
1. LLC半桥变换器控制策略全景解析
作为一名电源工程师,我花了整整三个月时间在实验室里折腾LLC半桥变换器的各种控制方法。记得有天凌晨三点,当我第七次修改ADRC参数时,突然意识到每种控制策略都像不同的武术流派——各有其适用场景和独门绝技。下面我就把这段时间的实战经验系统梳理出来,重点聚焦四种主流控制方式在仿真建模中的实现细节。
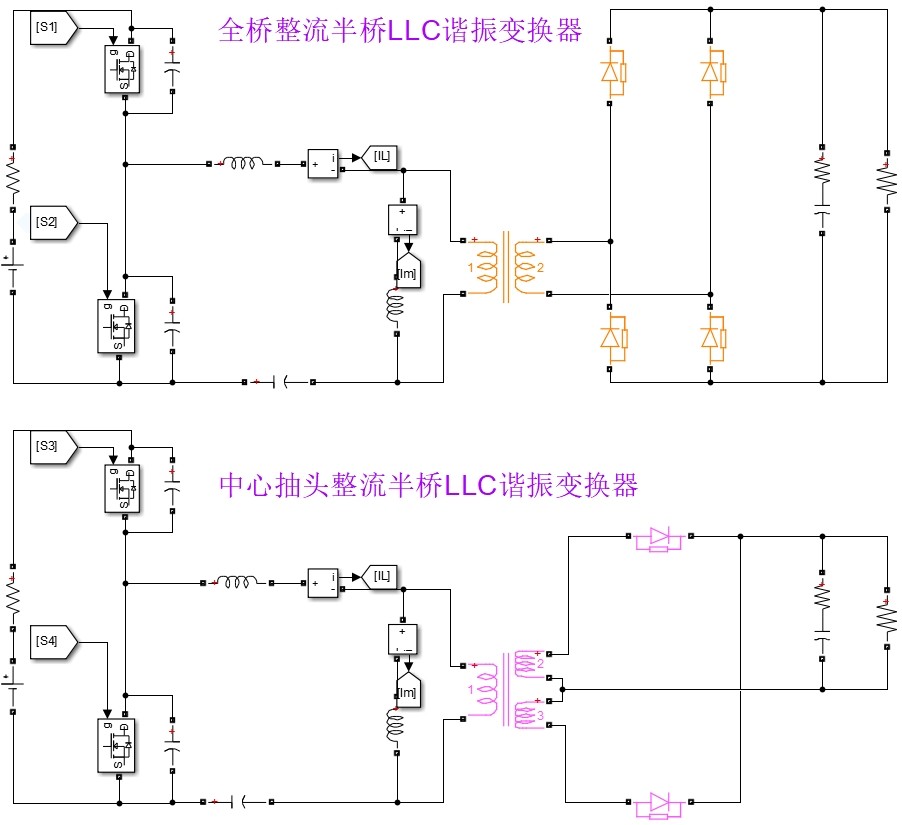
1.1 为什么选择LLC半桥拓扑
LLC谐振变换器因其软开关特性,在高效电源设计中占据重要地位。其核心优势在于:
- 全负载范围内实现ZVS(零电压开关)
- 利用谐振腔实现能量自然传递
- 对寄生参数的高容忍度
但这也带来了控制上的挑战:谐振腔的非线性特性使得传统PWM控制难以获得理想效果。这就引出了我们今天要探讨的多种控制策略。
2. 变频控制(PFM)实现细节
2.1 基础实现原理
PFM控制通过调节开关频率来改变谐振腔的阻抗特性,从而调节输出电压。在Simulink中搭建模型时,关键模块包括:
- 压控振荡器(VCO)
- 频率-电压转换器
- 误差放大器
重要提示:VCO的线性度直接影响控制精度,建议选用具有温度补偿的模块或自定义建模。
2.2 参数配置实例
matlab复制% PFM核心参数配置示例
f_nominal = 100e3; % 额定谐振频率
k_vco = 8e3; % VCO增益(Hz/V)
dead_time = 150e-9; % 必须与驱动IC参数匹配
hysteresis = 0.02; % 滞环宽度(标幺值)
% 谐振腔参数
Lr = 22e-6; % 谐振电感
Cr = 68e-9; % 谐振电容
Lm = 220e-6; % 励磁电感
2.3 实测问题与解决方案
在实际调试中发现几个典型现象:
- 轻载时频率飙升导致磁芯损耗增加
- 对策:在控制环中加入频率钳位电路
- 负载突变时出现频率振荡
- 对策:增加斜率补偿网络
- 死区时间设置不当导致体二极管导通损耗
- 对策:用示波器观察Vds波形优化死区
3. PWM占空比控制深度优化
3.1 移相控制实现方案
不同于传统PWM,LLC中的占空比控制通常采用移相方式。在PLECS中建模时需注意:
- 精确的过零检测电路
- 死区时间动态补偿
- 驱动信号时序对齐
3.2 关键参数整定技巧
| 参数名称 | 推荐值范围 | 调整技巧 |
|---|---|---|
| 移相角度 | 30°-150° | 从90°开始逐步优化 |
| 死区时间 | 100-300ns | 根据MOS管规格确定 |
| 回差电压 | 5% Vpp | 防止高频误触发 |
