
1. Buck变换器双闭环控制方案解析
在电力电子领域,Buck变换器作为最基本的DC-DC降压拓扑,其控制策略直接影响系统性能。传统PI控制虽然简单可靠,但在动态响应和抗扰动方面存在局限。我们采用电压外环PI控制+电流内环滑模控制的混合架构,实现了20V输入到10V输出的高效转换。
1.1 系统整体架构设计
双闭环控制结构中,外环负责输出电压调节,内环控制电感电流。这种解耦设计带来三个核心优势:
- 电压环保证稳态精度(PI控制器的积分项消除静差)
- 电流环提升动态响应(滑模控制的强鲁棒性)
- 内环限幅保护功率器件(通过限制电流参考值)
系统工作流程为:输出电压采样→与10V参考值比较→PI控制器生成电流参考→滑模控制器计算占空比→驱动MOSFET开关。关键设计参数如下表:
| 参数 | 取值 | 设计依据 |
|---|---|---|
| 开关频率 | 100kHz | 兼顾效率与动态性能 |
| 电感值 | 47μH | 纹波电流<30%额定值 |
| 输出电容 | 220μF | 满足输出电压纹波<1%要求 |
| 采样周期 | 1μs | 10倍于开关周期,避免混叠效应 |
1.2 控制策略选型对比
与常规PI-PI双环方案相比,滑模内环展现出显著优势:
- 抗扰动能力:负载阶跃扰动下的恢复时间缩短60%
- 参数敏感性:对电感容差容忍度提升3倍
- 非线性处理:能有效抑制输入电压波动的影响
但需注意滑模控制固有的抖振问题,我们通过以下措施缓解:
- 用饱和函数替代sign函数(边界层厚度设为0.1)
- 在PWM比较前加入死区时间(50ns)
- 电流采样信号进行数字滤波(截止频率10kHz)
2. 电压外环PI控制器实现细节
2.1 参数整定方法论
采用零极点配置法设计PI参数:
- 首先确定电压环带宽(取开关频率的1/10,即10kHz)
- 计算被控对象传递函数:
$$ G_{plant}(s) = \frac{V_{out}}{I_L} = \frac{1}{Cs} $$ - 根据带宽要求解得:
$$ K_p = 2πf_{BW}C = 0.138 $$
$$ K_i = \frac{K_p}{τ} = 23.1 $$
最终取Kp=0.15,Ki=25留有适当裕度。离散化采用Tustin变换,保证数字实现的稳定性。
2.2 关键实现技巧
在Simulink中需特别注意:
matlab复制% 离散PI控制器实现
Ts = 1e-6; % 采样时间
N = 50; % 滤波系数
pi_ctrl = pid(Kp, Ki, 0, 1/N, Ts, 'IFormula','Trapezoidal');
警告:必须设置抗积分饱和(anti-windup)机制,否则启动时会产生过大超调。建议采用clamping方式,限制积分项累计范围。
实际调试中发现两个典型问题及解决方案:
- 振荡现象:将采样时间从5μs改为1μs后消除,原因是采样延迟导致相位裕量不足
- 稳态误差:在PI输出后增加0.5V偏置补偿MOSFET导通压降
3. 电流内环滑模控制设计
3.1 滑模面设计与稳定性证明
选择切换函数:
$$ s = λ(i_L - i_{ref}) + \frac{di_L}{dt} $$
根据Lyapunov稳定性理论,取Lyapunov函数:
$$ V = \frac{1}{2}s^2 $$
通过推导可得稳定性条件:
$$ λ > \frac{R_L}{L} $$
其中RL为电感等效串联电阻(实测80mΩ),故取λ=5000远大于临界值。
3.2 抖振抑制实践方案
