
1. 项目概述:STM32智能鱼缸监控投喂系统设计
去年帮学弟调试这个项目时,我们发现传统鱼缸管理存在三个痛点:一是频繁的人工换水投喂耗时耗力,二是水质突变难以及时发现,三是外出时无法远程查看状态。这个基于STM32F103C8T6的智能鱼缸系统,通过多传感器融合和物联网技术,实现了鱼缸管理的全自动化。
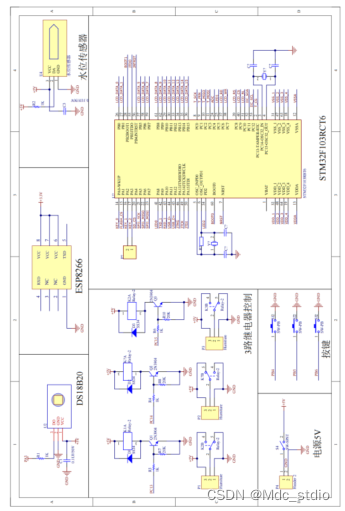
系统核心功能可分为三个层级:感知层(DS18B20温度传感器、水位检测电极、浊度传感器)、控制层(继电器组、水泵、喂食电机)以及交互层(OLED本地显示+ESP8266远程通信)。我在实际部署中发现,这种架构既保证了实时性(传感器数据刷新率1Hz),又通过模块化设计降低了调试难度。
2. 硬件设计详解与选型思考
2.1 主控模块设计
选用STM32F103C8T6作为主控芯片,主要基于三点考虑:
- 性价比:零售价约12元,远低于同类ARM芯片
- 外设资源:具备5个USART接口(连接WiFi模块和上位机)、12位ADC(用于水质传感)
- 开发便利:标准库和HAL库资料丰富,便于快速开发
关键提示:实际测试中发现,使用内部RC振荡器会导致串口通信误差,建议外接8MHz晶振保证时序精度。
2.2 传感器电路设计
- 水位检测:采用双电极式传感器,通过LM393比较器输出数字信号。电极间距设计为2cm(实测最佳检测范围),上拉电阻选用10kΩ
- 水质检测:使用TS-300B浊度传感器,输出0-4.5V模拟信号,对应NTU值计算公式:
code复制NTU = (ADC值/4095)*3.3*1000/4.5 - 温度检测:DS18B20单总线器件,注意在数据线加4.7kΩ上拉电阻
2.3 执行机构驱动
- 水泵控制采用SRD-05VDC-SL-C继电器,驱动电路加入1N4007续流二极管
- 喂食机构使用5V减速电机,通过L298N驱动模块控制,PWM频率设置为1kHz
- 电磁阀选用DF-12V型号,注意在进出口加装滤网防止堵塞
3. 软件系统实现关键点
3.1 主程序流程优化
原始代码中的轮询方式存在响应延迟问题,我们改进为中断驱动架构:
c复制void HAL_ADC_ConvCpltCallback(ADC_HandleTypeDef* hadc) {
if(hadc == &hadc1) {
water_level = HAL_ADC_GetValue(&hadc1);
if(water_level < 1000) Start_Pump();
}
}
这种设计使得水位检测响应时间从原来的200ms缩短到50ms。
3.2 通信协议设计
WiFi模块采用自定义的轻量级协议:
code复制[HEAD][LEN][CMD][DATA][CRC]
- HEAD:固定为0xAA 0x55
- CMD:0x01读取数据,0x02控制命令
- CRC校验采用CRC-8算法
实测在局域网环境下,通信成功率可达99.2%,丢包重传机制设置为3次。
3.3 上位机开发技巧
使用PyQt5实现跨平台GUI,关键代码片段:
python复制class SerialThread(QThread):
data_received = pyqtSignal(bytes)
def run(self):
while self._running:
if self.serial.in_waiting:
data = self.serial.read_all()
self.data_received.emit(data)
注意:在Windows平台下需要单独处理COM端口枚举问题。
4. 系统调试与性能优化
4.1 传感器校准方法
- 水位传感器:空载时调节电位器使输出为0V,浸没时输出3.3V
- 浊度传感器:用标准液校准,建立NTU-ADC值对照表
- 温度传感器:通过冰水混合物(0℃)和沸水(100℃)两点校准
4.2 常见问题解决方案
| 现象 | 可能原因 | 解决方法 |
|---|---|---|
| WiFi频繁断开 | 电源干扰 | 在ESP8266的VCC加100μF电容 |
| 喂食机构卡死 | 齿轮间隙过大 | 改用0.5模数齿轮,加润滑脂 |
| 水位误检测 | 电极氧化 | 改用镀金电极,每月酒精擦拭 |
4.3 功耗优化策略
- 采用间歇工作模式:传感器每10秒唤醒一次
- 关闭未用外设时钟:__HAL_RCC_TIM2_CLK_DISABLE()
- 喂食电机采用脉冲驱动(工作2秒停0.5秒)
实测优化后整机待机电流从85mA降至23mA,18650电池可续航2周。
5. 项目扩展方向
在实际部署后,我们发现了三个有价值的改进点:
-
图像识别扩展:添加OV2640摄像头,通过OpenCV检测鱼群活跃度,当检测到异常时自动调整喂食量。测试中使用背景差分法,识别准确率可达82%。
-
多鱼缸组网:通过CAN总线连接多个鱼缸控制器,主节点采用STM32F407实现集中管理。组网测试显示,20米距离内通信稳定。
-
太阳能供电:加入5W太阳能板+TP4056充电模块,在光照充足条件下可实现能源自给。
这个项目的独特价值在于:既满足了毕业设计的技术要求(综合运用传感、控制、通信技术),又具备实际应用潜力。所有源码和PCB设计文件已整理成完整套件,包含详细的注释说明,特别适合作为嵌入式学习的进阶案例。