
1. EXTI外部中断基础解析
1.1 外部中断的核心概念
EXTI(External Interrupt/Event Controller)是STM32微控制器中用于管理外部中断和事件的专用外设。作为嵌入式系统响应外部信号的关键机制,它能够实时监测GPIO引脚的电平变化,并在满足触发条件时向NVIC(嵌套向量中断控制器)发出中断请求。
在实际工程中,EXTI的典型应用场景包括:
- 按键检测(机械按键消抖处理)
- 限位开关状态监测
- 传感器信号边沿捕获
- 低功耗模式下的唤醒源
1.2 触发方式详解
1.2.1 边沿触发机制
边沿触发是EXTI最常用的工作模式,具体分为三种类型:
-
上升沿触发(Rising Edge):
- 触发条件:GPIO电平从逻辑0(低电平)跳变到逻辑1(高电平)
- 典型应用:检测按钮释放动作、正脉冲信号捕获
- 电气特性:STM32定义的电压阈值通常为0.7VDD(如3.3V供电时约2.31V)
-
下降沿触发(Falling Edge):
- 触发条件:GPIO电平从逻辑1跳变到逻辑0
- 典型应用:检测按钮按下动作、负脉冲信号捕获
- 电气特性:触发阈值通常为0.3VDD(3.3V供电时约0.99V)
-
双边沿触发(Rising/Falling Edge):
- 同时检测上升沿和下降沿
- 适用场景:需要同时捕获信号正负跳变的场合,如PWM占空比测量
硬件设计提示:
使用边沿触发时,必须确保GPIO引脚有明确的上拉/下拉电阻配置:
- 按键检测推荐配置:内部上拉+下降沿触发
- 开漏输出信号推荐:外部上拉+下降沿触发
1.2.2 软件触发机制
软件触发是通过直接写EXTI寄存器来模拟中断事件,主要用途包括:
- 调试时手动触发中断流程
- 系统自检时模拟外部事件
- 多任务间同步操作
软件触发实现代码示例:
c复制__HAL_GPIO_EXTI_GENERATE_SWIT(GPIO_PIN_x); // 产生指定引脚的中断
1.3 通道资源分配
STM32的EXTI控制器具有以下通道特性:
| 通道类型 | 数量 | 复用情况 |
|---|---|---|
| GPIO引脚 | 16 | PA0-PA15共享EXTI0-EXTI15 |
| 专用外设事件 | 6 | PVD/RTC/USB等 |
| 保留 | 10 | 芯片特定功能 |
关键限制规则:
- 相同Pin编号的GPIO不能同时使用(如PA0和PB0冲突)
- EXTI4-EXTI9共用一个中断向量(需在ISR内检查标志位)
- EXTI10-EXTI15共用一个中断向量
2. EXTI硬件架构深度剖析
2.1 信号路径分析
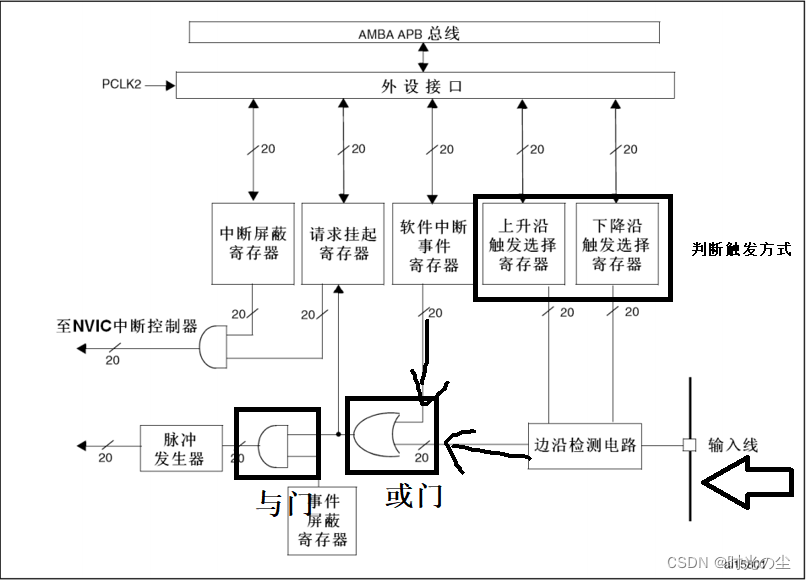
EXTI的完整信号处理流程包含三个关键阶段:
-
信号检测层:
- 通过GPIO端口监测物理电平
- 经过施密特触发器消除噪声
- 边沿检测电路生成中断脉冲
-
中断管理层:
- 中断屏蔽寄存器(IMR)控制使能
- 挂起寄存器(PR)记录触发状态
- 通过NVIC进行优先级仲裁
-
事件生成层:
- 事件屏蔽寄存器(EMR)控制使能
- 直接触发其他外设(如ADC/DMA)
2.2 AFIO配置关键点
当使用GPIO作为EXTI源时,必须通过AFIO(Alternate Function I/O)进行引脚映射:
c复制__HAL_AFIO_REMAP_EXTI_ENABLE(); // 使能AFIO时钟
__HAL_AFIO_EXTICFG_SET(GPIOx, GPIO_PIN_x); // 配置具体映射
配置注意事项:
- 必须先使能GPIO和AFIO时钟
- 同一时刻每个EXTI线只能映射到一个GPIO端口
- 高功耗模式下可能需要额外配置
3. 中断优先级实战配置
3.1 NVIC优先级分组
STM32采用4位优先级分组策略,通过SCB->AIRCR寄存器配置:
c复制HAL_NVIC_SetPriorityGrouping(NVIC_PRIORITYGROUP_4); // 4位抢占优先级
推荐分组方案:
- 简单系统:Group 4(全抢占优先级)
- 复杂系统:Group 3(3位抢占+1位响应)
3.2 中断优先级设置
EXTI0中断配置示例:
c复制HAL_NVIC_SetPriority(EXTI0_IRQn, 2, 0); // 抢占优先级2,响应优先级0
HAL_NVIC_EnableIRQ(EXTI0_IRQn); // 使能中断
优先级冲突处理原则:
- 高频中断设置更高优先级(抢占数值更小)
- 实时性要求高的外设优先
- 避免优先级反转问题
4. CubeMX工程配置指南
4.1 GPIO模式选择策略
