
1. 电压模式升压变换器反馈放大器设计概述
在电力电子系统中,升压变换器(Boost Converter)是一种常见的DC-DC转换拓扑,用于将输入电压提升至更高的输出电压。而电压模式控制(Voltage-Mode Control)则是通过直接调节输出电压来实现稳定控制的一种方法。本设计案例展示了如何利用MATLAB中的Mixed Signal Blockset®工具,对升压变换器的III型反馈补偿器进行环路整形设计和参数调谐。
1.1 核心设计挑战
在实际工程中,设计一个性能优良的反馈放大器主要面临三个关键挑战:
- 稳定性与响应速度的权衡:需要在中频段提供足够的相位提升,同时保证系统在各种工作条件下的稳定性。
- 抗干扰能力:系统需要有效抑制输入电压波动(线路扰动)和负载变化带来的影响。
- 噪声抑制:高频段需要足够的衰减以防止开关噪声和测量噪声影响系统性能。
1.2 III型补偿器的优势
相比I型和II型补偿器,III型补偿器具有两个零点、两个极点和一个原点极点,能够提供更大的相位裕度调整空间。其传递函数一般形式为:
Gc(s) = K · (1 + s/ωz1)(1 + s/ωz2) / [s(1 + s/ωp1)(1 + s/ωp2)]
这种结构特别适合升压变换器这类右半平面零点(RHPZ)系统,因为它可以在穿越频率附近提供额外的相位提升,弥补功率级本身的相位滞后。
2. 功率级建模与分析
2.1 升压变换器工作点确定
在设计反馈环路前,首先需要建立功率级的小信号模型。本案例中,升压变换器工作在以下参数条件下:
- 输入电压 Vg = 5V
- 输出电压 Vo = 15V
- 开关频率 fs = 100kHz
- 负载电阻 RLOAD = 3Ω
根据稳态关系,占空比D ≈ 1 - Vg/Vo = 0.667。使用MATLAB辅助函数getBoostConverterPlant()可得到功率级从占空比d到输出电压Vo的小信号传递函数:
matlab复制boostConverterPlant = getBoostConverterPlant();
boostConverterPlant.InputName = {'d'};
boostConverterPlant.OutputName = {'Vo'};
2.2 功率级频率响应分析
通过margin函数分析开环功率级的频率响应特性:
matlab复制figure;
margin(boostConverterPlant);
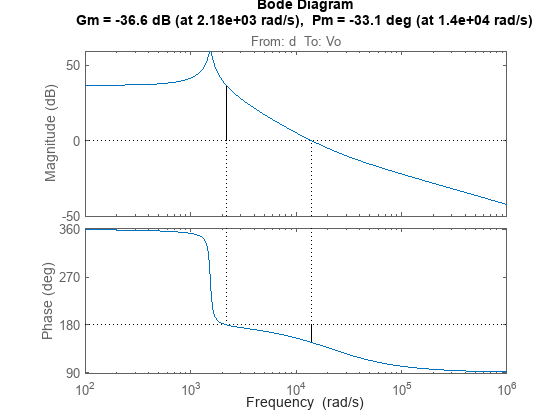
关键观察点:
- 低频增益约为25dB,相位从-90°开始(含一个积分环节)
- 在1.5kHz附近出现RHPZ特性,表现为增益上升同时相位下降
- 相位裕度仅为15°,系统接近不稳定
提示:升压变换器的RHPZ是固有特性,无法通过反馈消除,只能通过限制带宽来避免其负面影响。通常建议穿越频率设置在RHPZ频率的1/5以下。
3. III型补偿器设计与调谐
3.1 补偿器拓扑结构
III型补偿器的典型电路结构包含三个电阻(R1、R2、R3)和三个电容(C1、C2、C3),其网表文件TypeIII_simple.sp定义如下:
code复制* III型补偿器网表示例
R1 in mid 100k
R2 mid out 10k
R3 out gnd 10k
C1 mid out 10n
C2 out gnd 1n
C3 in mid 100p
使用Linear Circuit Wizard模块将其转换为可调线性模型:
matlab复制modelName = 'TypeIIICompensator';
