STM32驱动MCP4017数字电位器与ADC采集实战

1. 项目概述
在嵌入式系统开发中,数字电位器和ADC采集是常见的硬件控制技术。MCP4017作为一款数字电位器芯片,通过I2C接口实现电阻值的数字化控制,配合ADC模块可以实现精确的电压采集和调节。这种组合在蓝桥杯等嵌入式竞赛中经常出现,也是工业控制、消费电子等领域的基础技能。
这个项目完整展示了如何通过STM32微控制器驱动MCP4017数字电位器,并利用ADC采集电压信号。我们将从硬件连接、工作原理到软件实现进行全面解析,特别关注实际开发中的关键细节和常见问题。
2. MCP4017数字电位器详解
2.1 数字电位器基础概念
传统电位器是机械式的可变电阻器,通过旋转或滑动改变电阻值。MCP4017将其数字化,实现了以下转变:
- 机械操作 → 数字控制:不再需要物理旋钮,通过I2C发送指令即可调节
- 连续调节 → 离散档位:提供128级精确调节(0-127)
- 模拟电路 → 数字接口:可直接与微控制器集成,实现自动化控制
典型应用场景包括:
- LED亮度调节
- 音频设备音量控制
- 传感器灵敏度调整
- 电源管理电路中的电压调节
2.2 MCP4017技术特性
MCP4017的主要参数如下:
| 特性 | 参数值 | 说明 |
|---|---|---|
| 电阻范围 | 0-100kΩ | 总阻值可调范围 |
| 分辨率 | 128级 | 调节精度,对应0-127 |
| 接口类型 | I2C | 标准两线制串行接口 |
| 工作电压 | 2.7V-5.5V | 宽电压范围兼容性 |
| 温度系数 | 800ppm/℃ | 温度稳定性指标 |
| 封装形式 | SOT-23-6 | 小型表贴封装 |
注意:实际使用中,电阻值并非完全线性变化。在低阻值区域(<10kΩ)时,调节精度会更高。
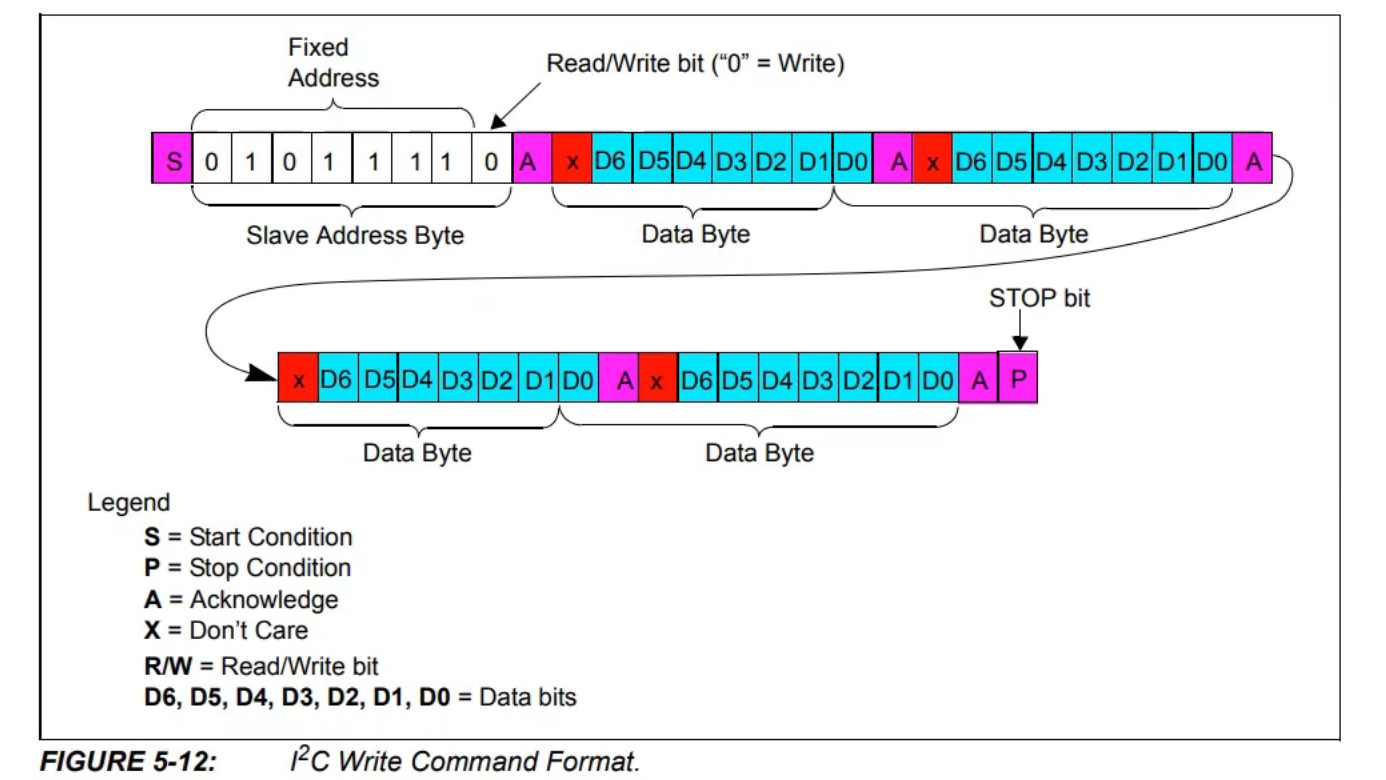
2.3 I2C通信协议实现
MCP4017采用标准I2C协议,硬件连接仅需两根线:
c复制// STM32硬件I2C初始化示例
I2C_HandleTypeDef hi2c1;
void MX_I2C1_Init(void)
{
hi2c1.Instance = I2C1;
hi2c1.Init.ClockSpeed = 100000; // 100kHz标准模式
hi2c1.Init.DutyCycle = I2C_DUTYCYCLE_2;
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
if (HAL_I2C_Init(&hi2c1) != HAL_OK)
{
Error_Handler();
}
}
实际写入数据的函数实现:
c复制#define MCP4017_ADDR 0x5E // 7位地址格式
void MCP4017_Write(uint8_t value)
{
// 确保值在有效范围内
value = value > 127 ? 127 : value;
HAL_I2C_Master_Transmit(&hi2c1, MCP4017_ADDR, &value, 1, HAL_MAX_DELAY);
}
3. 硬件电路设计
3.1 典型应用电路
MCP4017的标准连接方式如下图所示:
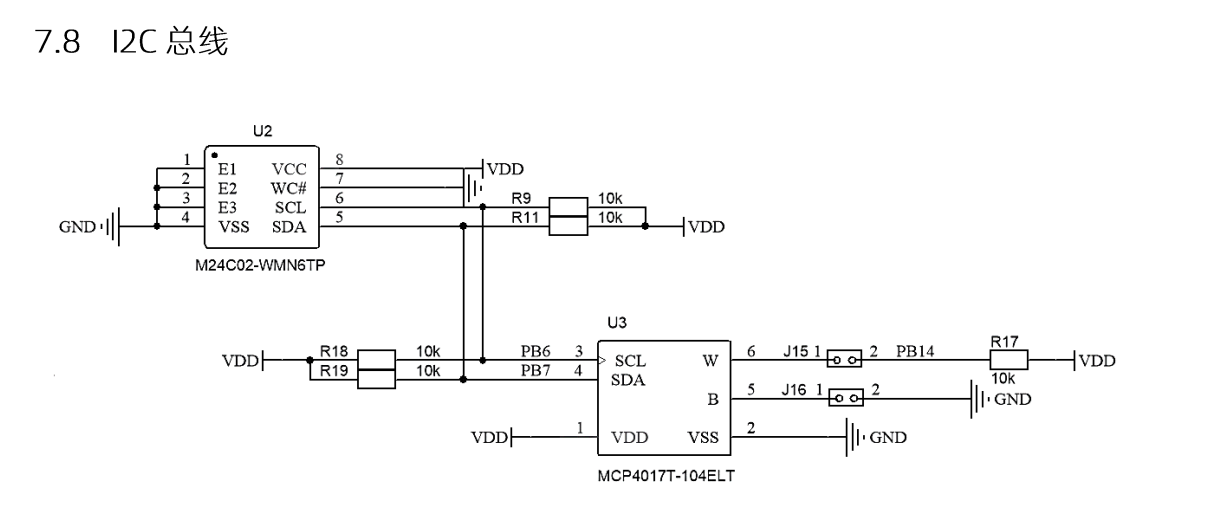
关键设计要点:
