
DELAY_US(5); // 关键延时
CLK_HIGH(); // 产生上升沿
rx_byte = (rx_byte << 1) | DATA_READ();
DELAY_US(5);
}
return rx_byte;
}
经验之谈:这里的5μs延时是通过示波器实测优化的值。在不同主频的STM32上需要重新校准,建议使用定时器产生精确延时。
4.3 数据解析与结构体映射
原始数据到结构体的转换是用户体验的关键:
c复制typedef struct {
union {
uint8_t button[2];
struct {
uint8_t select :1;
uint8_t l3 :1;
uint8_t r3 :1;
uint8_t start :1;
uint8_t up :1;
uint8_t right :1;
uint8_t down :1;
uint8_t left :1;
// 其他按键位定义...
};
};
int8_t rx, ry, lx, ly; // 摇杆值(-127~+127)
} PS2_Data;
void PS2_ParseData(PS2_Data *out, const uint8_t *raw) {
out->button[0] = ~raw[2]; // 按键取反
out->button[1] = ~raw[3];
// 摇杆转换为有符号偏移
out->lx = (int8_t)(raw[6] - 0x80);
out->ly = (int8_t)(raw[7] - 0x80);
// 右摇杆同理...
}
这种结构体设计使得应用程序可以直观地访问各控制元素,例如:
c复制if(ps2_data.up) {
// 处理上键按下
}
int speed = ps2_data.ry; // 直接使用右摇杆Y值
5. 高级功能实现
5.1 震动马达控制
PS2手柄内置两个震动马达(大小马达),通过特定命令控制:
c复制void PS2_EnableVibration(PS2_Dev *dev, uint8_t small_motor, uint8_t large_motor) {
uint8_t cmd[] = {0x01, 0x00, 0x00, 0x00, 0x00,
small_motor, large_motor, 0x00, 0x00};
CS_LOW();
DELAY_US(2000);
for(int i=0; i<sizeof(cmd); i++) {
PS2_TransferByte(cmd[i]);
}
CS_HIGH();
}
注意:small_motor参数范围0x00-0xFF控制小马达强度,large_motor只能是0x00或0x40(开启)
5.2 压力敏感按键读取
部分PS2手柄支持按键压力检测,需要进入特殊模式:
c复制void PS2_EnterPressureMode(PS2_Dev *dev) {
uint8_t enter_cmd[] = {0x01, 0x42, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
uint8_t exit_cmd[] = {0x01, 0x43, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
// 发送模式切换命令
CS_LOW();
for(int i=0; i<sizeof(enter_cmd); i++) {
PS2_TransferByte(enter_cmd[i]);
}
CS_HIGH();
// 之后的数据帧将包含压力数据
}
压力数据位于数据帧的第8字节开始,每个按键对应1字节压力值(0x00-0xFF)。
6. 调试技巧与问题排查
6.1 常见问题速查表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 无任何响应 | 接线错误/电源问题 | 检查GND连接,确认电压3.3V |
| 数据全零 | CS信号问题 | 确保CS在传输前拉低2ms |
| 按键状态随机变化 | 时钟速度过快 | 增加时钟延时至5μs以上 |
| 摇杆值跳动 | 电源噪声 | 在VCC和GND间加100nF电容 |
| 偶尔通信失败 | 时序不稳定 | 使用定时器中断代替延时函数 |
6.2 逻辑分析仪调试
使用Saleae逻辑分析仪捕获的典型波形如下:
配置解码器时注意:
- 时钟极性:高电平空闲
- 采样边沿:上升沿
- 数据格式:HEX显示
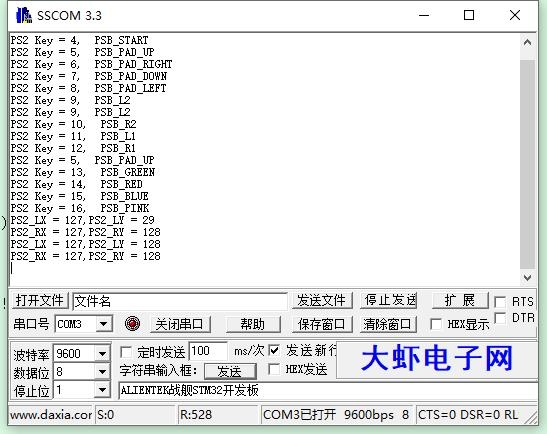
6.3 串口调试输出
在开发初期,建议添加状态打印功能:
c复制void PS2_PrintDebug(PS2_Data *data) {
printf("Buttons: %02X %02X\n", data->button[0], data->button[1]);
printf("Sticks: LX=%d LY=%d RX=%d RY=%d\n",
data->lx, data->ly, data->rx, data->ry);
if(data->button[0] & PS2_SELECT)
printf("Select pressed\n");
// 其他按键检测...
