STM32直流有刷电机控制与H桥驱动详解

1. 直流有刷电机基础原理
1.1 电磁学基础与电机工作原理
直流有刷电机的运转本质上是电磁感应现象的具体应用。理解电机工作原理需要掌握两个基本电磁学定律:
左手定则(电动机定则):用于判断通电导体在磁场中的受力方向。具体操作为:
- 伸开左手,使拇指与其余四指垂直
- 让磁感线垂直穿过掌心(N极指向S极)
- 四指指向电流方向
- 拇指所指方向即为导体受力方向
右手定则(发电机定则):用于判断导体切割磁感线时产生的感应电流方向。这个定则在电机作为发电机使用时尤为重要。
在实际电机设计中,转子上通常布置多组线圈(称为电枢绕组),配合换向器和电刷实现持续旋转。这种设计解决了单线圈电机的几个关键问题:
- 消除死点位置(线圈平面与磁场平行时力矩为零)
- 提供更平稳的转矩输出
- 提高功率密度
专业提示:现代直流有刷电机通常采用斜槽设计(转子铁芯槽与轴线呈一定角度),这能进一步减小转矩脉动,使运行更加平稳。
1.2 电机基本结构与部件功能
典型直流有刷电机包含以下核心部件:
-
定子组件:
- 永磁体或励磁绕组:建立主磁场
- 机壳:提供机械支撑和磁路闭合
-
转子组件:
- 电枢铁芯:硅钢片叠压而成,减少涡流损耗
- 电枢绕组:多组线圈按特定规律绕制
- 换向器:由多个铜片组成的圆柱体,与电刷接触
-
辅助部件:
- 电刷:通常为石墨材料,提供滑动电接触
- 轴承:支撑转子旋转
- 端盖:固定轴承并封闭电机
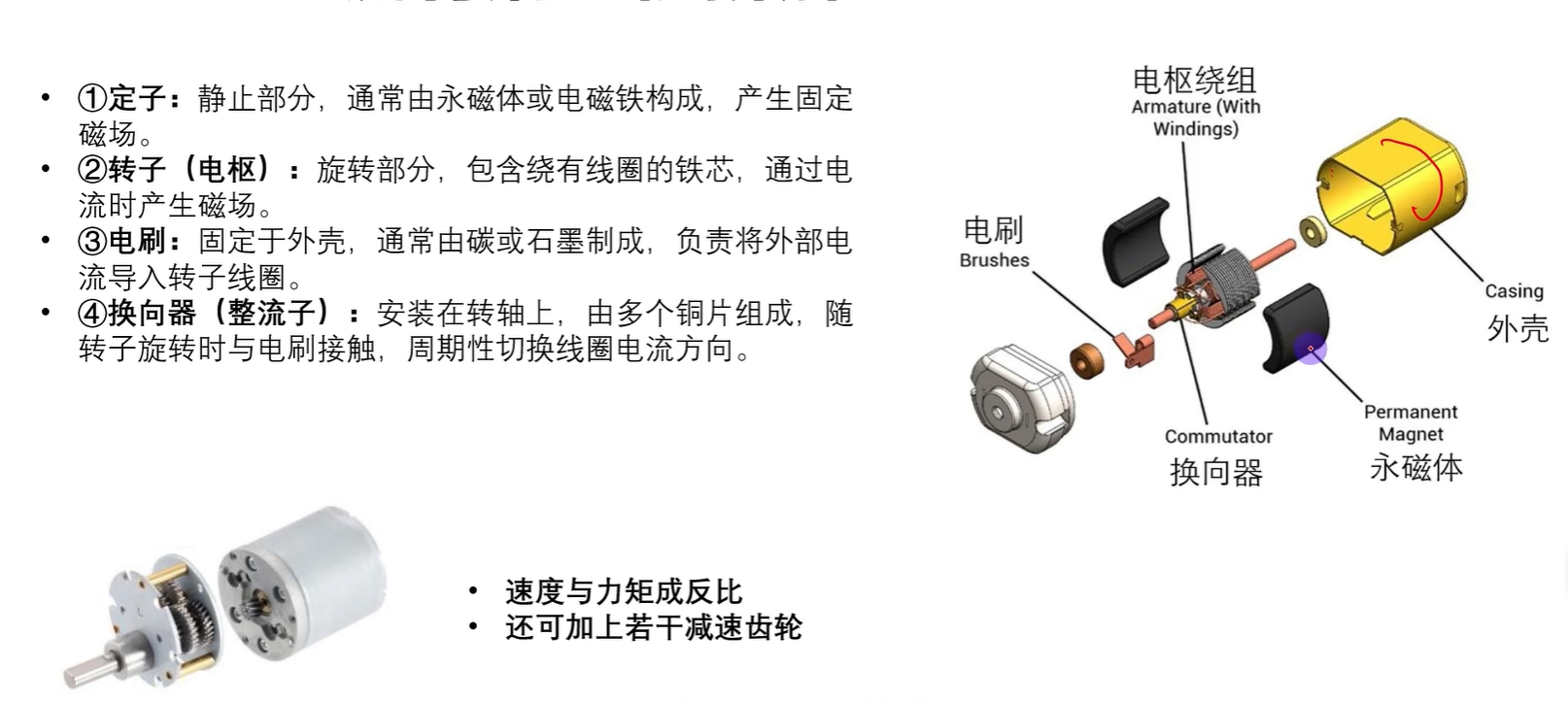
表:直流有刷电机主要参数说明
| 参数 | 典型值 | 说明 |
|---|---|---|
| 额定电压 | 6-24V | 工作电压范围 |
| 空载转速 | 3000-10000rpm | 无负载时的最高转速 |
| 堵转电流 | 0.5-5A | 转子堵转时的电流 |
| 额定转矩 | 0.01-0.5N·m | 连续工作允许输出转矩 |
2. H桥驱动电路详解
2.1 H桥基本原理与工作模式
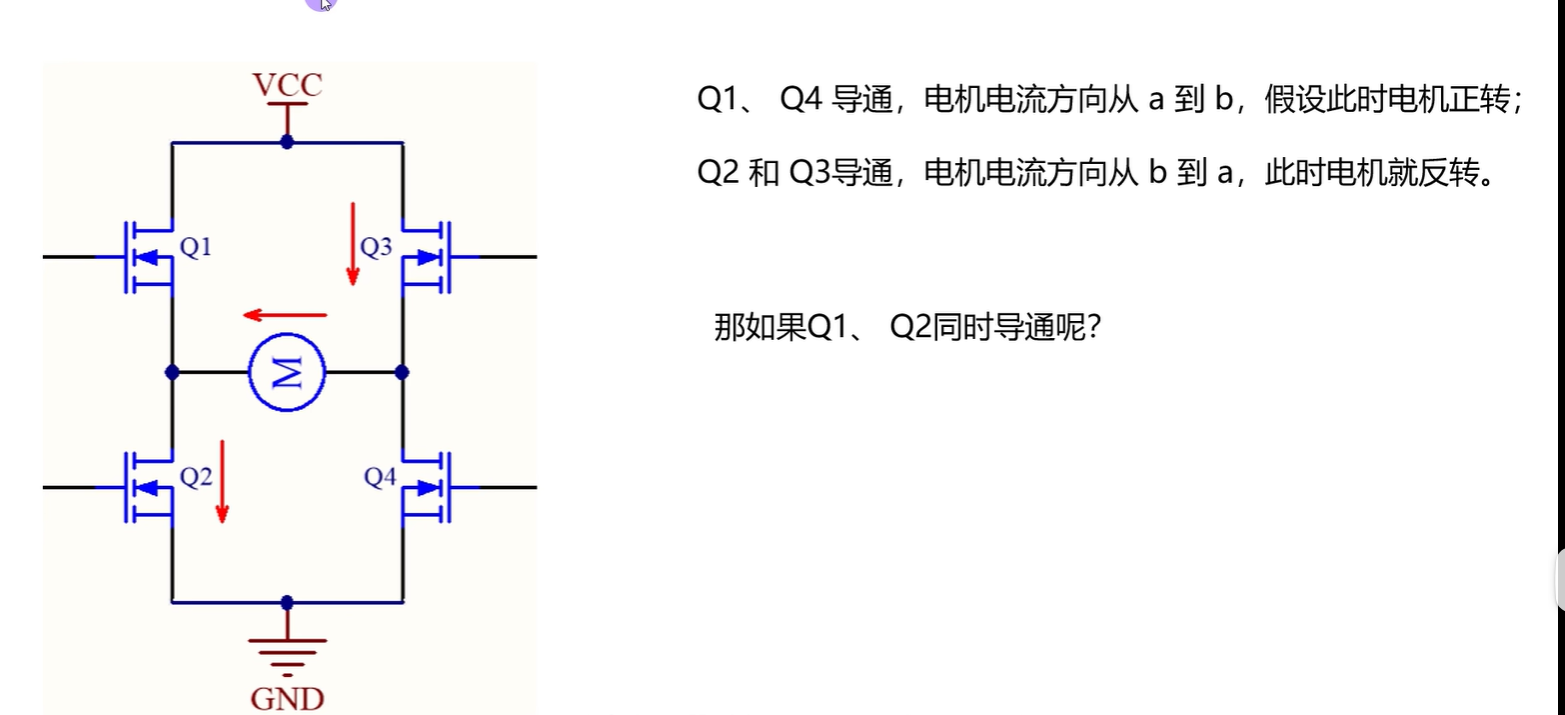
H桥电路因其拓扑结构形似字母"H"而得名,是控制直流电机最常用的驱动电路。基本H桥由四个开关管(MOSFET或晶体管)组成,通过不同开关组合实现电机正反转和制动控制。
典型工作状态:
-
正转模式:
- Q1和Q4导通,Q2和Q3关断
- 电流路径:VCC→Q1→电机→Q4→GND
-
反转模式:
- Q2和Q3导通,Q1和Q4关断
- 电流路径:VCC→Q3→电机→Q2→GND
-
制动模式:
- 动态制动:Q1和Q3导通,电机两端短接
