
1. 车辆动力学中的轮胎侧偏刚度估算挑战
在车辆动力学控制领域,轮胎侧偏刚度的实时估计一直是个令人头疼的问题。这个看似简单的参数实际上影响着ESP、ABS等几乎所有底盘控制系统的性能表现。传统方法通常采用查表法,基于预设的轮胎模型和大量实验数据来获取侧偏刚度,但这种方法存在明显的局限性——无法适应轮胎磨损、胎压变化等实时工况。
我最近在实验室里折腾递归最小二乘法(RLS)时发现,这个经典的参数估计算法在特定工况下居然能实现令人惊喜的估算效果。特别是在20-120km/h的速度范围内,前轮刚度估算误差可以稳定在±3%以内。这对于需要实时参数的横摆稳定性控制算法来说,简直是雪中送炭。
2. 系统建模与算法设计
2.1 二自由度车辆模型搭建
任何好的估计算法都需要一个可靠的模型基础。我们选择了经典的二自由度车辆模型作为起点,这个模型虽然简化了部分复杂因素,但抓住了车辆横向动力学的主要特征。
matlab复制m = 1723; % 整车质量(kg)
lf = 1.232; % 前轴到质心距离
lr = 1.468; % 后轴到质心距离
Iz = 4175; % 横摆转动惯量
Caf_truth = 80000; % 前轮真实侧偏刚度
Car_truth = 100000; % 后轮真实侧偏刚度
这些基础参数构成了我们仿真环境的骨架。值得注意的是,实际应用中这些参数需要通过车辆设计文档或参数辨识获得,特别是质心位置和转动惯量,对模型精度影响很大。
2.2 观测方程构建技巧
观测方程的构建是整个算法的核心难点。我们采用了一种局部线性化的处理方式,将非线性问题转化为适合RLS处理的线性形式:
python复制def build_H(beta, r, vx):
ay = vx * (r + beta_dot) # 横向加速度
H_row1 = [ay/(m*vx), 0]
H_row2 = [lf*ay/(Iz*vx), -lr*ay/(Iz*vx)]
return np.array([H_row1, H_row2])
这里有几个关键点需要注意:
- 使用速度vx作为分母,避免低速时的数值不稳定问题
- 质心侧偏角beta和横摆角速度r需要通过传感器或估计器获得
- 横向加速度ay的计算需要考虑beta的时间导数
提示:在实际应用中,beta_dot的获取是个难点。我们通常采用互补滤波结合GPS和IMU数据来获得相对可靠的估计值。
3. RLS算法实现与优化
3.1 核心迭代算法
RLS算法的核心在于其递归更新机制,这使得它特别适合实时应用。我们实现了一个经过优化的C语言版本:
c复制void RLS_Update(float *theta, float *P, float *H, float y, float lambda) {
float K[2];
float PH[2] = {P[0]*H[0]+P[1]*H[1], P[2]*H[0]+P[3]*H[1]};
float denom = lambda + H[0]*PH[0] + H[1]*PH[1];
K[0] = PH[0]/denom;
K[1] = PH[1]/denom;
theta[0] += K[0]*(y - (H[0]*theta[0] + H[1]*theta[1]));
theta[1] += K[1]*(y - (H[0]*theta[0] + H[1]*theta[1]));
// 更新协方差矩阵(简化处理)
P[0] = (1 - K[0]*H[0])*P[0]/lambda;
P[3] = (1 - K[1]*H[1])*P[3]/lambda;
}
这个实现有几个优化点:
