
1. STM32定时器与PWM基础解析
在嵌入式开发领域,STM32的定时器堪称瑞士军刀般的存在。作为一名长期与STM32打交道的工程师,我发现很多初学者对定时器和PWM的关系存在误解。实际上,PWM只是定时器众多功能中的一种工作模式,而非独立外设。
定时器的本质是一个可编程的硬件计数器,它能够:
- 以精确的时间间隔进行计数
- 在达到特定阈值时触发事件
- 通过中断、DMA或引脚输出响应这些事件
PWM(脉宽调制)则是利用定时器的输出比较功能,通过调节脉冲的占空比来实现模拟量控制。这种技术在电机控制、LED调光、电源管理等场景中应用广泛。
2. 定时器核心架构剖析
2.1 定时器工作原理
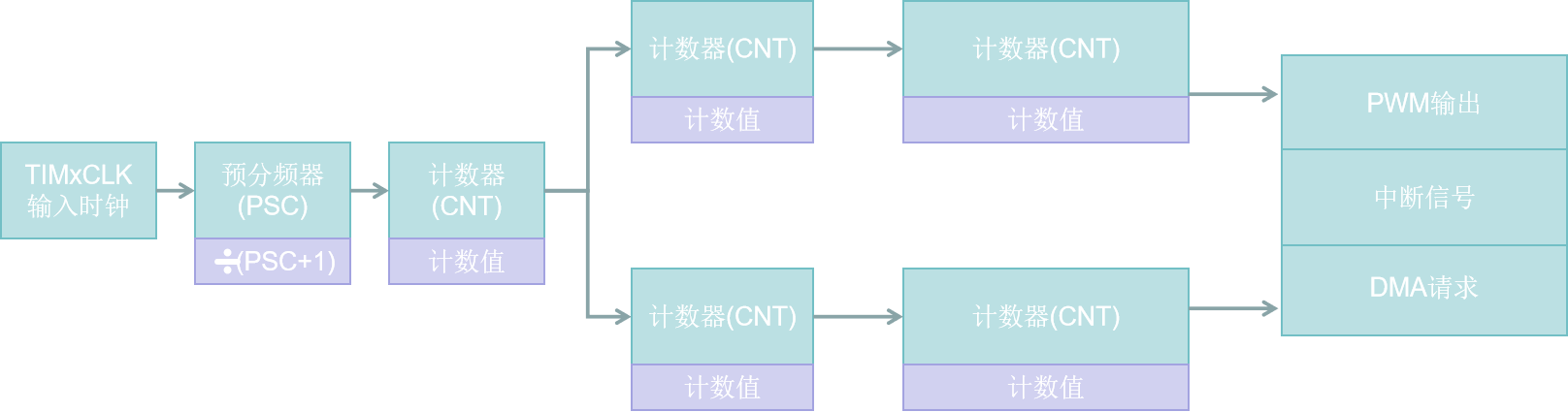
STM32定时器的核心是一条硬件计数流水线,其工作流程可以分解为以下几个关键环节:
- 时钟输入(TIMxCLK)
- 预分频处理(PSC)
- 计数器(CNT)
- 比较/周期判断(ARR/CCR)
- 事件生成(Update/Compare)
2.2 时钟源与分频机制
定时器的精度很大程度上取决于时钟源的质量。STM32的定时器时钟通常来自APB总线,但需要注意一个关键细节:当APB预分频系数不为1时,定时器时钟会自动倍频。这个特性经常导致初学者在计算频率时出现"差一倍"的错误。
3. PWM生成的关键参数
3.1 计数频率(f_cnt)
计数频率决定了定时器的最小时间分辨率,计算公式为:
code复制f_cnt = TIMxCLK / (PSC + 1)
其中:
- TIMxCLK:定时器输入时钟频率
- PSC:预分频器值(0-65535)
3.2 PWM频率(f_pwm)
PWM频率由自动重装载寄存器(ARR)决定,在边沿对齐模式下计算公式为:
code复制f_pwm = f_cnt / (ARR + 1)
3.3 占空比(D)
占空比通过比较寄存器(CCR)控制,计算公式为:
code复制D = CCR / (ARR + 1)
4. PWM模式详解
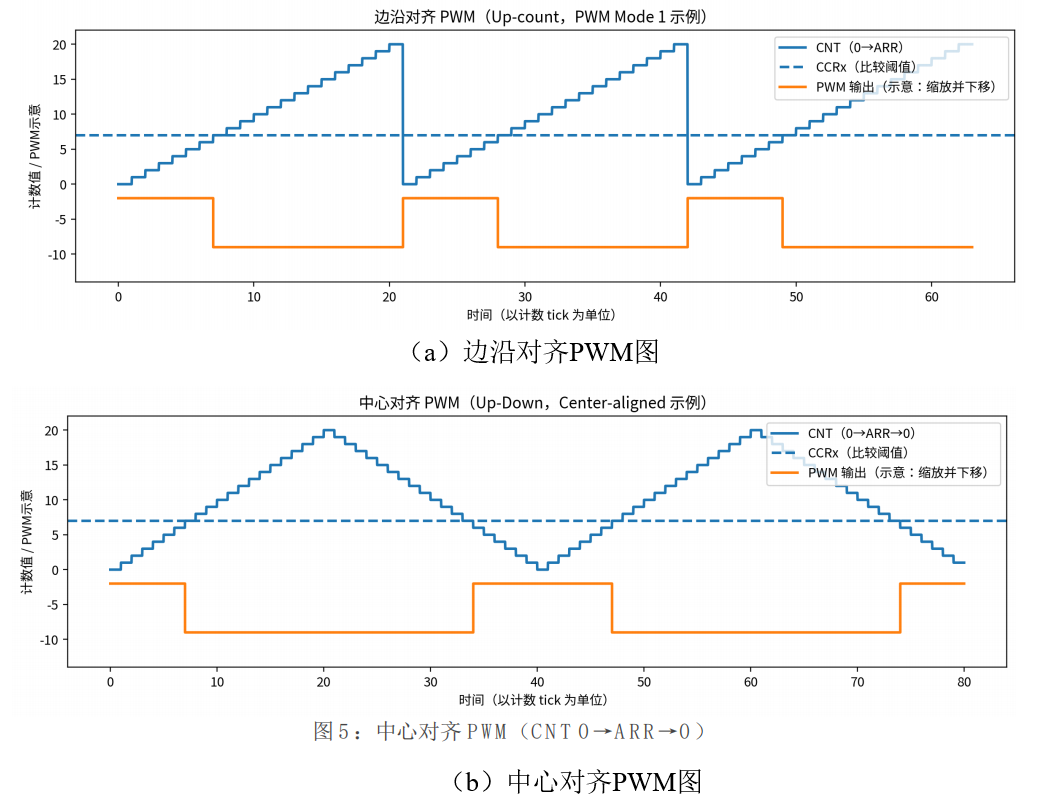
4.1 边沿对齐模式
边沿对齐是最常用的PWM模式,计数器从0递增到ARR,然后复位回0。这种模式下:
- 上升沿固定在周期开始时刻
- 下降沿由CCR值决定
- 实现简单,适用于大多数应用场景
4.2 中心对齐模式
中心对齐模式下,计数器先递增到ARR,再递减回0。这种模式的特点是:
- 脉冲中心始终对齐
- 开关切换时刻分散,EMI性能更好
- 特别适合电机驱动等大功率应用
5. 定时器配置实战
5.1 硬件初始化步骤
- 时钟配置:
c复制RCC->APB1ENR |= RCC_APB1ENR_TIM3EN; // 使能TIM3时钟
- GPIO设置:
c复制GPIOA->CRL &= ~(0xFU << (6 * 4)); // 清除PA6配置
GPIOA->CRL |= (0xBU << (6 * 4)); // 复用推挽输出
- 定时器参数计算:
c复制uint32_t period_ticks = timclk / fpwm_hz;
uint32_t psc = 0;