- 再生制动:利用电机反电动势回馈能量
-
自由停止:
- 所有开关管关断
- 电机依靠惯性滑行停止
2.2 关键保护机制设计
H桥电路设计中最危险的问题是直通短路(Shoot-through),即同一桥臂上下管同时导通造成的电源直接短路。为防止这种情况,必须实现以下保护措施:
-
死区时间控制:
- 典型值:100ns-1μs
- 确保一个开关管完全关断后再开启另一个
- 可通过硬件RC电路或软件延时实现
-
互锁逻辑:
- 硬件互锁:使用与非门等逻辑电路确保上下管信号互斥
- 软件互锁:在固件中设置状态检查
-
栅极驱动设计:
- 使用专用驱动芯片(如IR2104)
- 集成自举电路解决高端驱动问题
- 提供足够的驱动电流(通常>1A)
表:常见H桥驱动芯片对比
| 型号 | 最大电压 | 峰值电流 | 集成度 | 特点 |
|---|---|---|---|---|
| L298N | 46V | 2A | 双H桥 | 经济实用,需外接续流二极管 |
| TB6612 | 15V | 1.2A | 双H桥 | 低功耗,内置保护电路 |
| DRV8833 | 11V | 1.5A | 双H桥 | 小封装,低导通电阻 |
| VNH5019 | 41V | 30A | 单H桥 | 大电流,集成电流检测 |
实践建议:对于STM32项目,推荐使用TB6612或DRV8833这类集成驱动芯片,它们体积小、外围电路简单,且内置了必要的保护功能。
3. STM32硬件接口设计
3.1 外设资源配置策略
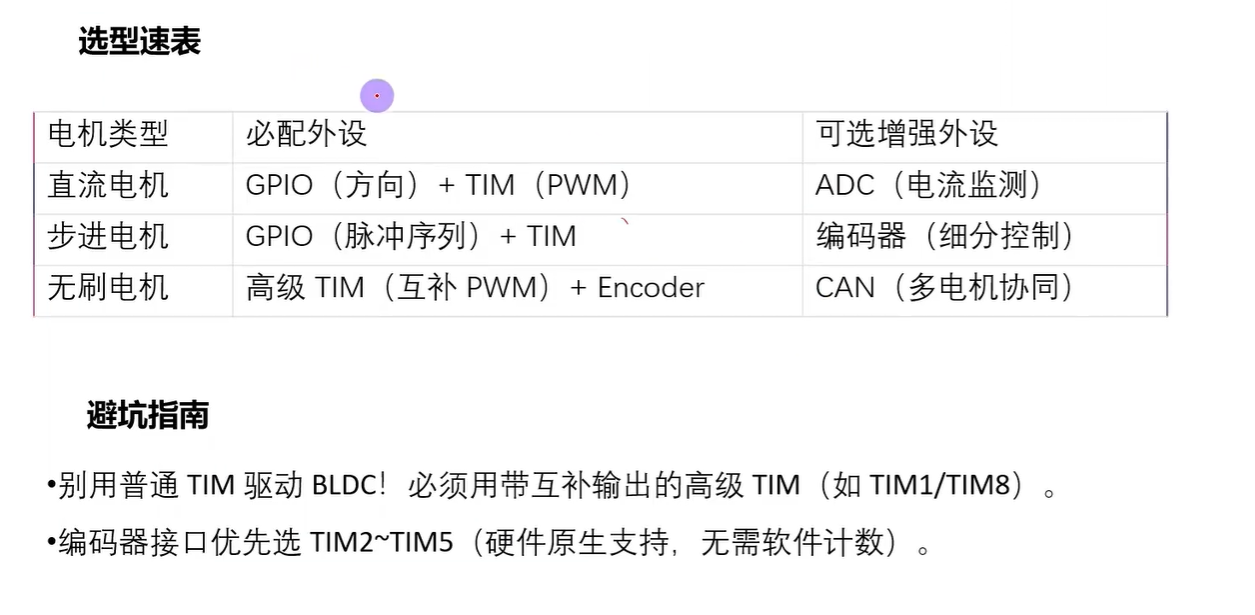
STM32系列单片机提供了丰富的外设资源用于电机控制,合理配置这些资源对系统性能至关重要:
-
定时器选择:
- 基础PWM生成:TIM1-TIM5(高级定时器支持互补输出和死区控制)
- 编码器接口:TIM2-TIM5(支持正交编码器模式)
- 通用定时:TIM6-TIM7(用于时间基准)
-
GPIO配置:
- 驱动芯片使能端:推挽输出
- 方向控制:推挽输出
- 限位开关:外部中断输入
-
ADC应用:
- 电流检测:通过采样电阻+运放电路
- 电压监测:分压电路直接测量
3.2 高级定时器配置要点
使用STM32高级定时器(如TIM1/TIM8)生成带死区的PWM波时,需要特别注意以下配置步骤:
-
时钟配置:
c复制
RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE); -
时基初始化:
c复制TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; TIM_TimeBaseStructure.TIM_Period = 999; // PWM周期= (999+1)/72MHz = 13.89us (72kHz) TIM_TimeBaseStructure.TIM_Prescaler = 0; // 无分频 TIM_TimeBaseStructure.TIM_ClockDivision = 0; TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; TIM_TimeBaseInit(TIM1, &TIM_TimeBaseStructure); -
PWM输出配置:
c复制TIM_OCInitTypeDef TIM_OCInitStructure; TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; TIM_OCInitStructure.TIM_OutputNState = TIM_OutputNState_Enable; TIM_OCInitStructure.TIM_Pulse = 500; // 初始占空比50% TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; TIM_OCInitStructure.TIM_OCNPolarity = TIM_OCNPolarity_High; TIM_OCInitStructure.TIM_OCIdleState = TIM_OCIdleState_Set; TIM_OCInitStructure.TIM_OCNIdleState = TIM_OCNIdleState_Reset; TIM_OC1Init(TIM1, &TIM_OCInitStructure); -
死区时间设置:
c复制TIM_BDTRInitTypeDef TIM_BDTRInitStructure; TIM_BDTRInitStructure.TIM_OSSRState = TIM_OSSRState_Enable; TIM_BDTRInitStructure.TIM_OSSIState = TIM_OSSIState_Enable; TIM_BDTRInitStructure.TIM_LOCKLevel = TIM_LOCKLevel_1; TIM_BDTRInitStructure.TIM_DeadTime = 0x54; // 约1us死区时间 TIM_BDTRInitStructure.TIM_Break = TIM_Break_Disable; TIM_BDTRInitStructure.TIM_BreakPolarity = TIM_BreakPolarity_Low; TIM_BDTRInitStructure.TIM_AutomaticOutput = TIM_AutomaticOutput_Enable; TIM_BDTRConfig(TIM1, &TIM_BDTRInitStructure); -
使能定时器:
c复制
TIM_CtrlPWMOutputs(TIM1, ENABLE); TIM_Cmd(TIM1, ENABLE);
调试技巧:使用STM32CubeMX工具可以直观地配置定时器参数并生成初始化代码,大大简化开发流程。但要注意检查生成的死区时间是否满足驱动芯片要求。
4. 编码器接口与速度测量
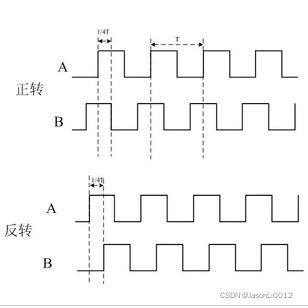
4.1 编码器类型与工作原理
直流电机常用的位置/速度传感器主要有两种类型:
-
光电编码器:
- 通过光栅盘和光电传感器检测位置
- 分辨率高(通常100-5000PPR)
- 对灰尘和振动敏感
-
霍尔编码器:
- 利用霍尔效应检测磁极变化
- 结构简单,抗干扰能力强
- 分辨率较低(通常12-200PPR)
4.2 STM32编码器接口配置
STM32的定时器编码器接口模式可以高效处理正交编码器信号,典型配置步骤如下:
-
GPIO初始化:
c复制
GPIO_InitTypeDef GPIO_InitStructure; RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOA, &GPIO_InitStructure); -
定时器编码器模式配置:
c复制TIM_EncoderInterfaceConfig(TIM3, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising); TIM_SetCounter(TIM3, 0); TIM_Cmd(TIM3, ENABLE); -
速度计算算法:
c复制int32_t GetSpeedRPM(void) { static int32_t last_count = 0; int32_t current_count = TIM_GetCounter(TIM3); int32_t delta = current_count - last_count; last_count = current_count; // 假设编码器100PPR,4倍频,减速比30 // 每转脉冲数 = 100×4 = 400 // 电机转数 = delta / (400×30) float rpm = (delta * 60.0f) / (400.0f * 30.0f); // 转换为RPM return (int32_t)rpm; }