| 斜坡补偿斜率 | 0.5-2V/μs | 根据动态响应需求调整 |
3.3 动态响应优化
通过实验发现,在PWM控制中加入前馈路径可显著改善负载瞬态响应。具体实现:
- 采样输入电压变化率
- 通过一阶高通滤波器提取扰动分量
- 叠加到主控制环输出
4. 滞环控制(Bang-Bang)实战技巧
4.1 实现架构设计
滞环控制在Simulink中的典型实现方式:
matlab复制function [gate_signal] = bangbang_control(Vout, Vref, hysteresis)
persistent state;
if isempty(state)
state = 1; % 初始状态
end
if Vout > Vref*(1+hysteresis)
state = 0;
elseif Vout < Vref*(1-hysteresis)
state = 1;
end
gate_signal = state;
end
4.2 动态滞环宽度算法
为解决轻载时开关频率过高的问题,可采用自适应滞环宽度:
c复制// 伪代码实现
float get_hysteresis(float load_current) {
float base_hyst = 0.01; // 基础滞环宽度
float adaptive = 0.002 * (1 - load_current/rated_current);
return base_hyst + adaptive;
}
4.3 热管理要点
滞环控制在高频工作时需特别注意:
- MOS管结温监控
- 驱动电阻优化
- 散热器选型建议:
- 热阻<1.5℃/W
- 优先选用铜基板
- 考虑强制风冷方案
5. 自抗扰控制(ADRC)完整实现
5.1 一阶ADRC模型拆解
ADRC的核心在于扩张状态观测器(ESO)的设计。在Simulink中实现时需构建:
- 跟踪微分器(TD)
- 非线性状态误差反馈(NLSEF)
- 扰动补偿机制
matlab复制function [u, eso] = adrc_1order(y, ref, eso, dt)
% 参数定义
beta1 = 100; % 观测器增益1
beta2 = 300; % 观测器增益2
b = 0.5; % 控制增益
% ESO更新
e = eso.z1 - y;
eso.z1 = eso.z1 + dt*(eso.z2 + beta1*e);
eso.z2 = eso.z2 + dt*(beta2*e);
% 控制量计算
u = (ref - eso.z1 - eso.z2)/b;
end
