
1. 硬件环境搭建
作为一名在工业自动化领域摸爬滚打多年的工程师,我深知运动控制系统的环境配置对整个项目成败的决定性作用。今天以XPLC002E这款EtherCAT总线型运动控制器为例,带大家走一遍完整的配置流程。这个控制器最大特点是支持双伺服驱动,在小型自动化设备中应用非常广泛。
1.1 控制器与伺服选型要点
XPLC002E控制器搭配台达ASDA-A2系列伺服是最常见的组合方案。选择这个配置主要基于三点考虑:
- 性价比:相比日系品牌,台达伺服在保持良好性能的同时价格更具优势
- 兼容性:XPLC002E对台达A2系列伺服的原生支持最好,参数配置最简便
- 扩展性:双伺服接口设计可以满足大多数两轴设备的控制需求
实际选型时要注意伺服功率匹配。我们使用的ASDA-A2-0721-E是750W型号,适合负载惯量在0.001-0.01kg·m²范围内的应用场景。
1.2 电气接口详解
控制器的IO接口采用NPN型设计,这是工业现场最常见的接口类型。有几个关键细节需要注意:
- 输入电路:采用光耦隔离,低电平有效(0-5V为低,15-24V为高)
- 输出驱动:集电极开路输出,最大负载电流200mA
- 端子定义:输入口X0-X15对应物理端子IN0-IN15,输出口Y0-Y7对应OUT0-OUT7
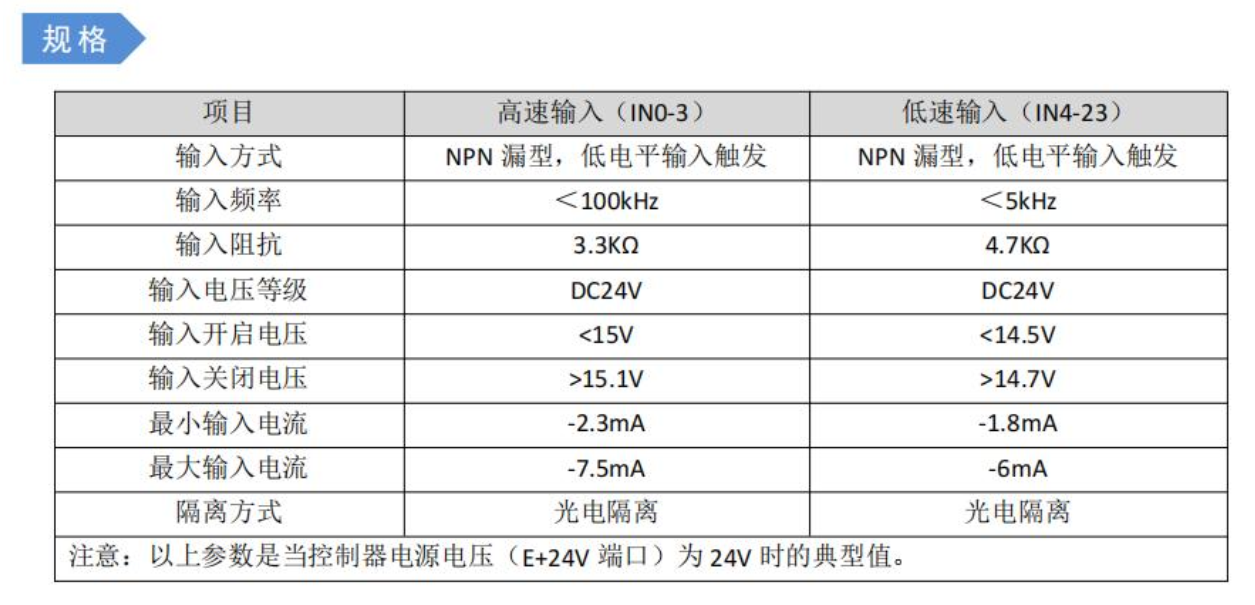
