
1. 项目概述
在嵌入式Linux开发中,设备树(Device Tree)已经成为现代Linux内核管理硬件资源的标准方式。相比传统的板级支持包(BSP)方式,设备树提供了更加灵活和可维护的硬件描述方案。本次实验基于i.MX6ULL处理器,通过设备树方式实现LED驱动开发,展示了从设备树节点定义到驱动开发的完整流程。
作为嵌入式Linux开发者,掌握设备树驱动开发是必备技能。设备树驱动相比传统驱动具有明显优势:硬件配置与驱动代码分离,同一驱动可适配不同硬件平台,只需修改设备树而无需重新编译驱动。本次实验虽然以简单的LED控制为例,但涉及的技术点涵盖了设备树驱动开发的核心内容。
2. 硬件环境搭建
2.1 开发板选型与硬件连接
实验采用i.MX6ULL处理器开发板,具体型号为I.MX6U-ALPHA。该开发板具有丰富的外设接口和适中的处理能力,非常适合嵌入式Linux学习和开发。LED硬件连接原理图如下:
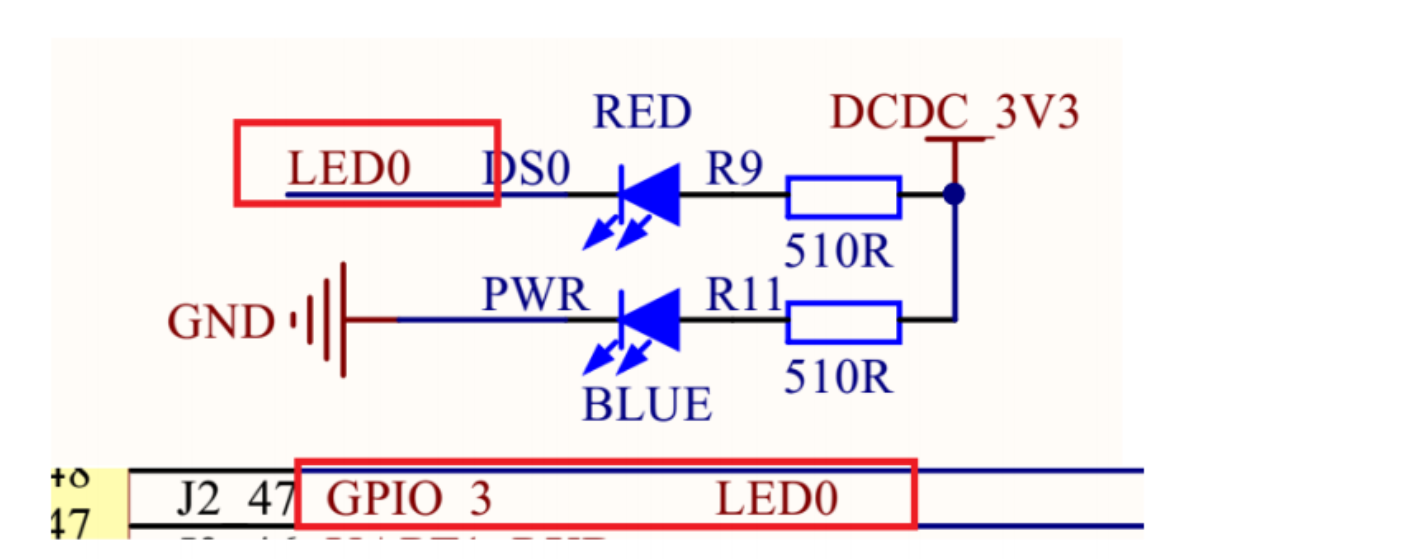
从原理图可以看出,LED0连接至GPIO1_IO03引脚。当GPIO输出低电平时LED导通发光,高电平时LED熄灭。这种连接方式是嵌入式系统中最常见的LED驱动电路,具有电路简单、可靠性高的特点。
2.2 开发环境配置
实验在Ubuntu 20.04 LTS系统下进行,需要准备以下开发环境:
- 交叉编译工具链:arm-linux-gnueabihf-
- Linux内核源码:linux-imx-rel_imx_4.1.15_2.1.1_ga_alientek_v2.2
- NFS网络文件系统:用于调试和文件共享
- 串口调试工具:minicom或picocom
环境配置关键点:
- 交叉编译器路径需加入PATH环境变量
- 内核源码需正确配置为i.MX6ULL平台
- NFS共享目录权限需正确设置
3. 设备树节点定义
3.1 设备树基础知识
设备树是一种描述硬件资源的数据结构,采用树形结构组织。主要组成部分包括:
- 节点(Node):描述一个设备或总线
- 属性(Property):描述节点的特征和配置
- 值(Value):属性的具体取值
设备树源文件(.dts)编译后生成二进制文件(.dtb),由bootloader传递给内核。内核解析设备树后生成/proc/device-tree虚拟文件系统,驱动可通过OF接口访问设备树信息。
3.2 LED节点定义实现
在imx6ull-alientek-emmc.dts文件的根节点下添加alphaled子节点:
dts复制alphaled {
#address-cells = <1>;
#size-cells = <1>;
compatible = "atkalpha-led";
status = "okay";
reg = <
0x020C406C 0x04 /* CCM_CCGR1_BASE */
0x020E0068 0x04 /* SW_MUX_GPIO1_IO03_BASE */
0x020E02F4 0x04 /* SW_PAD_GPIO1_IO03_BASE */
0x0209C000 0x04 /* GPIO1_DR_BASE */
0x0209C004 0x04 >; /* GPIO1_GDIR_BASE */
};
节点属性解析:
#address-cells和#size-cells:指定reg属性中地址和长度的cell数量compatible:驱动匹配字符串status:设备状态,"okay"表示启用reg:寄存器地址和长度对,共5组寄存器
设备树编译命令:
bash复制make dtbs
编译生成imx6ull-alientek-emmc.dtb文件,需确保该文件被bootloader加载。
4. 驱动程序设计
4.1 驱动框架搭建
LED驱动采用标准的字符设备框架,主要包含以下组成部分:
- 设备结构体:管理设备号、cdev、设备节点等
- 文件操作集合:实现open、read、write等操作
- 模块初始化和退出函数
- 设备树处理接口
驱动核心结构体定义:
c复制struct dtsled_dev {
dev_t devid; /* 设备号 */
struct cdev cdev; /* cdev结构体 */