4.3 速度控制算法实现
基于PID的速度控制算法实现要点:
-
PID参数结构体:
c复制typedef struct { float Kp; // 比例系数 float Ki; // 积分系数 float Kd; // 微分系数 float integral; // 积分项 float prev_err; // 上次误差 float max_out; // 输出限幅 } PID_Controller; -
PID计算函数:
c复制float PID_Compute(PID_Controller* pid, float setpoint, float feedback) { float error = setpoint - feedback; // 比例项 float P = pid->Kp * error; // 积分项(抗饱和处理) pid->integral += error; if(pid->integral > pid->max_out) pid->integral = pid->max_out; if(pid->integral < -pid->max_out) pid->integral = -pid->max_out; float I = pid->Ki * pid->integral; // 微分项 float D = pid->Kd * (error - pid->prev_err); pid->prev_err = error; // 总和输出 float output = P + I + D; if(output > pid->max_out) output = pid->max_out; if(output < -pid->max_out) output = -pid->max_out; return output; } -
速度控制任务:
c复制void SpeedControlTask(void) { static PID_Controller speed_pid = { .Kp = 0.5f, .Ki = 0.1f, .Kd = 0.01f, .max_out = 100.0f }; int32_t actual_speed = GetSpeedRPM(); float pwm = PID_Compute(&speed_pid, target_speed, actual_speed); // 更新PWM输出 if(pwm >= 0) { SetDirection(FORWARD); SetPWM((uint32_t)fabs(pwm)); } else { SetDirection(BACKWARD); SetPWM((uint32_t)fabs(pwm)); } }