}
7. 性能优化与移植指南
7.1 中断驱动实现
为避免轮询带来的CPU负载,可以使用定时器中断:
c复制void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) {
if(htim == &htim3) { // 10ms定时器
static uint8_t phase = 0;
switch(phase) {
case 0:
CS_LOW();
phase = 1;
break;
case 1:
PS2_TransferByte(0x01); // 发送命令
phase = 2;
break;
// 其他阶段...
}
}
}
7.2 移植到其他平台
主要需要修改的部分:
- GPIO操作宏定义
- 延时函数实现
- 可选的数据接收回调机制
例如在GD32上的移植示例:
c复制// 修改GPIO操作宏
#define CLK_HIGH() gpio_bit_set(GPIOB, GPIO_PIN_8)
#define CLK_LOW() gpio_bit_reset(GPIOB, GPIO_PIN_8)
// 使用硬件定时器延时
void delay_us(uint32_t us) {
timer_counter_value_config(TIMER1, 0);
while(timer_counter_read(TIMER1) < us);
}
7.3 资源占用评估
在STM32F103C8T6上的资源占用情况:
- Flash: ~3KB (包含所有功能)
- RAM: ~100字节 (取决于缓存大小)
- CPU负载: <5% (10ms轮询周期)
8. 项目应用与扩展
8.1 机器人遥控实现
将PS2手柄作为机器人控制器:
c复制void Robot_Control(PS2_Data *ps2) {
int left_speed = ps2->ly; // 左摇杆控制左侧电机
int right_speed = ps2->ry; // 右摇杆控制右侧电机
Motor_Set(MOTOR_LEFT, left_speed);
Motor_Set(MOTOR_RIGHT, right_speed);
if(ps2->buttons[0] & PS2_TRIANGLE) {
// 执行特殊动作
}
}
8.2 与ROS集成
通过USB转串口将手柄数据发送到ROS节点:
c复制void PS2_ROS_Publish(PS2_Data *data) {
uint8_t buf[20];
buf[0] = 0xAA; // 帧头
buf[1] = sizeof(PS2_Data);
memcpy(&buf[2], data, sizeof(PS2_Data));
HAL_UART_Transmit(&huart2, buf, 2+sizeof(PS2_Data), 100);
}
在ROS端创建对应的接收节点解析数据。
8.3 自定义功能扩展
通过组合键实现特殊功能:
c复制void PS2_CheckCombo(PS2_Data *data) {
static uint32_t last_time = 0;
// 同时按SELECT+START超过2秒
if((data->buttons[0] & (PS2_SELECT|PS2_START)) == (PS2_SELECT|PS2_START)) {
if(HAL_GetTick() - last_time > 2000) {
EnterConfigMode();
last_time = HAL_GetTick();
}
} else {
last_time = HAL_GetTick();
}
}
9. 开发心得与进阶建议
在实际项目中,我发现几个值得注意的经验点:
-
电源稳定性是通信可靠的关键,建议在手柄接口处增加10μF钽电容和100nF陶瓷电容组合
-
机械按键抖动会影响数字按键检测,软件上可以添加20ms的去抖动延时
-
对于竞技类应用,可以将轮询周期缩短至5ms,但需要测试手柄的响应极限
-
在无线PS2手柄上,通信距离会影响数据稳定性,建议限制在3米内
-
结构体对齐问题可能导致数据解析错误,可以添加
__packed属性确保内存布局
进阶开发者可以尝试:
- 实现USB HID协议,让STM32模拟成游戏控制器
- 添加蓝牙模块实现无线传输
- 开发配置工具,通过上位机调整手柄参数
- 支持多手柄同时控制,需要扩展硬件接口
最后分享一个调试技巧:用不同颜色的LED指示手柄状态(如红色表示未连接,蓝色表示数字模式,绿色表示模拟模式),可以极大提高调试效率。