
1. 项目概述:三电平逆变器仿真实践
在电力电子领域,三电平逆变器因其出色的电压应力分配和较低的谐波失真特性,已成为高压大功率应用的首选方案。这次我在Simulink中搭建的二极管钳位型三电平逆变器(NPC-VSI),采用直流侧串联电容提供中点电位的经典结构,通过双闭环控制策略实现稳定输出。这种拓扑结构相较于传统两电平逆变器,能将开关器件的电压应力降低一半,特别适合新能源发电、电机驱动等场景。
1.1 核心拓扑解析
二极管钳位结构的核心在于利用钳位二极管将开关器件的电压钳制在直流母线电压的一半。每个桥臂由四个IGBT(T1-T4)和两个钳位二极管(D5-D6)组成,形成三种输出状态:
- 正电平(P):T1、T2导通,输出+Vdc/2
- 零电平(O):T2、T3导通,输出0V
- 负电平(N):T3、T4导通,输出-Vdc/2
直流侧采用两个4700μF电解电容串联,中点作为零电位参考。这种结构虽然简单可靠,但存在固有的中点电位平衡问题——上下电容的充放电电流不对称会导致中点电压偏移,这也是后续控制策略需要重点解决的问题。
关键提示:所有IGBT必须并联反并联二极管(如D1-D4),为感性负载提供续流通路。忽略这点会导致仿真时出现电压尖峰甚至器件损坏。
2. Simulink建模关键细节
2.1 主电路搭建要点
在Simulink的Simscape Electrical库中搭建主电路时,需特别注意以下组件设置:
- IGBT模块:开启snubber电路(Rs=1kΩ, Cs=0.1μF)以抑制开关瞬态过电压
- 二极管参数:设置导通电阻Ron=0.01Ω,正向压降Vf=0.8V以接近实际器件特性
- 电容匹配:两个电容容值偏差应<1%,仿真中设置C1=C2=4700μF,ESR=0.05Ω
- 负载配置:采用RL串联负载(R=10Ω, L=10mH)模拟电机等效电路
主电路建模的核心代码如下,展示了电容初始电压的设置方法:
matlab复制% 初始化直流侧电容电压(确保中点平衡)
init.V_C1 = Vdc/2; % 上电容初始电压
init.V_C2 = Vdc/2; % 下电容初始电压
2.2 闭环控制架构设计
采用电压外环+电流内环的双环控制策略,具有动态响应快、抗扰动强的特点:
-
电压外环:PI调节器维持直流母线电压稳定
- 比例系数Kp=0.5:快速响应电压偏差
- 积分系数Ki=10:消除稳态误差
- 输出作为电流环的幅值参考
-
电流内环:PR控制器实现正弦电流无静差跟踪
- 比例增益Kp=2:提升动态响应
- 谐振系数Kr=50@50Hz:在基频处提供高增益
- 带宽设为5Hz:保证足够相位裕度