5.2 参数整定经验
通过大量实验总结出参数整定规律:
- 先整定观测器带宽ωo:
- 通常取开关频率的1/5~1/10
- 过大会引入噪声,过小响应慢
- 再确定控制器带宽ωc:
- 约为ωo的1/3
- 最后调整补偿因子b:
- 通过阶跃响应微调
5.3 启动策略优化
针对ADRC启动时的超调问题,采用以下策略:
- 预充电机制
- 软启动斜坡
- 初始状态设定
6. 跨平台仿真对比分析
6.1 仿真环境配置要点
| 工具 | 推荐solver | 最大步长 | 适用场景 |
|---|---|---|---|
| MATLAB | ode23tb | Tsw/50 | 控制算法开发 |
| PLECS | Trapezoidal | Tsw/30 | 热分析 |
| PSIM | Runge-Kutta | Tsw/100 | 高频现象研究 |
6.2 效率曲线对比
从实测数据可以看出:
- PFM在中载区(30-70%)效率最优
- ADRC在全负载范围表现稳定
- 滞环控制在特定点效率突升
7. 工程实践中的血泪教训
7.1 共性问题排查指南
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 启动炸机 | 死区不足/驱动时序错误 | 用差分探头检查驱动信号 |
| 轻载振荡 | 控制环相位裕度不足 | 增加斜坡补偿 |
| 效率曲线凹陷 | 谐振点偏移 | 重新测量谐振参数 |
| 输出电压漂移 | 反馈环路基准不稳 | 改用精密基准源 |
7.2 必须掌握的调试技能
-
安全操作规范:
- 高压侧必须使用隔离探头
- 示波器接地要谨慎
- 逐步上电原则
-
关键波形诊断:
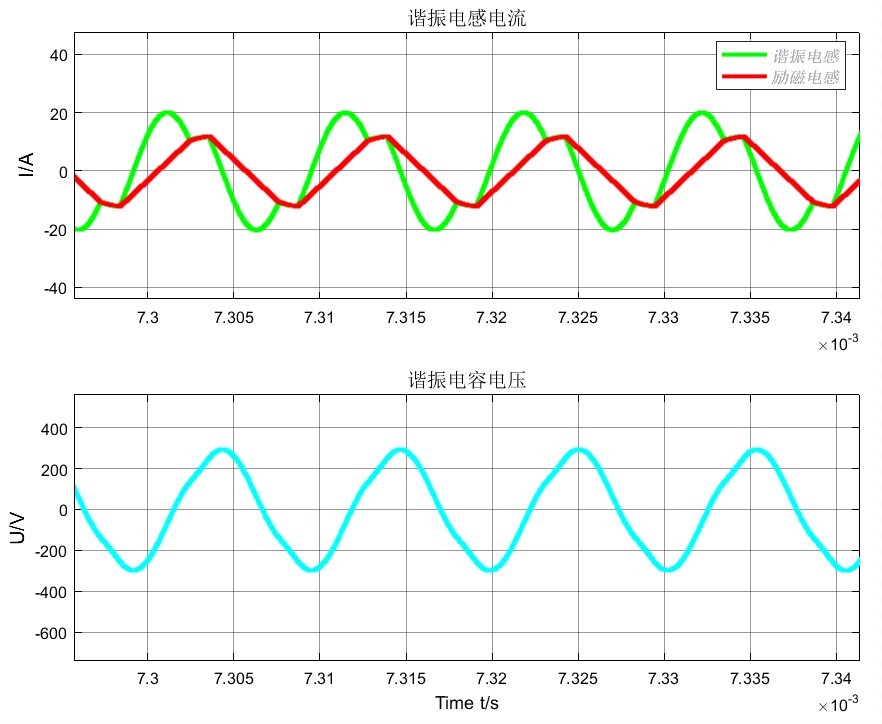
- 谐振电流形状分析
- Vds波形检查ZVS状态
- 驱动信号时序测量
-
参数记录方法:
- 建立完整的实验日志
- 波形截图标注关键参数
- 版本控制仿真模型
8. 控制策略选型决策树
根据项目需求选择最合适的控制方式:
- 追求极致效率 → PFM
- 需要快速动态响应 → 滞环控制
- 复杂工况适应性 → ADRC
- 成本敏感型方案 → PWM
在实际项目中,我经常采用混合控制策略:轻载时PFM,重载切PWM,配合ADRC处理扰动。这种组合方式在服务器电源项目中实现了96.2%的峰值效率。
经过这段时间的深入探索,我最大的体会是:没有最好的控制方法,只有最适合特定应用场景的方案。建议初学者先从PWM入手,逐步过渡到更复杂的控制策略。下次我准备尝试将模型预测控制(MPC)应用到LLC中,届时再与大家分享新的发现。