struct class *class; /* 设备类 */
struct device *device; /* 设备实例 */
int major; /* 主设备号 */
int minor; /* 次设备号 */
struct device_node *nd; /* 设备树节点 */
};
4.2 设备树接口实现
驱动通过OF(Open Firmware)接口从设备树获取硬件信息,主要使用以下函数:
of_find_node_by_path():通过路径查找设备树节点of_find_property():获取节点属性of_property_read_string():读取字符串属性of_property_read_u32_array():读取32位数组属性of_iomap():寄存器地址映射
设备树信息获取示例:
c复制/* 获取设备节点 */
dtsled.nd = of_find_node_by_path("/alphaled");
if(dtsled.nd == NULL) {
printk("alphaled node not find!\n");
return -EINVAL;
}
/* 获取compatible属性 */
proper = of_find_property(dtsled.nd, "compatible", NULL);
if(proper) {
printk("compatible = %s\n", (char*)proper->value);
}
/* 获取reg属性并映射寄存器 */
IMX6U_CCM_CCGR1 = of_iomap(dtsled.nd, 0);
SW_MUX_GPIO1_IO03 = of_iomap(dtsled.nd, 1);
4.3 GPIO控制实现
LED驱动需要完成GPIO的初始化和控制:
- 使能GPIO时钟
- 设置GPIO复用功能
- 配置GPIO电气属性
- 设置GPIO方向
- 实现GPIO输出控制
GPIO初始化关键代码:
c复制/* 使能GPIO1时钟 */
val = readl(IMX6U_CCM_CCGR1);
val &= ~(3 << 26); /* 清除以前的设置 */
val |= (3 << 26); /* 设置新值 */
writel(val, IMX6U_CCM_CCGR1);
/* 设置GPIO1_IO03复用功能 */
writel(5, SW_MUX_GPIO1_IO03);
/* 配置GPIO电气属性 */
writel(0x10B0, SW_PAD_GPIO1_IO03);
/* 设置GPIO方向为输出 */
val = readl(GPIO1_GDIR);
val |= (1 << 3); /* 设置为输出 */
writel(val, GPIO1_GDIR);
LED控制函数:
c复制void led_switch(u8 sta)
{
u32 val = readl(GPIO1_DR);
if(sta == LEDON) {
val &= ~(1 << 3); /* 输出低电平,LED亮 */
} else {
val |= (1 << 3); /* 输出高电平,LED灭 */
}
writel(val, GPIO1_DR);
}
5. 测试应用程序开发
5.1 测试APP设计
测试APP通过文件操作接口控制LED设备,主要功能:
- 打开LED设备文件
- 写入控制命令(1开/0关)
- 关闭设备文件
测试APP核心代码:
c复制int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
unsigned char databuf[1];
if(argc != 3){
printf("Usage: %s <device> <0|1>\n", argv[0]);
return -1;
}
filename = argv[1];
fd = open(filename, O_RDWR);
if(fd < 0){
printf("file %s open failed!\n", argv[1]);
return -1;
}
databuf[0] = atoi(argv[2]); /* 获取控制命令 */
