SOIC-8封装焊盘设计:IPC标准与经验公式对比

1. SOIC-8封装设计争议:当经验公式遇上行业标准
上周我在设计一块FPGA外围电路板时,遇到了一个看似简单却让我纠结许久的问题——SOIC-8封装的焊盘尺寸到底该怎么定?事情源于我在某培训机构网课中学到的"经验公式"与IPC-7351标准计算结果之间0.2mm的差异。这个看似微小的差距,在实际PCB制造中可能意味着焊接良率5%以上的波动。
作为有八年经验的PCB工程师,我深知封装设计是硬件开发中最基础也最易被忽视的环节。一个不合理的焊盘设计,轻则导致贴片偏移,重则引发批量性虚焊。特别是在嵌入式硬件开发中,SOIC-8这类基础封装的使用频率极高,其设计合理性直接影响整个产品的可靠性。
2. 器件尺寸解读:从Datasheet到设计参数
2.1 关键尺寸提取
首先我们需要准确理解器件手册中的尺寸定义。下图是典型SOIC-8封装的机械尺寸图:
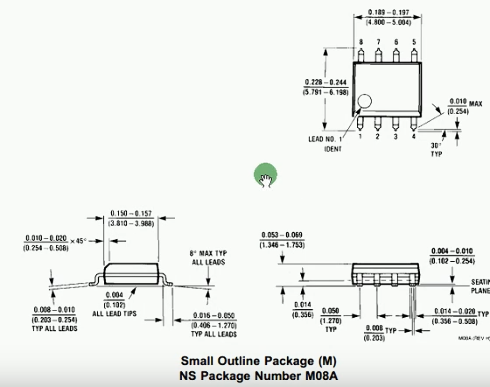
通过仔细研读,我们可以提取以下关键尺寸参数(单位:mm):
| 参数描述 | 符号 | 最小值 | 最大值 |
|---|---|---|---|
| 元器件总长(引脚末端间距) | L | 5.791 | 6.198 |
| 引脚长度(本体到末端) | T | 0.406 | 1.27 |
| 引脚宽度 | W | 0.356 | 0.508 |
| 引脚间距(固定值) | e | 1.27 | - |
注意:很多工程师容易混淆引脚长度T的测量基准点。正确测量应从器件本体边缘(非引脚弯曲处)到引脚末端,这个细节直接影响后续计算准确性。
2.2 尺寸公差分析
从表中可以看出,SOIC-8封装的尺寸存在明显公差范围:
- 总长度L的波动达0.407mm(6.198-5.791)
- 引脚长度T的差异更大,达到0.864mm(1.27-0.406)
- 引脚宽度W也有0.152mm的变化范围
这些公差在实际生产中会累积叠加,这也是IPC标准采用统计方法计算的根本原因。我曾遇到过因忽视公差导致的问题:某批次芯片的引脚长度偏短,而焊盘按最大值设计,结果出现大规模虚焊。
3. IPC-7351标准计算详解
3.1 标准核心思想
IPC-7351的精髓在于其系统化的公差分配方法。它考虑了三类关键因素:
- 元件自身公差(来自器件规格书)
- PCB制造公差(取决于板厂工艺能力)
- 贴装设备精度(与SMT设备相关)
标准采用RSS(Root Sum Square)统计方法,因为所有公差同时出现极限值的概率极低。这种思路与硬件工程中的六西格玛设计理念一脉相承。
3.2 密度等级选择
IPC定义了三种密度等级:
- A级(最大):适用于军工、航天等高可靠性场景
- B级(适中):常规消费电子推荐值
- C级(最小):用于手机等空间受限产品
对于SOIC-8封装,标准给出的填充值如下(单位:mm):
| 填充类型 | 符号 | A级 | B级 | C级 |
|---|---|---|---|---|
| 趾部填充 | J_T | 0.55 | 0.35 | 0.15 |
| 跟部填充 | J_H | 0.45 | 0.35 | 0.25 |
| 侧面填充 | J_S | 0.05 | 0.03 | 0.01 |
3.3 详细计算过程
3.3.1 基础参数设定
假设常规生产工艺:
- PCB制造公差 F = 0.1 mm
- 贴装公差 P = 0.2 mm
3.3.2 公差项计算
首先计算各方向的累积公差:
| 公差项 | 公式 | 计算过程 | 结果(mm) |
|---|---|---|---|