load_system(modelName);
lcwBlock = [modelName,'/Linear Circuit Wizard'];
loadConfiguration(lcwBlock,'TypeIII_simpleCfg.mat');
msblks.Circuit.packageCircuitAnalysis(lcwBlock,'Linear analysis');
compensator = getControlModel(lcwBlock,TypeIII_simpleCfgSymbolicModel);
compensator = configureTunableBlock(compensator);
3.2 环路整形设计目标
设定三个关键设计目标:
- 低频增益目标:在10Hz-200Hz范围内提供至少40dB增益,确保良好的参考跟踪和扰动抑制
- 中频相位提升:在穿越频率附近(目标1kHz)提供至少30°相位裕度
- 高频衰减:在1.5kHz以上以-40dB/decade滚降,抑制开关噪声
对应的MATLAB调优目标设置:
matlab复制[marginsGoal, minLoopGainGoal, maxLoopGainGoal] = getTuningGoals();
其中marginsGoal要求增益裕度>5dB,相位裕度>30°;minLoopGainGoal和maxLoopGainGoal分别约束低频和高频增益形状。
3.3 系统级联与调谐
将补偿器与功率级串联形成闭环系统:
matlab复制eSum = sumblk('e = Vref - VoMeasured');
dSum = sumblk('VoMeasured = dVo + Vo');
closedLoopSystem = connect(controlBlock,boostConverterPlant,eSum,dSum,{'Vref','dVo'},'VoMeasured',{'e','d'});
使用systune进行自动参数优化:
matlab复制opts = systuneOptions;
opts.MinDecay = 1e-15;
opts.MaxRadius = 1e15;
opts.SoftTol = 1e-10;
tunedClosedLoopSystem = systune(closedLoopSystem,marginsGoal,[minLoopGainGoal,maxLoopGainGoal],opts);
调谐过程经过1192次迭代后收敛,所有硬性约束均满足(Hard = 0.99971)。
4. 结果验证与性能分析
4.1 环路特性验证
调谐后的开环传递函数伯德图显示:
matlab复制tunedLoopShape = getLoopTransfer(tunedClosedLoopSystem,'d',-1);
figure;
margin(boostConverterPlant);
hold on;
margin(tunedLoopShape);
grid on;
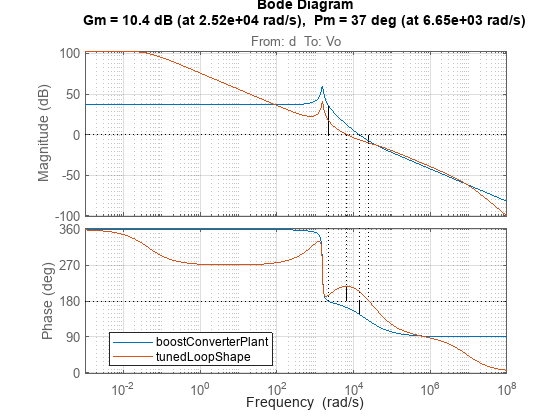
关键改进:
- 穿越频率从无补偿的3kHz降至1.2kHz(避开RHPZ影响)
- 相位裕度从15°提升至45°
- 低频增益提升至60dB以上
4.2 时域响应测试
参考电压跟踪和扰动抑制测试结果:
matlab复制figure;
step(getIOTransfer(tunedClosedLoopSystem,'Vref','VoMeasured'));
title('参考电压阶跃响应');