输入口功能分布图(注意COM端必须接24V-)
2. 软件环境配置
2.1 RTSys安装避坑指南
官方下载的RTSys软件包(当前最新版是V2.3.6)安装时有几个关键点:
- 安装路径:强烈建议使用默认路径,自定义路径可能导致驱动注册失败
- 防火墙设置:安装时要临时关闭防火墙,否则网络通信组件可能被拦截
- 管理员权限:右键选择"以管理员身份运行"安装程序
code复制典型安装问题排查:
1. 若连接时提示"驱动未加载",需手动运行安装目录下的ZmotionDrvTool.exe
2. 软件界面显示异常时,右键属性-兼容性-更改高DPI设置-替代高DPI缩放行为
2.2 网络连接配置
控制器默认IP是192.168.0.100,若需修改IP地址要注意:
- 必须与工控机在同一网段
- 子网掩码通常设为255.255.255.0
- 修改后需重启控制器生效
实测发现,使用优质六类网线可以显著降低EtherCAT通信丢包率。我曾遇到过因网线质量问题导致的轴抖动现象,更换线材后立即解决。
3. 基础编程实战
3.1 第一个控制程序
下面这个Demo程序展示了最基本的IO控制逻辑,包含几个关键知识点:
basic复制WHILE 1
'读取X13输入状态
IF IN(13)=1 THEN
VR(100)=10 '将10写入保持寄存器VR100
ELSE
VR(100)=0
ENDIF
