
1. 发动机转速控制系统概述
在工业控制领域,PID控制器是最基础也是最广泛应用的控制器类型之一。本文将以发动机转速控制为案例,详细介绍如何使用MATLAB的looptune工具进行反馈回路自动调参。这个案例虽然看似简单,但包含了控制系统设计的核心要素:被控对象建模、控制器结构选择、性能指标设定以及参数自动优化。
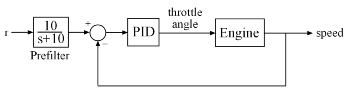
发动机转速控制系统的基本结构如下图所示。系统输入是期望转速(通过阶跃信号模拟),输出是实际转速,控制器通过调节油门开度来控制发动机转速。这种单回路反馈结构在工业中非常常见,理解其调参方法具有普遍参考价值。
2. 系统建模与初始分析
2.1 发动机动态模型
我们使用的发动机模型是一个四阶传递函数,通过MATLAB的rctExamples工具箱提供。在控制系统设计中,准确理解被控对象的动态特性至关重要。通过伯德图分析,我们可以直观地了解发动机的频率响应特性。
matlab复制load rctExamples Engine
bode(Engine)
grid
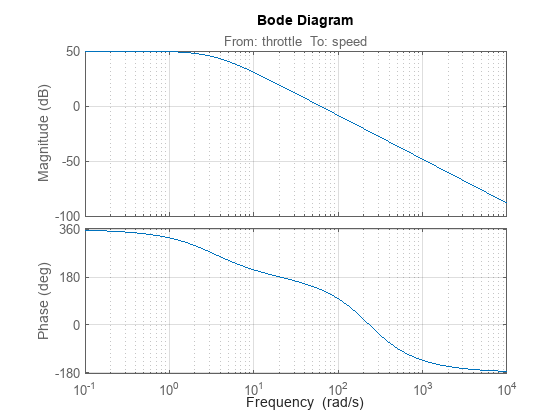
从伯德图可以看出,发动机在低频段增益较高,随着频率增加增益逐渐下降,相位滞后也逐渐增大。这种特性在机械系统中很常见,也提示我们需要在控制器设计中考虑相位补偿。
2.2 PID控制器参数化
在MATLAB中,我们使用tunablePID对象来创建可调参数的PID控制器:
matlab复制PID0 = tunablePID('SpeedController','pid')
这个PID控制器的传递函数形式为:
code复制Kp + Ki*(1/s) + Kd*(s/(Tf*s+1))
其中包含四个可调参数:
- Kp:比例增益
- Ki:积分增益
- Kd:微分增益
- Tf:微分滤波器时间常数
注意:实际工业应用中,微分环节通常会加入滤波器(Tf参数)以避免高频噪声被放大。这是PID实现中的一个重要细节。
3. 控制系统构建与调参
3.1 完整控制回路搭建
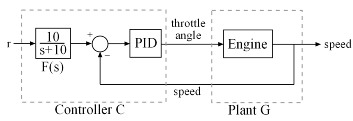
控制系统除了PID控制器外,还包含一个前置滤波器F,用于平滑参考输入信号。完整的控制结构如下图所示:
在MATLAB中构建这个系统需要明确定义各个模块的输入输出名称:
matlab复制F = tf(10,[1 10]); % 前置滤波器
G = Engine;
G.InputName = 'throttle';
G.OutputName = 'speed';
C0 = PID0 * [F , -1];
C0.InputName = {'r','speed'};
C0.OutputName = 'throttle';
这种命名方式清晰地定义了信号流向,是构建复杂控制系统时的良好实践。
3.2 使用looptune进行自动调参
looptune的核心思想是自动优化控制器参数以满足性能要求。对于这个转速控制系统,我们主要关注两个性能指标:
- 阶跃响应稳定时间不超过5秒
- 超调量尽可能小
这些时域指标可以转换为频域要求:开环增益穿越频率约为1 rad/s(对应5秒的稳定时间)。looptune会自动考虑其他隐含要求,如足够的相位裕度、高频滚降等。
matlab复制wc = 1; % 目标增益穿越频率
[~,C,~,Info] = looptune(G,C0,wc);
调参完成后,我们可以查看优化后的PID参数:
matlab复制PIDT = getBlockValue(C,'SpeedController')
典型的优化结果可能如下:
- Kp = 0.000855
- Ki = 0.00269
- Kd = -7.83e-05
- Tf = 0.877
实操心得:虽然微分增益Kd的绝对值很小,但不应直接设为零。微小的微分作用可以帮助改善系统动态响应,特别是在存在测量噪声的情况下。
4. 性能验证与分析
4.1 回路特性分析
使用loopview可以直观地评估调参结果:
matlab复制loopview(G,C,Info)
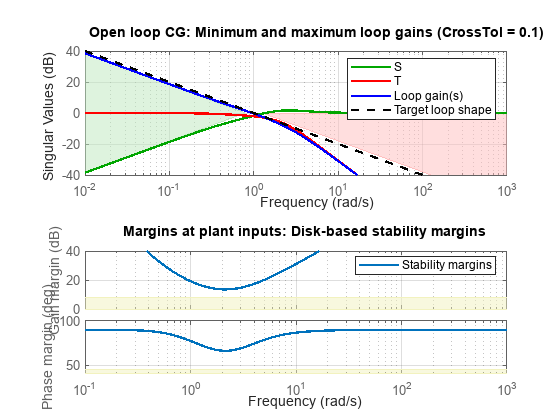
这个视图展示了几个关键信息:
- 开环传递函数的幅频和相频特性
- 灵敏度函数和互补灵敏度函数
- 稳定裕度指标
特别要注意的是,实际增益穿越频率(0.928 rad/s)略低于目标值(1 rad/s),但仍在可接受范围内,且保证了足够的稳定裕度。
4.2 时域响应验证
最终的闭环阶跃响应验证是必不可少的步骤:
matlab复制T = connect(G,C,'r','speed');
step(T)
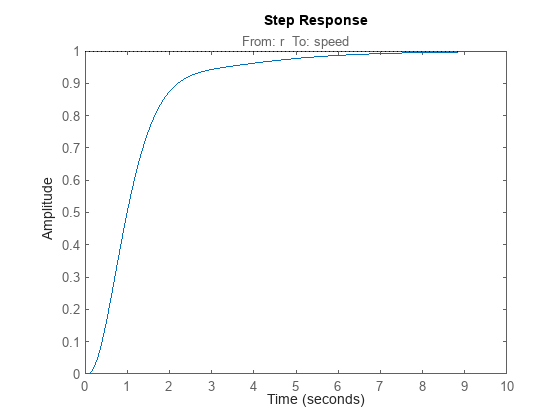
从响应曲线可以看出,系统满足设计要求:
- 稳定时间约4.5秒(小于5秒要求)
- 超调量几乎为零
- 稳态误差为零(得益于积分作用)
5. 工程实践中的注意事项
5.1 参数敏感性分析
在实际工程中,我们需要考虑参数变化的鲁棒性。可以通过以下方法进行简单测试:
matlab复制% 测试±20%参数变化的影响
Kp_range = PIDT.Kp * [0.8 1.2];
Ki_range = PIDT.Ki * [0.8 1.2];
这种分析可以帮助我们了解系统对参数变化的敏感程度,确保在实际运行中的可靠性。
5.2 噪声抑制考虑
虽然本例中没有明确考虑测量噪声,但实际系统中总是存在一定噪声。我们可以通过增加以下分析来评估系统的噪声抑制能力:
matlab复制% 评估测量噪声到控制输出的传递函数
S = connect(G,C,'speed','throttle');
bode(S)
这个传递函数展示了系统对测量噪声的放大程度,特别是在高频段。如果发现噪声放大严重,可能需要调整微分滤波器参数Tf。
5.3 实时实现考虑
当将设计好的控制器部署到实时系统时,还需要考虑:
- 离散化方法(如Tustin变换)和采样周期选择
- 防止积分饱和的抗饱和措施
- 输出限幅保护
这些工程细节往往决定了控制系统在实际中的表现。
6. 扩展应用与进阶技巧
6.1 多回路系统解耦
虽然本例是单回路系统,但looptune同样适用于多输入多输出(MIMO)系统。例如在"蒸馏塔的解耦控制器"案例中,looptune可以自动设计解耦控制器,处理多个相互耦合的控制变量。
6.2 自定义性能指标
除了基本的带宽要求外,looptune支持用户自定义更复杂的性能指标,如:
- 特定频段的增益限制
- 干扰抑制要求
- 控制量幅值限制
这些高级功能可以通过TuningGoal对象来实现。
6.3 与其他工具的对比
与传统的PID调参方法(如Ziegler-Nichols)相比,looptune具有以下优势:
- 自动考虑多种性能指标的平衡
- 可以处理更复杂的控制器结构
- 提供系统的稳定裕度保证
然而,对于特别简单的系统,传统方法可能更快捷。工程师应根据具体情况选择合适的方法。