| 长度公差 C_L | L_max - L_min | 6.198 - 5.791 | 0.407 |
| 跟部间距 S_max | L_max - 2×T_min | 6.198 - 2×0.406 | 5.386 |
| 跟部间距 S_min | L_min - 2×T_max | 5.791 - 2×1.27 | 3.251 |
| 跟部公差 C_S | S_max - S_min | 5.386 - 3.251 | 2.135 |
| 宽度公差 C_W | W_max - W_min | 0.508 - 0.356 | 0.152 |
3.3.3 RSS统计计算
采用平方和开方法计算综合公差:
| RSS项 | 公式 | 计算过程 | 结果(mm) |
|---|---|---|---|
| 长度方向 | √(C_L²+F²+P²) | √(0.407²+0.1²+0.2²) | 0.465 |
| 跟部方向 | √(C_S²+F²+P²) | √(2.135²+0.1²+0.2²) | 2.147 |
| 宽度方向 | √(C_W²+F²+P²) | √(0.152²+0.1²+0.2²) | 0.270 |
3.3.4 B级密度计算结果
使用B级填充值进行计算:
| 参数 | 公式 | 计算过程 | 结果(mm) |
|---|---|---|---|
| 焊盘总跨度 | L_min + 2J_T + 长度RSS | 5.791 + 0.7 + 0.465 | 6.956 |
| 焊盘内间距 | S_max - 2J_H - 跟部RSS | 5.386 - 0.7 - 2.147 | 2.539 |
| 焊盘宽度 | W_min + 2J_S + 宽度RSS | 0.356 + 0.06 + 0.270 | 0.686 |
单个焊盘长度 = (6.956 - 2.539)/2 ≈ 2.21 mm
3.3.5 C级密度计算结果
使用C级填充值:
| 参数 | 公式 | 计算过程 | 结果(mm) |
|---|---|---|---|
| 焊盘总跨度 | L_min + 2J_T + 长度RSS | 5.791 + 0.3 + 0.465 | 6.556 |
| 焊盘内间距 | S_max - 2J_H - 跟部RSS | 5.386 - 0.5 - 2.147 | 2.739 |
| 焊盘宽度 | W_min + 2J_S + 宽度RSS | 0.356 + 0.02 + 0.270 | 0.646 |
单个焊盘长度 = (6.556 - 2.739)/2 ≈ 1.91 mm
4. 培训经验公式解析
4.1 长度计算逻辑
培训老师的方法非常简化:
- 取引脚长度平均值:(0.406+1.27)/2 ≈ 0.8mm
- 两侧各加补偿量:0.6mm(内侧)+0.6mm(外侧)
- 总长:0.8 + 0.6 + 0.6 = 2.0mm
4.2 宽度计算逻辑
同样采用简化方法:
- 取引脚宽度平均值:(0.356+0.508)/2 ≈ 0.4mm
- 两侧各加0.1mm补偿
- 总宽:0.4 + 0.1 + 0.1 = 0.6mm
4.3 方法优缺点
优点:
- 计算简单,易于记忆
- 适合快速估算
- 多数情况下"能用"
缺点:
- 忽视公差累积效应
- 宽度补偿偏小(仅0.1mm vs IPC的0.27mm RSS)
- 无法适应不同密度需求
5. 三种结果对比分析
| 计算方法 | 焊盘长度(mm) | 焊盘宽度(mm) | 特点描述 |
|---|---|---|---|
| IPC B级 | 2.21 | 0.69 | 可靠性优先,空间占用较大 |