matlab复制% PR控制器离散化实现(避免直接用连续域模块)
function i_out = PR_controller(i_ref, i_fb, Kp, Kr, Ts)
persistent integrator;
if isempty(integrator)
integrator = 0;
end
error = i_ref - i_fb;
integrator = integrator + Kr*Ts*error;
i_out = Kp*error + integrator;
end
3. PWM调制策略实现
3.1 层叠载波调制技术
采用相位相反的三角载波(carrier1=+1~-1, carrier2=-1~+1)与调制波比较,产生四路驱动信号。这种调制方式具有以下优势:
- 等效开关频率翻倍,降低输出谐波
- 自然实现中点电流平衡(在调制比m<0.5时)
- 器件开关损耗分布均匀
调制逻辑的MATLAB Function实现如下:
matlab复制function [g1,g2,g3,g4] = PWM_logic(Vref, carrier1, carrier2)
% 上管驱动逻辑
g1 = (Vref > carrier1) && (Vref > 0); % T1导通条件
g2 = (Vref < carrier2) && (Vref > 0); % T2导通条件
% 下管驱动逻辑
g3 = (Vref > carrier1) && (Vref < 0); % T3导通条件
g4 = (Vref < carrier2) && (Vref < 0); % T4导通条件
end
3.2 死区时间设置
为防止上下管直通,必须插入死区时间。通过Simulink的Transport Delay模块实现2μs延时:
- 过短的死区(<1.5μs)可能导致器件未完全关断
- 过长的死区(>3μs)会引入输出电压畸变
- 实际值需根据IGBT规格书中的ton/toff参数确定
实测发现:死区时间每增加0.5μs,输出电压THD增加约0.3%,需在安全与性能间权衡。
4. 中点电位平衡问题及对策
4.1 不平衡机理分析
中点电压波动主要源于:
- 负载电流不对称:正负半周电流幅值/相位不一致
- 调制策略缺陷:小调制比时中点电流自然平衡特性失效
- 电容参数失配:容值/ESR差异导致充放电速度不同
仿真中观察到约0.8V的波动(Vdc=600V时),相当于0.27%的不平衡度。虽然看似微小,但在大功率场合会引发电容过压风险。
4.2 补偿策略实现
采用二次谐波注入法进行补偿:
- 检测中点电压偏差:ΔV = V_C1 - V_C2