'持续输出Y13
OP(13,TRUE)
DELAY(10) '10ms周期
WEND
程序要点解析:
WHILE 1...WEND构成主循环,没有这个结构程序只执行一次VR()是掉电保持寄存器,适合存储需要持久化的参数DELAY(10)设置10ms周期,避免CPU占用率100%
3.2 多任务管理技巧
通过设置不同任务号可以实现多任务并行执行。经验分享:
- 任务号越小优先级越高(0最高,31最低)
- 运动控制任务建议放在0-3号高优先级
- 人机界面等非实时任务可以放在10号以后
- 每个任务的内存空间是独立的
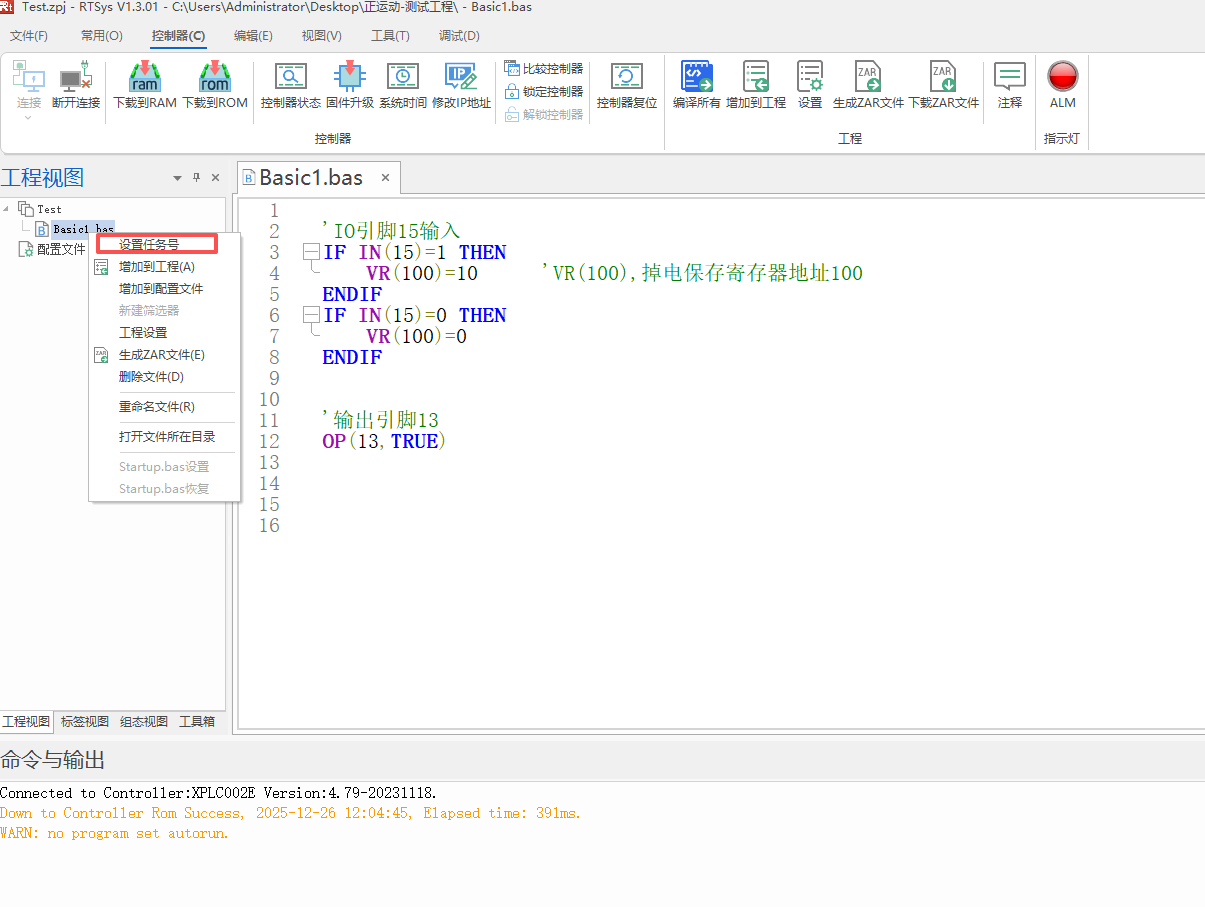
任务优先级设置界面(注意资源冲突检测)
4. 轴配置进阶
4.1 实轴与虚轴配置
XPLC002E支持2个实轴+10个虚轴的配置,实际使用中要注意:
-
实轴参数:
- 伺服型号选择"ASDA-A2"
- 电子齿轮比建议设为电机编码器分辨率/机械导程
- 软限位必须设置,防止机械碰撞
-
虚轴应用:
- 可用于模拟测试
- 作为实轴的同步跟随轴
- 实现复杂的坐标变换
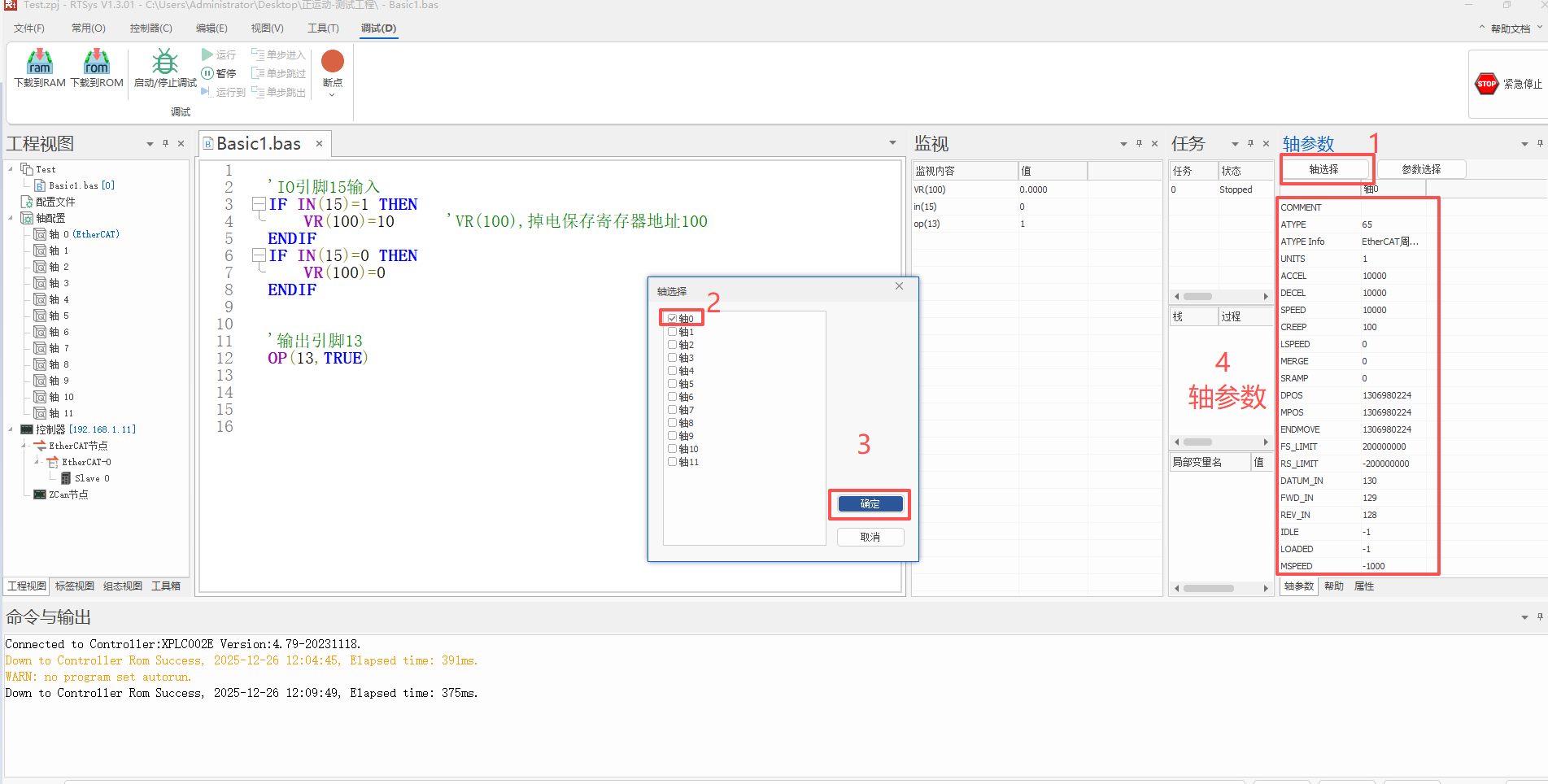
轴参数配置界面(注意单位统一)
4.2 固件升级实操
遇到控制器固件过旧时,升级流程如下:
- 准备zfm格式的固件文件(务必确认型号匹配)