- 上拉电阻:SCL和SDA线需要4.7kΩ上拉电阻
- 电源滤波:VDD引脚应加0.1μF去耦电容
- 端子连接:
- VSS:接地
- A端子:接高电平或信号源
- W端子:可调输出端
- B端子:接地或参考电平
3.2 与ADC的配合设计
在蓝桥杯开发板上,典型配置如下:
电压分压计算公式:
code复制Vout = Vin * (R2 / (R1 + R2))
其中R2就是MCP4017的电阻值,通过调节其阻值可以改变分压比,ADC采集到的电压值也会相应变化。
4. 软件实现与优化
4.1 ADC采集处理
完整的ADC采集处理流程如下:
c复制// 定义全局变量
u32 adc_tick = 0;
float mcp_volt = 0;
void ADC_Process()
{
// 200ms采样周期控制
if(uwTick - adc_tick < 200) return;
adc_tick = uwTick;
// 启动ADC转换
HAL_ADC_Start(&hadc1);
while(HAL_ADC_PollForConversion(&hadc1, 10) != HAL_OK);
// 获取并转换ADC值
uint32_t adc_value = HAL_ADC_GetValue(&hadc1);
mcp_volt = 3.3f * adc_value / 4096.0f;
// 根据电压值调整MCP4017
uint8_t mcp_value = (uint8_t)(mcp_volt * 127 / 3.3);
MCP4017_Write(mcp_value);
}
4.2 按键控制实现
长按和短按的区分处理是关键难点:
c复制uint32_t key_long_tick = 0;
void Key_Process()
{
// 短按处理
if(key_down == 3) { // 按键3按下
mcp_num++;
if(mcp_num > 127) mcp_num = 127;
}
else if(key_down == 4) { // 按键4按下
mcp_num--;
if(mcp_num > 127) mcp_num = 0; // 注意:这里应该判断<0
}
// 长按检测
if((key_value == 3 || key_value == 4) &&
(uwTick - key_long_tick > 800))
{
if(key_value == 3) {
mcp_num++;
if(mcp_num > 127) mcp_num = 127;
}
else {
mcp_num--;
if(mcp_num > 127) mcp_num = 0; // 同样需要修正
}
}
// 更新长按计时
if(key_down == 3 || key_down == 4) {
key_long_tick = uwTick;
}
}
重要提示:代码中的
mcp_num > 127判断是错误的,应该是mcp_num < 0。这是嵌入式开发中常见的边界条件错误,需要特别注意。
5. 实际应用技巧
5.1 呼吸灯实现
利用MCP4017可以轻松实现PWM类似的呼吸灯效果:
c复制void Breath_LED()
{
// 渐亮
for(int i = 0; i < 128; i++) {
MCP4017_Write(i);
HAL_Delay(10);
}
// 渐暗