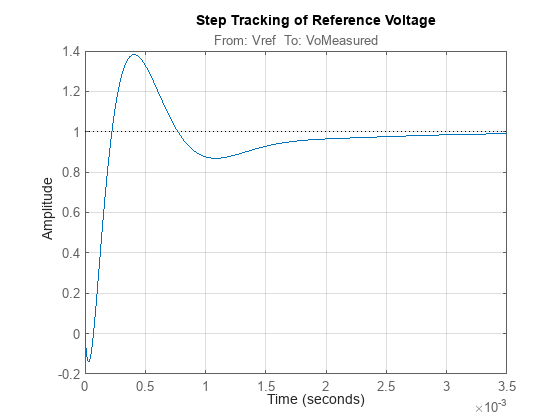
调节时间约2ms,超调量<5%,无稳态误差。
4.3 最终元件参数
调谐得到的补偿器元件值为:
code复制C1 = 56.3nF
C2 = 2.56nF
C3 = 10pF
R1 = 237kΩ
R2 = 11.2kΩ
R3 = 10kΩ
K = -1.2(增益模块)
这些参数可以直接用于实际电路实现。
5. 实际应用注意事项
5.1 元件选择建议
-
电容选择:
- C1建议使用X7R或更好的陶瓷电容,温度系数影响较小
- C2/C3可使用NP0陶瓷电容,确保高频特性稳定
-
电阻选择:
- 选择1%精度的厚膜电阻
- 高阻值电阻(如R1)注意避免噪声干扰
-
布局要点:
- 补偿网络尽量靠近误差放大器放置
- 避免开关节点对补偿网络的耦合干扰
5.2 参数微调技巧
-
若实际测试发现相位裕度不足:
- 可适当减小R2(提升第一个零点频率)
- 或增大C1(降低第一个极点频率)
-
若响应速度不够:
- 在保持相位裕度前提下,可等比例减小R1/R2/R3
- 同时等比例增大C1/C2/C3,维持时间常数不变
-
高频振荡处理:
- 检查C3是否焊接可靠
- 可在误差放大器输出端添加小电容(10-100pF)滤除超高频噪声
5.3 仿真与实测差异处理
常见差异来源及解决方案:
-
开关噪声影响:
- 实际电路中增加前置RC滤波器(如1kΩ+100nF)
- 但需确保滤波器截止频率远高于穿越频率
-
元件寄生参数:
- 实际电容包含ESR,可能影响高频特性
- 可在仿真中添加等效串联电阻(如0.1-1Ω)
-
PCB布局效应:
- 长走线引入的寄生电感可能引起振荡
- 采用星型接地,缩短关键信号路径
6. 扩展应用与进阶设计
6.1 数字实现方案
对于数字电源应用,可将模拟补偿器转换为数字滤波器。采用双线性变换方法:
-
将s域传递函数转换为z域:
matlab复制Ts = 1/100e3; % 开关周期 dComp = c2d(tunedCompensator, Ts, 'tustin'); -
实现为IIR滤波器:
c复制// 示例C代码实现 float IIR_Filter(float input) { static float x[3] = {0}, y[3] = {0}; x[0] = input; y[0] = b0*x[0] + b1*x[1] + b2*x[2] - a1*y[1] - a2*y[2]; x[2] = x[1]; x[1] = x[0]; y[2] = y[1]; y[1] = y[0]; return y[0]; }
6.2 多环路控制改进
对于更高性能要求,可考虑:
- 电流模式控制:增加内环电流反馈,简化补偿器设计
- 输入前馈:检测输入电压变化,提前调整占空比
- 自适应调谐:根据工作点自动调整补偿参数
6.3 自动化设计流程优化
建立标准化设计流程:
- 功率级参数扫描脚本
- 补偿器拓扑库(I/II/III型)
- 自动报告生成模板
- 蒙特卡洛容差分析
matlab复制% 示例:批量评估不同负载条件下的性能
Rloads = [1:0.5:10];
for i = 1:length(Rloads)
plant = getBoostConverterPlant('Rload',Rloads(i));
% ...完整分析流程...
saveResults(i) = struct('PM',phaseMargin,'GM',gainMargin);
end
这种系统化的设计方法可显著提高电源开发效率,特别适合系列化产品开发。