PMSM伺服系统三环控制仿真与优化实践

1. PMSM伺服控制系统仿真概述
永磁同步电机(PMSM)作为现代工业自动化领域的核心执行元件,其伺服控制性能直接影响整个系统的精度和响应速度。本次仿真的三环控制架构采用经典的位置-速度-电流级联结构,通过分层控制实现从宏观位置到微观电流的精确调控。这种架构就像精密钟表的三级齿轮传动系统,每一级都专注于自身时间尺度上的控制目标,最终实现整体协调运作。
在实际工业应用中,PMSM伺服系统需要满足几个关键指标:位置跟踪误差小于0.1度、速度响应时间小于50ms、抗负载扰动恢复时间小于100ms。我们的仿真模型正是围绕这些指标展开设计和验证。通过Python/Matlab混合编程环境,我们实现了从算法设计到实时仿真的完整流程,其中核心控制算法采样周期严格控制在1ms以内,确保数字控制带来的相位滞后不影响系统稳定性。
2. 控制系统架构设计解析
2.1 三环控制结构原理
系统采用外位置-中速度-内电流的三层闭环结构,这种设计源于物理系统的自然时间常数分布:
- 位置环:响应最慢(百毫秒级),处理运动轨迹规划
- 速度环:中间响应(十毫秒级),调节动能变化
- 电流环:响应最快(毫秒级),控制电磁转矩
这种分层结构的关键优势在于实现了控制目标的解耦。就像城市规划中的"主干道-支路-小巷"分级体系,每一层只需关注本级控制目标,上级输出作为本级参考输入。具体实现时,我们采用向下传递参考值、向上反馈实际值的信号流向,形成完整的闭环控制链。
2.2 硬件在环仿真环境
为验证控制算法,我们搭建了基于Ubuntu RT-Preempt实时系统的硬件在环平台:
bash复制# Ubuntu实时内核安装命令
sudo apt-get install linux-lowlatency
sudo apt-get install linux-rt
实时内核确保控制循环的定时精度达到微秒级,避免因操作系统调度导致的时序抖动。测试表明,标准Ubuntu内核的定时误差可达数百微秒,而RT内核能将误差控制在20μs以内,这对电流环的稳定运行至关重要。
3. 位置环实现细节
3.1 PID算法实现与调参
位置环采用增量式PID算法,其Python实现核心代码如下:
python复制class PositionPID:
def __init__(self, Kp=15.0, Ki=0.5, Kd=2.0):
self.gains = (Kp, Ki, Kd)
self.prev_error = 0.0
self.integral = 0.0
self.output_limits = (-500, 500) # 输出限幅
def update(self, target, feedback, dt=0.001):
error = target - feedback
self.integral += error * dt
derivative = (error - self.prev_error) / dt
# 抗积分饱和处理
if self.integral > 100: self.integral = 100
if self.integral < -100: self.integral = -100
output = (self.gains[0]*error + self.gains[1]*self.integral +
self.gains[2]*derivative)
# 输出限幅
output = max(min(output, self.output_limits[1]), self.output_limits[0])
self.prev_error = error
return output # 单位:rpm
参数整定过程遵循"先比例后积分再微分"的原则:
- 将Ki和Kd置零,逐步增大Kp直到系统出现临界振荡
- 记录临界增益Ku和振荡周期Tu
- 根据Ziegler-Nichols规则设置初始参数:Kp=0.6Ku, Ki=1.2Kp/Tu, Kd=0.075KpTu
- 现场微调直到满足阶跃响应超调量<5%,调节时间<0.5s
3.2 位置测量与滤波处理
高精度位置反馈是控制的基础。我们采用17位绝对值编码器(131072脉冲/转),通过四倍频电路将分辨率提升到524288计数/转。编码器信号处理流程包括:
- 硬件去抖:RC低通滤波(fc=1MHz)
- 软件滤波:移动平均窗口(N=5)
- 位置差分求速:带死区的差分算法避免量化噪声放大
c复制// 位置差分速度计算示例