uint32_t arr = period_ticks - 1;
5.2 PWM通道配置
c复制TIM3->CCMR1 |= (6U << 4); // PWM模式1
TIM3->CCMR1 |= TIM_CCMR1_OC1PE; // 预装载使能
TIM3->CCER |= TIM_CCER_CC1E; // 使能通道输出
5.3 高级定时器注意事项
对于TIM1/TIM8等高级定时器,必须设置BDTR寄存器的MOE位:
c复制TIM1->BDTR |= TIM_BDTR_MOE; // 主输出使能
6. 实战经验与问题排查
6.1 常见问题解决方案
-
频率偏差问题:
- 检查APB分频设置
- 确认TIMxCLK计算是否正确
- 验证PSC和ARR值是否合理
-
PWM无输出:
- 确认GPIO复用功能已启用
- 检查CCxE位是否置位
- 高级定时器需设置MOE位
-
占空比调节异常:
- 确保OCxPE和ARPE使能
- 避免在周期中间修改CCR值
- 使用UG位强制更新
6.2 性能优化技巧
-
分辨率最大化:
- 尽量使用更大的ARR值
- 只在必要时增加PSC
-
动态调整策略:
- 使用预装载功能实现无毛刺更新
- 在Update事件时同步修改参数
-
低功耗考虑:
- 合理选择时钟源
- 不使用时可关闭定时器时钟
7. 代码实现详解
7.1 时钟计算函数
c复制uint32_t RCC_GetTIMxCLK_APB1_Hz(void) {
uint32_t pclk1 = RCC_GetPCLK1_Hz();
uint32_t ppre1 = (RCC->CFGR >> 8) & 0x7;
return (ppre1 < 4) ? pclk1 : pclk1 * 2;
}
7.2 PWM初始化函数
c复制void TIM3_CH1_PWM_Init_PA6(uint32_t fpwm_hz, uint16_t duty_permille) {
// 参数校验
if(fpwm_hz == 0 || duty_permille > 1000) return;
// 时钟配置
uint32_t timclk = RCC_GetTIMxCLK_APB1_Hz();
// GPIO初始化
RCC->APB2ENR |= RCC_APB2ENR_IOPAEN | RCC_APB2ENR_AFIOEN;
GPIOA->CRL = (GPIOA->CRL & ~(0xFU << 24)) | (0xBU << 24);
// 定时器配置
RCC->APB1ENR |= RCC_APB1ENR_TIM3EN;
TIM3->CR1 = TIM3->CR2 = TIM3->SMCR = TIM3->DIER = TIM3->CCER = 0;
// 计算PSC和ARR
uint32_t period_ticks = timclk / fpwm_hz;
uint32_t psc = 0, arr = period_ticks - 1;
if(period_ticks > 65536) {
psc = ((period_ticks + 65535) / 65536) - 1;
arr = (period_ticks / (psc + 1)) - 1;
