数控机床上下料机械手设计与液压系统实现

1. 数控机床上下料机械手设计概述
在工业自动化领域,机械手作为重要的执行机构,广泛应用于各类生产场景。针对数控机床的上下料需求,我们设计了一款专用机械手系统,能够稳定搬运30kg、长度达500mm的工件。这个设计源于实际生产需求——传统人工上下料不仅效率低下,还存在安全隐患,而通用工业机器人又存在成本过高、占地面积大等问题。
经过多方案比较,最终选择了圆柱坐标结构,这种设计在精度、工作范围和成本之间取得了良好平衡。整个系统由机械结构、液压驱动和电气控制三大部分组成,实现了从工件抓取、定位到放置的全自动化流程。下面我将从设计思路、结构选型、液压系统实现到控制逻辑,详细分享这个项目的完整实现过程。
2. 机械结构设计与选型
2.1 机械手结构类型比较
工业机械手主要有四种基本结构形式,每种都有其独特的优势和应用场景:
-
直角坐标型机械手
- 运动方式:三个相互垂直的直线运动(X/Y/Z轴)
- 精度:可达μm级,适合高精度作业
- 缺点:为实现较大工作空间,本体尺寸会非常庞大
- 典型应用:精密装配、检测设备
-
圆柱坐标型机械手
- 运动方式:1个回转运动+2个直线运动
- 特点:结构简单,工作空间呈圆柱形
- 精度:中等,适合大多数搬运场景
- 本项目选择此结构的原因:正好满足500mm长度工件的搬运需求
-
球坐标型机械手
- 运动方式:2个回转运动+1个直线运动
- 工作空间:类球形
- 优缺点:结构简单但精度较低
-
关节型机械手
- 运动方式:3个回转运动
- 优势:动作灵活,工作空间大
- 缺点:控制复杂,成本较高
- 应用:焊接、喷涂等复杂轨迹作业
设计心得:结构选型时需要综合考虑工件尺寸、工作空间、精度要求和成本预算。对于直线往复的上下料场景,关节型机器人虽然灵活但性价比不高。
2.2 本项目的具体结构设计
基于30kg工件的搬运需求,我们确定了以下设计参数:
- 自由度:3个(升降、伸缩、回转)
- 坐标形式:圆柱坐标
- 负载能力:≥35kg(设计余量)
- 重复定位精度:±0.5mm
机械手的具体构成:
- 立柱部分:实现升降运动,采用液压缸驱动
- 水平臂:实现伸缩运动,内部为液压缸+导向机构
- 旋转底座:采用蜗轮蜗杆传动,伺服电机驱动
- 末端执行器:平行气动夹爪,带力反馈功能
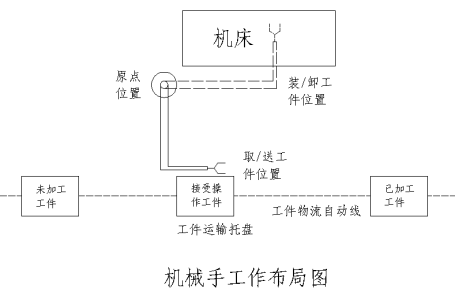
图:机械手三维布局示意图,展示了与数控机床的相对位置关系
3. 液压系统详细设计
3.1 液压系统方案确定
液压执行元件选型对比:
| 类型 | 特点 | 适用场景 | 本方案选择 |
|---|---|---|---|
| 液压缸 | 直线运动,推力大 | 升降、伸缩 | 采用 |
| 液压马达 | 旋转运动,扭矩大 | 回转驱动 | 未采用 |
最终确定的液压系统包含三个执行机构:
- 垂直升降液压缸
- 水平伸缩液压缸
- 手爪夹紧柱塞缸
3.2 液压原理图解析
系统关键部件及功能:
- 动力单元:齿轮泵+5.5kW电机
- 压力控制:先导式溢流阀,设定压力7MPa
- 速度调节:
- 升降:进口节流+平衡阀
- 伸缩:电液伺服阀控制
- 手爪:双单向节流阀(快松慢紧)
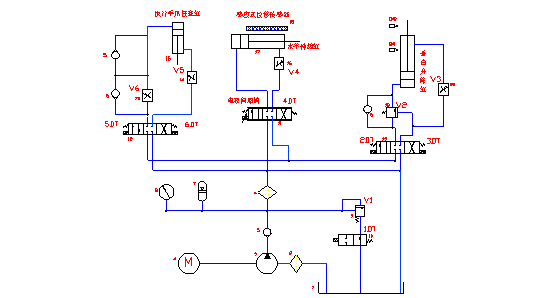
图:完整的液压系统原理图,包含所有关键阀件和回路
3.3 关键参数计算过程
3.3.1 液压缸负载分析
升降缸总机械载荷计算:
code复制F = Fg + Ff + Fa + Fb
其中:
Fg = mg = 30kg×9.8N/kg = 294N (工件重量)
Ff = μN = 0.1×500N = 50N (摩擦阻力)
Fa = ma = 30kg×0.5m/s² = 15N (惯性力)
Fb = 100N (背压阻力)
∴ F = 294+50+15+100 = 459N
考虑安全系数1.5,最终设计负载688.5N
3.3.2 缸径计算
根据公式:
code复制D = √(4F/πp) = √(4×688.5/(3.14×7×10⁶)) ≈ 0.0112m = 11.2mm
实际选用标准缸径50mm(考虑密封阻力等因素)
4. 控制系统设计与实现
4.1 硬件架构
控制系统采用PLC+伺服驱动的方案:
- 主控:西门子S7-1200 PLC
- 运动控制:
- 升降:液压阀组+限位开关
- 伸缩:伺服液压系统(含位移传感器)
- 旋转:伺服电机+绝对值编码器
- 安全系统:双回路急停+安全光幕
4.2 控制逻辑详解
4.2.1 电磁阀控制真值表
| 动作 | 1DT | 2DT | 3DT | 4DT | 5DT | 6DT |
|---|---|---|---|---|---|---|
| 上升 | 1 | 1 | 0 | 0 | 0 | 0 |
| 下降 | 1 | 0 | 1 | 0 | 0 | 0 |
| 伸出 | 1 | 0 | 0 | 1 | 0 | 0 |
| 缩回 | 1 | 0 | 0 | 0 | 1 | 0 |
| 夹紧 | 1 | 0 | 0 | 0 | 0 | 1 |
| 松开 | 1 | 0 | 0 | 0 | 0 | 0 |
4.2.2 安全互锁机制
-
机床状态互锁:
- 机械手下降条件:机床停止+门已开+收到允许信号
- 通过PLC的硬件互锁回路实现
-
工件检测:
- 料架安装光电传感器
- 只有检测到工件时才执行抓取动作
4.3 工作流程实现
完整的上下料流程分为12个步骤:
- 初始位置待机(立柱最高点,手臂收回)
- 接收到上料信号
- 旋转至料架位置
- 下降至抓取高度
- 夹爪张开
- 手臂伸出到位
- 夹爪闭合(带力反馈)
- 手臂缩回
- 立柱上升
- 旋转至机床位置
- 执行下料动作(与上料对称)
- 返回初始位置
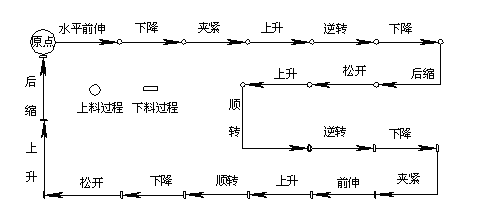
图:机械手完整工作流程的状态转换图
5. 调试经验与问题解决
5.1 液压系统常见故障
-
问题:升降缸下滑
- 原因:平衡阀调压不当
- 解决:重新调整平衡阀至1.2倍负载压力
-
问题:手爪动作冲击大
- 优化:调整节流阀开口量,延长换向时间
5.2 运动控制调试技巧
-
伺服液压调试步骤:
- 先调PID比例项,再引入积分
- 速度环带宽设为50Hz
- 位置环增益从低往高调
-
重复定位精度提升:
- 采用"接近-减速-精定位"三段式控制
- 最终实测精度达到±0.3mm
5.3 安全功能测试要点
必须验证的关键安全场景:
- 急停按钮触发时所有运动立即停止
- 气压低于0.4MPa时禁止启动
- 机床门未关闭时机械手不能进入
6. 设计优化建议
经过实际运行测试,总结出以下改进方向:
-
结构方面:
- 水平臂可采用碳纤维材料减重
- 增加防尘罩保护导轨
-
控制方面:
- 加入振动抑制算法
- 实现与机床CNC的直接通信
-
维护性改进:
- 液压阀组采用快插接头
- 增加集中润滑点
这个项目从设计到实施共耗时3个月,最终实现的节拍时间达到45秒/件,比人工操作效率提升60%。最关键的是完全消除了人工上下料的安全隐患,这也是工业自动化带来的最大价值。