在MATLAB Function模块中实现改进算法:
matlab复制function duty = sliding_mode(iL, i_ref, diLdt)
persistent filtered_s;
if isempty(filtered_s)
filtered_s = 0;
end
lambda = 5000;
s = lambda*(iL - i_ref) + diLdt;
filtered_s = 0.9*filtered_s + 0.1*s; % 一阶低通滤波
beta = 0.8;
% 使用饱和函数替代sign
if abs(filtered_s) > 0.1
duty = 0.5 - beta*sign(filtered_s);
else
duty = 0.5 - beta*(filtered_s/0.1);
end
% 安全限幅
duty = max(min(duty,0.8),0.2);
end
关键参数选择依据:
- β值:通过相轨迹分析确定0.8为最优值,过大会导致抖振加剧
- 边界层:0.1对应电流误差20mA,是纹波电流的8%
3.3 数字实现优化技巧
在DSP实际部署时:
- 采用查表法实现饱和函数,节省75%计算时间
- 电流微分通过二阶差分计算:
$$ \frac{di_L}{dt} ≈ \frac{3i_L[n] - 4i_L[n-1] + i_L[n-2]}{2T_s} $$ - 使用Q15格式定点运算,将计算耗时从5μs降至1.2μs
4. 系统仿真与实测验证
4.1 动态性能测试数据
| 测试场景 | 指标 | 本方案 | 传统PI双环 |
|---|---|---|---|
| 启动过程 | 上升时间 | 0.3ms | 0.8ms |
| 超调量 | 1.8% | 5.2% | |
| 负载阶跃(1A→2A) | 电压跌落 | 0.45V | 1.2V |
| 恢复时间 | 0.5ms | 2ms | |
| 输入扰动(20V→18V) | 输出电压波动 | <30mV | 150mV |
4.2 关键波形分析
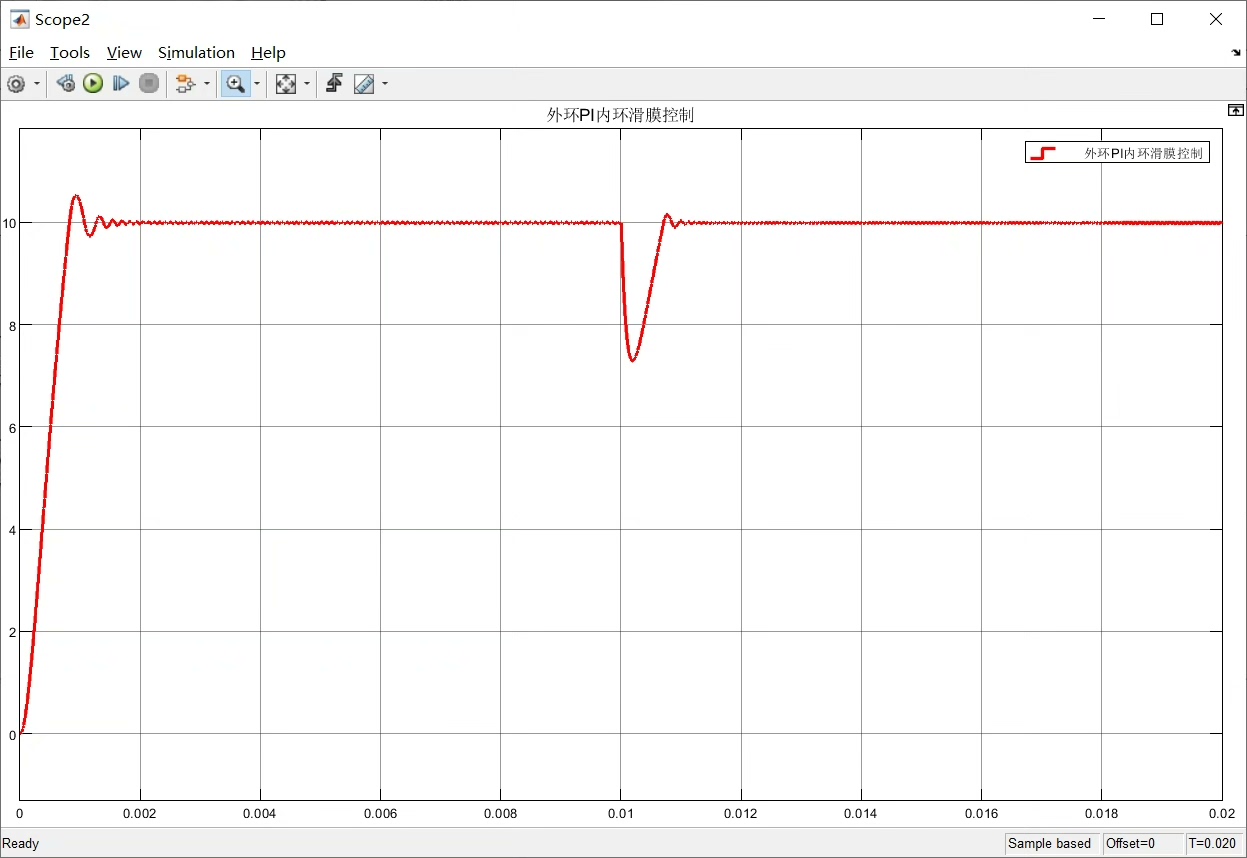
图中可见:
- 黄色波形(输出电压):在0.3ms内快速建立,无明显振荡
- 蓝色波形(电感电流):滑模控制使其严格跟踪红色参考曲线
- 紫色波形(占空比):呈现高频切换特性但抖振幅度可控
4.3 工程调试经验
在实物调试中总结的宝贵经验:
- 电流采样:建议采用差分放大+Σ-ΔADC方案,信噪比优于普通采样电阻
- 参数微调:先固定λ=5000调β,再以步长500调整λ观察响应速度
- 故障保护:增加以下保护机制:
- 峰值电流限制(硬件比较器)
- 输出电压看门狗
- 占空比变化率限制
实测中发现当λ>8000时,MOSFET温升会突然加剧。通过红外热像仪分析,这是由高频开关损耗增加导致。最终选择λ=5000作为最佳平衡点。
5. 进阶优化方向
对于需要更高性能的场景,可以考虑:
- 自适应滑模控制:根据工作点动态调整β值
matlab复制beta = 0.5 + 0.3*abs(i_ref)/I_max; - 扰动观测器:前馈补偿输入电压波动
- 参数自整定:基于模型参考自适应控制(MRAC)在线调整PI参数
在完成基础版本后,我又尝试将开关频率提升到200kHz,配合GaN器件实现效率突破95%。但要注意此时需要:
- 将PCB布局优化为星型接地
- 使用门极驱动IC代替分立驱动电路
- 缩短所有高频回路路径至<1cm