调试经验:PID参数整定应遵循"先P后I最后D"的原则。初始调试时先将Ki和Kd设为0,逐渐增大Kp直到系统出现等幅振荡,然后取该值的50%作为最终Kp。Ki一般取Kp的1/10到1/5,Kd取Kp的1/100到1/50。
5. 系统集成与调试技巧
5.1 硬件布局注意事项
-
电源设计:
- 电机电源与MCU电源分开供电
- 使用大容量电解电容(100-1000μF)就近放置在电机驱动模块旁
- 每个IC的VCC引脚添加0.1μF去耦电容
-
信号隔离:
- PWM信号线尽量短(<10cm)
- 编码器信号线使用双绞线或屏蔽线
- 必要时使用光耦隔离数字信号
-
散热设计:
- 驱动芯片添加足够面积的散热片
- 避免将大电流走线布置在MCU下方
- 留出空气流通通道
5.2 常见故障排查指南
表:直流电机控制系统常见问题及解决方法
| 现象 | 可能原因 | 排查方法 |
|---|---|---|
| 电机不转 | 电源未接通 | 检查电源指示灯 |
| 使能信号无效 | 测量EN引脚电平 | |
| PWM信号异常 | 用示波器检查PWM输出 | |
| 电机单向转动 | H桥一侧损坏 | 交换IN1/IN2测试 |
| 方向信号固定 | 检查GPIO配置 | |
| 转速不稳定 | PID参数不当 | 重新整定PID |
| 编码器信号干扰 | 检查屏蔽和接地 | |
| 电机发热严重 | 负载过大 | 检查机械传动 |
| PWM频率过低 | 提高至15kHz以上 | |
| 驱动芯片发烫 | 死区时间不足 | 增加死区时间 |
| 散热不足 | 添加散热片 |
5.3 进阶优化方向
-
磁场定向控制(FOC):
- 适用于需要精密控制的场合
- 需要电流检测和更复杂的算法
- STM32F3/F4系列内置硬件加速
-
参数自动整定:
- 实现PID参数的自适应调整
- 基于系统响应特性自动优化
-
网络化控制:
- 通过CAN总线实现多电机协同
- 支持远程监控和参数调整
-
能量回馈设计:
- 制动能量回收
- 提高系统能效
在实际项目中,我发现电机控制系统的稳定性很大程度上取决于电源质量。一个实用的技巧是在电源输入端增加一个共模扼流圈,能有效抑制电机产生的电源干扰。另外,对于长时间运行的设备,建议定期检查电刷磨损情况,这往往是导致性能下降的首要原因。