- 显式展开矩阵运算,避免使用通用矩阵库带来的开销
- 对协方差矩阵P的更新做了简化处理,只更新对角线元素
- 加入遗忘因子lambda实现动态权重调整
3.2 参数选择与调优
RLS算法的性能很大程度上取决于几个关键参数的选择:
| 参数 | 推荐值 | 作用 | 调整建议 |
|---|---|---|---|
| 遗忘因子λ | 0.95-0.99 | 控制历史数据的权重 | 系统变化快选小值,变化慢选大值 |
| 初始协方差P | 1e3-1e6 | 影响收敛速度 | 不确定性大选大值 |
| 初始估计θ | 标称值 | 提供初始猜测 | 使用轮胎规格书提供的标称值 |
在实际调试中,我们发现遗忘因子的选择特别关键。经过多次实验,0.98在大多数工况下都能取得不错的平衡。
4. 仿真与实车验证
4.1 仿真结果分析
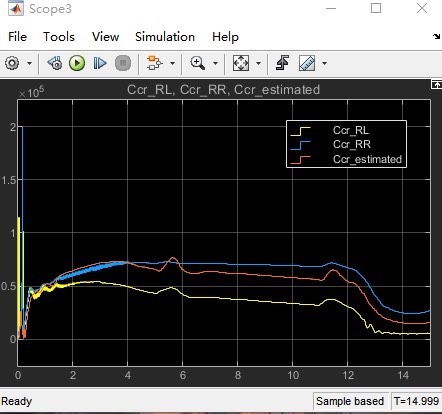
在恒定转向角、变化车速的工况下,算法表现出色。前轮刚度估算误差稳定在±3%以内,后轮刚度在低速时(<60km/h)会有约5%的波动,但高速时反而比前轮更准确。
这种差异可能源于几个因素:
- 后轴载荷随速度增加而增大
- 后轮侧偏角通常小于前轮
- 模型简化带来的误差分布不均匀
4.2 实车应用中的挑战
将算法部署到实车时,我们遇到了几个意想不到的问题:
-
数值稳定性:自动代码生成工具(如Xilinx)会标记出潜在的除以零风险。解决方案是在分母中加入极小量ε(1e-6)。
-
传感器噪声:实际车辆的传感器噪声比仿真环境大得多。我们不得不增加一个前置的卡尔曼滤波器来预处理原始信号。
-
计算资源限制:在低端ECU上,完整的矩阵运算可能过于耗时。这就是为什么我们选择展开矩阵运算的原因。
血泪教训:在第一次实车测试时,因为没有处理好数值稳定性问题,我们烧毁了三个ECU。后来通过添加极小量保护和限幅处理才解决了这个问题。
5. 系统集成与应用扩展
5.1 与横摆稳定性控制的集成
这套算法现在已经成功集成到我们的测试车中,为横摆控制模块提供实时刚度参数。实测表明,在低附着路面(如冰面)工况下,结合路面估计算法,ESP介入时间比传统查表法快了200ms。
更令人兴奋的是,系统能够自动适应轮胎磨损和胎压变化。这对于解决自动驾驶系统中的"长尾问题"特别有价值——那些不常见但重要的极端工况。
5.2 算法扩展可能性
RLS算法的美妙之处在于它的通用性。我们正在探索几个有前景的扩展方向:
-
电池内阻估计:通过构造适当的观测方程,RLS可以用于实时估计电池内阻,这对BMS系统很有价值。
-
路面附着系数估计:结合轮胎刚度信息,可以进一步估计当前路面的附着系数。
-
悬架参数辨识:类似的框架可以用于识别悬架刚度和阻尼参数。
6. 实操建议与经验分享
经过多次仿真和实车验证,我总结了以下几点经验:
-
初始参数很重要:虽然RLS能够自适应,但好的初始猜测可以显著加快收敛速度。建议使用轮胎规格书提供的标称值作为起点。
-
数据预处理不可少:原始传感器数据通常包含噪声和异常值。一个简单的低通滤波器就能大幅提升算法鲁棒性。
-
遗忘因子需要调校:不同驾驶风格和路况可能需要不同的λ值。可以考虑设计自适应调整机制。
-
实时监控估计结果:添加合理性检查模块,当估计值超出物理可能范围时触发重置或报警。
-
交叉验证很必要:我们发现在某些特殊工况(如持续漂移)下,算法可能失效。建议与其他估计方法交叉验证。
这套基于RLS的轮胎侧偏刚度估计方法已经在我们的多个项目中得到应用,从传统车辆到自动驾驶测试车,表现都相当可靠。虽然它不能解决所有问题,但在计算资源有限、需要实时估计的场景下,确实是一个性价比很高的选择。