for(int i = 127; i >= 0; i--) {
MCP4017_Write(i);
HAL_Delay(10);
}
}
5.2 非阻塞延时优化
使用uwTick实现高效的非阻塞延时:
c复制uint32_t last_tick = 0;
void NonBlocking_Delay()
{
if(uwTick - last_tick < 1000) return;
last_tick = uwTick;
// 这里放置需要周期性执行的代码
ADC_Process();
}
这种方法相比HAL_Delay()的优势:
- 不阻塞主循环
- 精确控制执行周期
- 可同时管理多个不同周期的任务
6. 常见问题与调试技巧
6.1 I2C通信失败排查
当MCP4017无响应时,按以下步骤排查:
-
检查硬件连接
- 确认SCL/SDA线正确连接
- 测量上拉电阻是否正常(4.7kΩ)
- 检查电源电压(2.7-5.5V)
-
验证I2C信号
- 用示波器观察SCL/SDA波形
- 确认时钟频率符合设备要求
- 检查起始/停止条件是否正常
-
软件调试
- 确认I2C初始化参数正确
- 检查设备地址(MCP4017为0x5E)
- 添加错误处理代码:
c复制HAL_StatusTypeDef status = HAL_I2C_Master_Transmit(&hi2c1, MCP4017_ADDR, &value, 1, 100);
if(status != HAL_OK) {
printf("I2C传输失败,错误码:%d\n", status);
}
6.2 ADC采集异常处理
ADC采集值不稳定的可能原因及解决方案:
| 现象 | 可能原因 | 解决方法 |
|---|---|---|
| 值跳动大 | 电源噪声 | 增加滤波电容 |
| 值固定不变 | 通道配置错误 | 检查ADC初始化 |
| 值偏差大 | 参考电压不准 | 校准参考源 |
| 响应慢 | 采样时间短 | 增加采样周期 |
6.3 实际项目经验
-
电阻选择:
- 在分压电路中使用1%精度的金属膜电阻
- 避免使用阻值过大的电阻(>1MΩ),会引入噪声
-
PCB布局:
- I2C走线尽量短,避免平行走线
- 模拟和数字地分开布局
-
代码优化:
- 减少不必要的ADC启动次数
- 使用DMA传输提高效率
- 对ADC值进行软件滤波(如移动平均)
c复制// 简单的移动平均滤波实现
#define FILTER_SIZE 5
uint32_t adc_filter[FILTER_SIZE] = {0};
uint8_t filter_index = 0;
uint32_t ADC_Filter(uint32_t new_value)
{
adc_filter[filter_index] = new_value;
filter_index = (filter_index + 1) % FILTER_SIZE;
uint32_t sum = 0;
for(int i = 0; i < FILTER_SIZE; i++) {
sum += adc_filter[i];
}
return sum / FILTER_SIZE;
}
在嵌入式系统开发中,数字电位器和ADC的配合使用非常普遍。通过这个项目,我们不仅掌握了MCP4017的基本用法,还学习了如何优化代码结构、处理边界条件以及进行系统调试。这些技能在参加蓝桥杯等竞赛时尤为重要,也是实际工程开发中的基础能力。