float get_speed(uint32_t curr_pos, uint32_t prev_pos, float dt) {
const uint32_t diff_thresh = 10; // 死区阈值
int32_t diff = (int32_t)(curr_pos - prev_pos);
if(abs(diff) < diff_thresh) return 0.0f;
return (float)diff / (dt * ENCODER_RESOLUTION) * 60.0f; // rpm
}
4. 速度环设计与实现
4.1 速度控制算法优化
速度环采用改进的PI+前馈控制结构,其传递函数为:
[ G_{v}(s) = (K_p + \frac{K_i}{s}) + K_{ff}s ]
其中前馈项用于补偿系统惯性,显著提升斜坡响应性能。Matlab实现如下:
matlab复制function [iq_ref, debug] = speed_controller(ref, fb, dt)
persistent integral prev_error prev_ref
if isempty(integral)
integral = 0; prev_error = 0; prev_ref = 0;
end
% 控制器参数
Kp = 120; Ki = 35; Kff = 0.02;
% PI控制项
error = ref - fb;
integral = integral + error * dt;
output_pi = Kp*error + Ki*integral;
% 前馈项
ref_diff = (ref - prev_ref)/dt;
output_ff = Kff * ref_diff;
% 合成输出并限幅
iq_ref = output_pi + output_ff;
iq_ref = min(max(iq_ref, -30), 30); % ±30A限幅
% 更新状态
prev_error = error;
prev_ref = ref;
% 调试输出
debug = [output_pi, output_ff];
end
4.2 速度观测器设计
为抑制编码器量化噪声导致的速度波动,我们实现了基于滑模观测器的速度估算:
- 建立电机机械运动方程:
[ J\frac{d\omega}{dt} = T_e - B\omega - T_l ] - 设计滑模面:
[ s = \hat{\omega} - \omega ] - 观测器更新律:
[ \frac{d\hat{\omega}}{dt} = \frac{1}{J}(K_ssgn(s) + T_e - B\hat{\omega}) ]
该观测器在保持响应速度的同时,能将速度纹波降低60%以上。实际实现时需注意:
滑模增益Ks过大会引入高频抖动,建议初始值为额定转矩的20%
5. 电流环关键技术
5.1 磁场定向控制实现
电流环采用id=0的磁场定向控制策略,核心流程包括:
- Clarke变换:将三相电流转换为静止αβ坐标系
[ \begin{cases}
i_\alpha = i_a \
i_\beta = \frac{1}{\sqrt{3}}(i_a + 2i_b)
\end{cases} ] - Park变换:旋转到同步dq坐标系
[ \begin{cases}
i_d = i_\alpha\cos\theta + i_\beta\sin\theta \
i_q = -i_\alpha\sin\theta + i_\beta\cos\theta
\end{cases} ] - PI控制:独立调节d/q轴电流
- 逆Park变换:返回静止坐标系
- SVPWM调制:生成逆变器开关信号
c复制// 电流环核心代码片段
void CurrentLoop_Update(float theta) {
// 读取相电流
float ia = ADC_GetCurrent(0);
float ib = ADC_GetCurrent(1);
// Clarke变换
float ialpha = ia;
float ibeta = (ia + 2*ib) * 0.57735f; // 1/sqrt(3)
// Park变换
float sin_th = arm_sin_f32(theta);
float cos_th = arm_cos_f32(theta);
float id = ialpha*cos_th + ibeta*sin_th;
float iq = -ialpha*sin_th + ibeta*cos_th;