retvalue = write(fd, databuf, sizeof(databuf));
if(retvalue < 0){
printf("LED Control Failed!\n");
close(fd);
return -1;
}
close(fd);
return 0;
}
5.2 编译与部署
测试APP交叉编译命令:
bash复制arm-linux-gnueabihf-gcc ledApp.c -o ledApp
文件部署步骤:
- 将驱动模块dtsled.ko拷贝到开发板/lib/modules/4.1.15/
- 将测试程序ledApp拷贝到开发板可执行路径
- 加载驱动模块:
bash复制
depmod modprobe dtsled.ko - 测试LED控制:
bash复制./ledApp /dev/dtsled 1 # 打开LED ./ledApp /dev/dtsled 0 # 关闭LED
6. 调试与问题排查
6.1 常见问题及解决方案
-
设备树节点未生效
- 检查设备树文件是否正确修改
- 确认编译后的dtb文件已更新到启动分区
- 在/proc/device-tree下查看节点是否存在
-
驱动加载失败
- 检查内核日志(dmesg)中的错误信息
- 确认设备树compatible属性与驱动匹配
- 检查寄存器地址映射是否成功
-
LED不响应控制
- 用万用表测量GPIO电压,确认硬件连接
- 检查GPIO方向寄存器配置
- 确认时钟使能寄存器设置正确
-
测试APP无法打开设备
- 检查/dev下设备节点是否存在
- 确认设备文件权限设置正确
- 检查驱动是否成功注册设备号
6.2 调试技巧
-
内核打印调试
c复制printk(KERN_DEBUG "Debug message: val=0x%x\n", val); -
寄存器内容查看
c复制val = readl(IMX6U_CCM_CCGR1); printk("CCM_CCGR1 = 0x%08x\n", val); -
设备树信息检查
bash复制# 查看设备树节点 ls /proc/device-tree/alphaled # 查看设备树属性 hexdump -C /proc/device-tree/alphaled/reg -
GPIO状态监控
bash复制# 查看GPIO状态 cat /sys/kernel/debug/gpio
7. 进阶优化方向
7.1 驱动改进建议
-
添加设备树属性解析
- 增加LED极性控制属性(active-high/active-low)
- 支持多个LED控制
- 添加默认状态配置
-
增强错误处理
- 检查设备树属性是否存在
- 验证寄存器映射是否成功
- 添加资源释放错误处理
-
性能优化
- 实现GPIO子系统接口
- 支持中断驱动方式
- 添加电源管理支持
7.2 扩展功能实现
-
用户空间控制接口
bash复制# 通过sysfs控制LED echo 1 > /sys/class/leds/alphaled/brightness -
闪烁模式支持
c复制// 添加IOCTL接口支持闪烁控制 #define LED_SET_BLINK _IOW('L', 1, struct blink_param) -
触发条件配置
- 支持心跳灯、定时闪烁等触发条件
- 实现netdev、mmc等设备触发器
8. 经验总结
在实际开发过程中,设备树驱动开发需要注意以下几点:
-
设备树与驱动匹配
- compatible属性必须与驱动中的匹配表一致
- 设备树节点路径需与驱动查找路径匹配
- 属性命名应遵循标准约定
-
寄存器操作规范
- 使用ioremap映射寄存器空间
- 通过readl/writel访问寄存器
- 注意寄存器位域的原子操作
-
资源管理
- 模块退出时释放所有资源
- 错误处理路径需释放已申请资源
- 使用devm_系列函数自动管理资源
-
调试技巧
- 善用内核打印信息
- 通过/proc和/sys接口获取状态信息
- 使用示波器验证GPIO信号
通过本次LED驱动实验,我们完整实践了设备树驱动的开发流程,掌握了从设备树定义到驱动实现的各个环节。这种开发模式在现代嵌入式Linux系统中已经成为标准做法,值得深入学习和掌握。