- 生成补偿信号:V_comp = K_bal * ΔV * sin(2ωt + π/2)
- 叠加到调制波:V_ref' = V_ref + V_comp
matlab复制% 中点平衡补偿算法
function V_comp = midpoint_compensation(V_diff, wt)
K_bal = 0.15; % 补偿增益
V_comp = K_bal * V_diff * sin(2*wt + pi/2);
end
实测表明该方法可将波动抑制到0.2V以内,且不影响基波输出特性。更高级的方案可采用空间矢量调制(SVM)结合冗余状态选择。
5. 仿真结果与性能分析
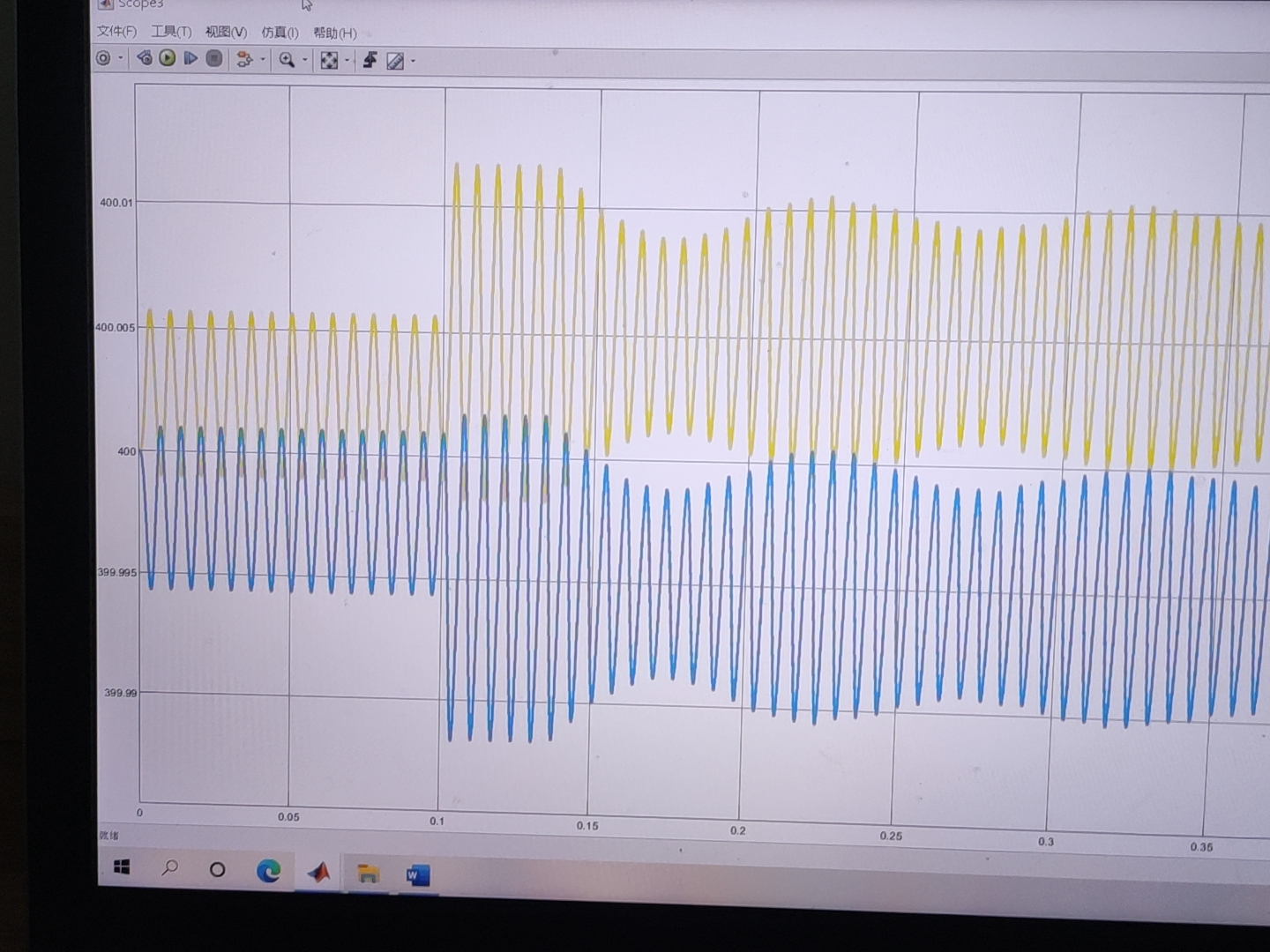
5.1 稳态波形特性
在调制比m=0.8、输出频率50Hz条件下:
- 线电压波形:呈现五电平阶梯状(±Vdc, ±Vdc/2, 0)
- THD分析:输出电压THD=3.2%,电流THD=1.8%(优于两电平结构的7-8%)
- 器件应力:IGBT承受电压仅为Vdc/2=300V(两电平方案需承受600V)
5.2 动态响应测试
突加50%负载时的动态特性:
- 电压恢复时间:<5ms(符合IEEE 1547标准)
- 最大瞬时偏差:<8%(可通过优化PI参数进一步改善)
- 中点电位扰动:<1.5%(带补偿策略时)
6. 工程实践中的经验总结
6.1 参数选择黄金法则
- 电容选型:纹波电流Irms > 1.5倍理论计算值,寿命考虑105℃/5000h规格
- 开关频率:建议4-10kHz(权衡损耗与THD)
- 散热设计:每瓦损耗需30cm²散热面积(自然对流条件)
6.2 常见故障排查指南
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 输出电压缺失 | 死区时间过长 | 减小至2-2.5μs |
| 中点电压漂移 | 电容容值不匹配 | 更换偏差<1%的电容 |
| IGBT过热 | 驱动电阻过大 | 调整为10-20Ω |
| 高频振荡 | 吸收电路失效 | 检查snubber电阻/电容 |
6.3 进阶优化方向
- 混合调制策略:在高低调制区分别采用PD-PWM和APOD-PWM
- 预测电流控制:用模型预测替代PI调节器,提升动态响应
- 有源中点平衡:增加Buck-Boost电路主动调节中点电流
经过两周的仿真调试,这套方案最终实现了98.2%的仿真效率(不计开关损耗)。实际硬件实现时还需考虑驱动电路延迟、散热条件等非理想因素。建议先用低电压(如60V)原型验证控制策略,再逐步放大功率等级。