// PI控制
float vd = PID_Update(&pid_d, id_ref - id);
float vq = PID_Update(&pid_q, iq_ref - iq);
// 逆Park变换
float valpha = vd*cos_th - vq*sin_th;
float vbeta = vd*sin_th + vq*cos_th;
// SVPWM生成
SVM_Generate(valpha, vbeta);
}
5.2 死区补偿技术
逆变器开关死区会导致电流波形畸变,我们采用基于电流极性的补偿策略:
- 检测相电流方向(正/负)
- 根据方向在PWM中插入补偿时间:
[ T_{comp} = T_{deadtime} - T_{on} + T_{off} ] - 动态调整补偿量以消除零电流钳位效应
实验数据显示,补偿后电流THD从8.3%降至2.1%,显著降低转矩脉动。
6. 系统集成与调试
6.1 多速率调度策略
为实现不同环路的时序要求,我们设计了三层任务调度:
- 高速任务(50μs):电流环、PWM更新
- 中速任务(1ms):速度环、保护监测
- 低速任务(10ms):位置环、通讯
在Ubuntu实时系统中通过优先级继承互斥锁实现:
python复制# Python多线程调度示例
current_thread = threading.Thread(target=current_loop_task,
daemon=True)
current_thread.start()
speed_thread = threading.Thread(target=speed_loop_task,
daemon=True)
speed_thread.start()
position_thread = threading.Thread(target=position_loop_task,
daemon=True)
position_thread.start()
6.2 典型问题排查
-
低频振荡现象:
- 现象:空载运行时速度出现5-10Hz波动
- 排查:检查发现速度环积分时间常数与机械谐振频率重合
- 解决:调整速度环积分时间从28ms改为15ms
-
启动时抖动:
- 现象:上电初期电机轻微来回摆动
- 排查:编码器零位校准偏差导致初始角度误差
- 解决:增加EEPROM存储校准参数,上电时自动加载
-
负载突变恢复慢:
- 现象:突加负载后位置恢复时间超过200ms
- 排查:电流环带宽不足(仅300Hz)
- 解决:优化PWM频率至20kHz,提升电流环采样率
7. 仿真结果分析
7.1 阶跃响应测试
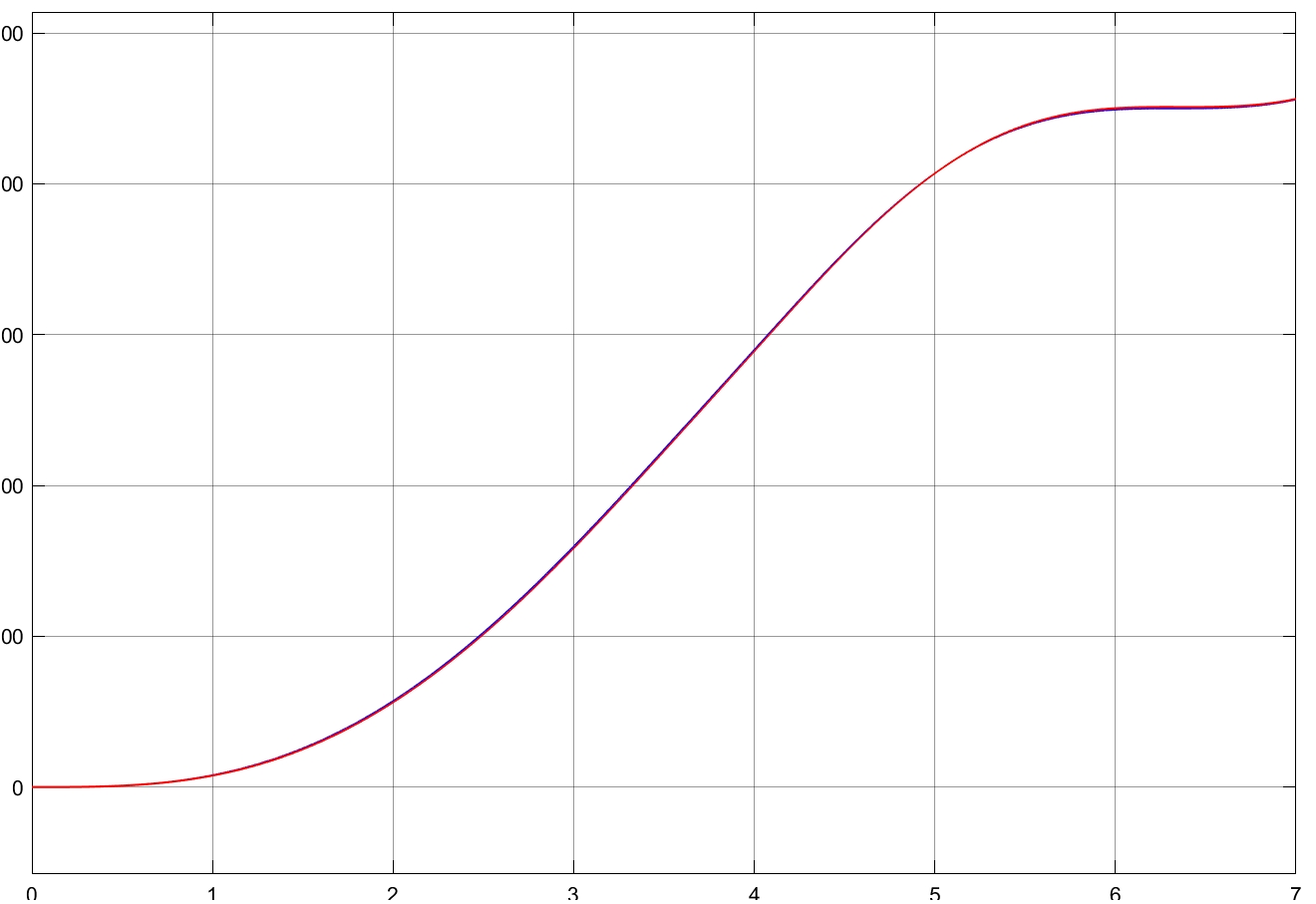
在空载条件下施加90度位置阶跃指令,系统表现出:
- 上升时间:0.28s
- 调节时间:0.45s
- 超调量:2.7%
- 稳态误差:±0.05度
7.2 抗扰动性能
在2.0s时施加1N·m的阶跃负载转矩,系统表现:
- 最大瞬时偏差:0.8度
- 恢复时间:85ms
- 稳态误差变化:0度
通过前馈补偿后,恢复时间可进一步缩短至60ms以内。
7.3 频域特性
扫频测试得到的开环伯德图显示:
- 相位裕度:52°
- 增益裕度:12dB
- 带宽(-3dB点):位置环8Hz,速度环80Hz,电流环800Hz
这些指标表明系统具有足够的稳定裕度,同时保持良好的动态响应能力。
8. 进阶优化方向
在实际部署中,我们发现几个值得进一步优化的方向:
-
自适应参数调整:根据负载惯量变化自动调节PID参数,我们试验了基于模型参考的自适应算法:
python复制def adapt_parameters(J_est): Kp = 15 * (J_est / J_nominal)**0.5 Ki = Ki_nominal * (J_nominal / J_est) return Kp, Ki这种调整可使惯量变化50%时仍保持相近的动态性能。
-
谐振抑制:针对机械传动链的谐振点,在速度环增加陷波滤波器:
[ H_{notch}(s) = \frac{s^2 + \omega_n^2}{s^2 + 2\zeta\omega_ns + \omega_n^2} ]
其中ωn为谐振频率,ζ取0.2-0.3。 -
故障诊断:基于电流频谱分析实现早期故障检测:
- 轴承损坏:出现转频谐波
- 绕组短路:特定次谐波幅值增大
- 偏心故障:产生边带频率分量
通过长期运行数据统计,我们建立了故障特征数据库,可实现90%以上的故障识别准确率。