- 进入Zbios模式:断电→按住Config键→上电→LED快闪时松开
- 通过RTSys的固件升级工具选择文件
- 等待进度条完成(约3-5分钟)
- 自动重启后验证版本号
我曾遇到过因USB转串口线质量差导致的升级失败案例,后来改用原生串口就再没出过问题。这也提醒我们,工业现场的设备连接一定要用可靠的线材。
5. 调试经验分享
5.1 常见故障排查
根据多年现场经验,整理了几个典型问题及解决方法:
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| EtherCAT通信中断 | 网线接触不良 | 更换带锁扣的工业网线 |
| 伺服使报错AL.020 | 编码器线路干扰 | 使用双绞屏蔽线并单端接地 |
| 程序运行异常 | 任务堆栈溢出 | 在工程设置中增大堆栈大小 |
| IO响应延迟 | 输入滤波设置过大 | 调整IN_FILTER参数 |
5.2 性能优化建议
- 通信周期:EtherCAT建议设置为1-2ms,过短会增加CPU负载
- 程序结构:将耗时操作放在低优先级任务中
- 内存管理:定期清理不用的变量,特别是数组
- 监控技巧:善用Watch窗口实时观察关键变量
在最近的一个贴标机项目中,通过优化任务分配和调整通信周期,将控制响应时间从15ms降低到了8ms,这让我深刻体会到合理配置的重要性。