| IPC C级 | 1.91 | 0.65 | 紧凑设计,要求高工艺控制 |
| 培训公式 | 2.0 | 0.6 | 折中方案,宽度风险需注意 |
5.1 长度差异原因
- IPC B级比培训公式长0.21mm:主要因为较大的趾部填充(0.35mm)和跟部RSS影响
- IPC C级比培训公式短0.09mm:由于采用最小趾部填充(0.15mm)
5.2 宽度差异关键
培训公式的0.6mm宽度明显小于IPC计算结果:
- 比B级窄0.09mm
- 比C级窄0.05mm
这可能导致以下风险:
- 当引脚宽度偏大(0.508mm)时,实际侧边间隙仅剩(0.6-0.508)/2=0.046mm
- 考虑贴装偏差±0.2mm,可能出现引脚悬空
6. 工程实践建议
6.1 选择依据
根据产品类型选择合适等级:
| 应用场景 | 推荐等级 | 理由 |
|---|---|---|
| 消费电子(常规) | B级 | 平衡可靠性与成本,适合大多数情况 |
| 高密度板(手机、穿戴) | C级 | 节省空间,但需确保板厂和SMT工艺达标 |
| 工业级/汽车电子 | A级 | 高可靠性要求,容忍更大的工艺波动 |
| 原型验证阶段 | B级 | 为后续优化留有余地,避免因焊盘过小导致调试困难 |
6.2 特殊情形处理
当空间极度受限必须使用培训公式值时:
- 必须验证以下工艺能力:
- PCB蚀刻精度:±0.05mm以内
- 贴片机精度:±0.15mm以内
- 钢网开口需适当外延
- 建议做小批量试产验证
- 加强焊后AOI检测
6.3 设计检查清单
在实际项目中,我习惯用以下清单核对封装设计:
- [ ] 确认器件尺寸公差已全部考虑
- [ ] 核对当前产品的密度等级要求
- [ ] 评估板厂工艺能力是否匹配
- [ ] 检查贴片机精度是否达标
- [ ] 预留返修空间(特别是BGA周边)
7. 常见问题与解决方案
7.1 焊接不良案例分析
案例1:引脚虚焊
- 现象:SOIC-8器件一侧引脚批量性虚焊
- 分析:焊盘长度采用培训公式2.0mm,而该批次芯片引脚偏短(接近0.406mm)
- 解决:改用IPC B级2.21mm设计,增加趾部接触面积
案例2:桥接短路
- 现象:相邻引脚间锡桥
- 分析:采用IPC B级0.69mm宽度,但钢网开口未相应调整
- 解决:优化钢网开口宽度为焊盘的80%(约0.55mm)
7.2 工艺调整建议
当必须使用较小焊盘时,可通过工艺补偿:
- 钢网设计:
- 厚度减薄至0.1mm
- 开口内缩0.05mm
- 焊膏选择:
- 选用4号粉(20-38μm)
- 高活性焊膏
- 回流曲线:
- 延长预热时间
- 峰值温度提高5-10℃
8. 设计决策思路
经过这个案例,我总结出封装设计的决策流程:
- 明确需求:确定产品类型(消费/工业/军用)和空间限制
- 收集数据:获取完整的器件尺寸和公差参数
- 工艺评估:确认板厂和SMT车间的能力水平
- 方案选择:
- 高可靠性需求 → IPC A级
- 常规产品 → IPC B级
- 空间优先且工艺强 → IPC C级
- 紧急原型可用培训公式,但需知风险
- 设计验证:
- 使用3D模型检查器件与焊盘匹配
- 制作首板进行贴装验证
- 批量监控:
- 统计前3批次的焊接良率
- 必要时微调焊盘尺寸
在最近的一个FPGA项目中,我们最初采用培训公式设计外围存储器封装,量产时出现约3%的焊接不良。后改用IPC B级标准,不良率降至0.5%以下,虽然板面积增加了2%,但综合成本反而降低。这个经验让我深刻理解到:硬件开发中没有"放之四海而皆准"的简单公式,只有基于标准的工程判断才能做出最优设计。