}
TIM3->PSC = psc;
TIM3->ARR = arr;
// PWM配置
uint32_t ccr = (duty_permille * (arr + 1)) / 1000;
TIM3->CCR1 = ccr;
TIM3->CCMR1 = (6 << 4) | TIM_CCMR1_OC1PE;
TIM3->CCER = TIM_CCER_CC1E;
// 启动定时器
TIM3->CR1 |= TIM_CR1_ARPE;
TIM3->EGR = TIM_EGR_UG;
TIM3->CR1 |= TIM_CR1_CEN;
}
7.3 动态调整占空比
c复制void TIM3_CH1_PWM_SetDuty(uint16_t duty_permille) {
if(duty_permille > 1000) duty_permille = 1000;
uint32_t arr = TIM3->ARR;
uint32_t ccr = (duty_permille * (arr + 1)) / 1000;
TIM3->CCR1 = ccr;
}
8. 进阶应用与优化
8.1 高精度PWM实现
对于需要更高精度的应用,可以考虑:
- 使用32位定时器(如TIM2/TIM5)
- 选择更高频率的时钟源
- 采用硬件触发同步多个定时器
8.2 互补PWM输出
高级定时器支持互补PWM输出,适用于:
- 电机驱动H桥电路
- 电源半桥拓扑
- 需要死区时间控制的应用
配置要点:
c复制TIM1->CCER |= TIM_CCER_CC1NE; // 使能互补输出
TIM1->BDTR |= (0x10 << 8); // 设置死区时间
8.3 定时器级联
通过主从定时器配置,可以实现:
- 更长的定时周期
- 复杂的事件序列
- 精确的同步控制
配置示例:
c复制TIM2->CR2 |= TIM_CR2_MMS_1; // 主定时器更新事件作为触发输出
TIM3->SMCR |= TIM_SMCR_SMS_2; // 从定时器工作在触发模式
9. 调试技巧与工具
9.1 示波器测量要点
- 确认PWM频率与预期一致
- 检查占空比精度
- 观察上升/下降沿质量
- 验证死区时间(如适用)
9.2 调试接口使用
-
SWD/JTAG调试:
- 实时查看定时器寄存器
- 设置断点观察PWM生成过程
-
逻辑分析仪:
- 捕获长时间PWM波形
- 分析占空比动态变化
-
串口调试:
- 输出定时器配置参数
- 实时调整PWM参数
10. 实际项目经验分享
在最近的一个无人机电调项目中,我们充分利用了STM32定时器的PWM功能。通过中心对齐模式和互补输出,实现了对无刷电机的高效控制。项目中特别注意了以下几点:
-
死区时间设置:根据MOSFET的开关特性,精心调整了死区时间,既避免了直通现象,又保证了效率。
-
动态响应优化:使用预装载功能实现占空比的无缝切换,确保电机运行平稳。
-
同步采样:利用定时器触发ADC,在PWM周期的特定时刻进行电流采样,提高了控制精度。
这个项目的成功经验表明,深入理解STM32定时器的工作原理,能够帮助工程师设计出性能更优、可靠性更高的嵌入式系统。