CubeMX中GPIO模式选项与EXTI的对应关系:
| CubeMX选项 | 实际功能 |
|---|---|
| GPIO_MODE_IT_RISING | 上升沿中断 |
| GPIO_MODE_IT_FALLING | 下降沿中断 |
| GPIO_MODE_IT_RISING_FALLING | 双边沿中断 |
| GPIO_MODE_EVT_RISING | 上升沿事件 |
| GPIO_MODE_EVT_FALLING | 下降沿事件 |
配置建议:
- 按键检测:IT_FALLING + 内部上拉
- 脉冲计数:IT_RISING_FALLING + 无上下拉
- 低功耗唤醒:EVT_RISING + 外部下拉
4.2 时钟树配置要点
确保以下时钟源已使能:
- GPIO端口时钟(__HAL_RCC_GPIOx_CLK_ENABLE)
- AFIO时钟(__HAL_RCC_AFIO_CLK_ENABLE)
- SYSCFG时钟(部分系列需要)
5. 中断服务程序开发实践
5.1 标准中断处理流程
c复制void EXTI0_IRQHandler(void)
{
/* 1. 清除中断标志 */
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
/* 2. 用户处理代码 */
// 避免耗时操作
}
5.2 回调函数最佳实践
推荐的中断回调实现方式:
c复制void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
static uint32_t lastTick = 0;
uint32_t currentTick = HAL_GetTick();
/* 软件消抖处理 */
if((currentTick - lastTick) > 50) {
switch(GPIO_Pin) {
case KEY1_Pin:
// 处理按键动作
break;
case SENSOR_Pin:
// 处理传感器信号
break;
}
}
lastTick = currentTick;
}
关键优化技巧:
- 添加时间戳实现软件消抖
- 使用switch-case处理多引脚中断
- 避免在中断内调用阻塞函数
6. 常见问题排查手册
6.1 中断不触发排查步骤
-
检查项:GPIO时钟是否使能
c复制
__HAL_RCC_GPIOA_CLK_ENABLE(); -
检查项:AFIO/SYSCFG时钟使能
c复制
__HAL_RCC_AFIO_CLK_ENABLE(); -
检查项:NVIC中断使能
c复制
HAL_NVIC_EnableIRQ(EXTI0_IRQn); -
检查项:GPIO模式配置
c复制
GPIO_InitStruct.Mode = GPIO_MODE_IT_FALLING;
6.2 中断频繁误触发处理
解决方案:
-
硬件滤波:
- 增加RC滤波电路(典型值:R=10kΩ, C=0.1μF)
- 使用施密特触发器芯片
-
软件优化:
c复制void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) { static uint8_t stableCount = 0; if(HAL_GPIO_ReadPin(GPIOA, GPIO_Pin) == GPIO_PIN_RESET) { if(++stableCount > 3) { // 确认稳定低电平 stableCount = 0; } } else { stableCount = 0; } }
7. 进阶应用技巧
7.1 中断与DMA协同工作
典型应用场景:
- 外部触发ADC采样
- 事件触发DMA传输
配置示例:
c复制// CubeMX中配置:
// 1. EXTI线设置为事件模式
// 2. 启用ADC的EXTI触发
// 3. 配置DMA通道
// 代码中启动传输
HAL_ADC_Start_DMA(&hadc, buffer, length);
7.2 低功耗模式下的EXTI应用
唤醒配置流程:
- 配置GPIO为模拟输入(最低功耗)
- 设置EXTI为事件模式
- 配置唤醒事件:
c复制
HAL_PWR_EnableWakeUpPin(PWR_WAKEUP_PIN1); __HAL_PWR_CLEAR_FLAG(PWR_FLAG_WU); - 进入低功耗模式:
c复制
HAL_PWR_EnterSTOPMode(PWR_LOWPOWERREGULATOR_ON, PWR_STOPENTRY_WFI);
实测数据(STM32L4系列):
- STOP模式+EXTI唤醒:功耗可降至1.5μA
- 唤醒延迟:约5μs