
1. GPIO输出模式基础解析
在嵌入式硬件设计中,GPIO(通用输入输出)是最基础也是最关键的接口之一。理解GPIO的不同工作模式对硬件工程师来说至关重要,这直接关系到电路设计的可靠性和性能表现。
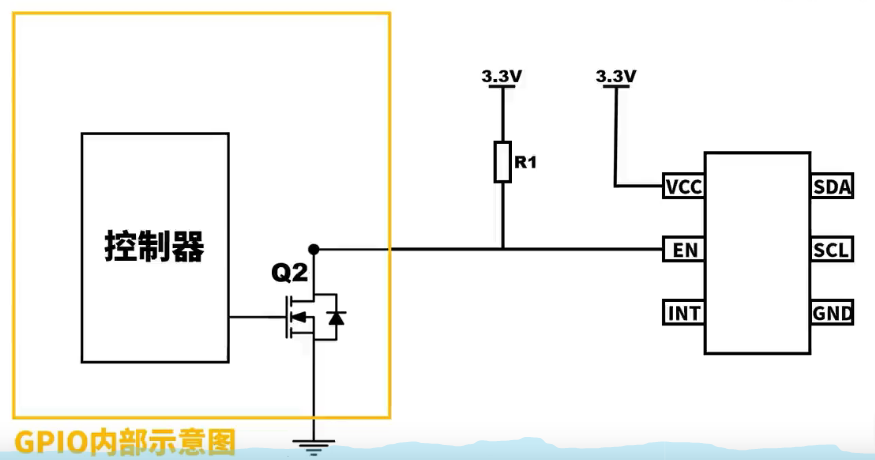
1.1 GPIO内部结构解析
典型的GPIO内部结构由两个MOS管组成(Q1和Q2),这种设计被称为"图腾柱"结构。Q1连接电源(VCC),Q2连接地(GND),两个MOS管的漏极(Drain)共同连接到芯片引脚。这种结构可以实现四种工作状态:
- Q1导通,Q2截止:输出引脚被拉至高电平(VCC)
- Q1截止,Q2导通:输出引脚被拉至低电平(GND)
- 双截止状态:输出引脚呈现高阻态(悬空)
- 双导通状态:电源直接对地短路(必须避免的危险状态)
注意:实际设计中会加入保护电路防止双导通情况发生,但作为设计者仍需在软件配置时避免这种状态。
1.2 输出模式基本概念
GPIO输出主要有两种工作模式:
- 推挽输出(Push-Pull)
- 开漏输出(Open-Drain)
这两种模式的选择取决于具体的应用场景和电路设计要求。推挽输出提供完整的驱动能力,而开漏输出则提供了更大的设计灵活性。
2. 推挽输出模式详解
2.1 推挽工作原理
推挽输出模式下,GPIO可以主动输出高电平和低电平。当输出高电平时,上管Q1导通,电流从芯片内部流出(推);当输出低电平时,下管Q2导通,电流流入芯片内部(挽)。这种"一推一挽"的工作方式赋予了推挽输出强大的驱动能力。
推挽输出的特点:
- 高低电平切换速度快
- 驱动能力强(通常可达20mA以上)
- 输出阻抗低,抗干扰能力强
- 无需外接上拉电阻
2.2 推挽模式的应用场景
推挽输出最适合以下场景:
- 高速信号传输:如SPI、I2C(某些情况下)等总线接口
- 直接驱动负载:LED、小型继电器等
- 需要强驱动能力的场合:如驱动多个门电路
c复制// STM32配置推挽输出的示例代码
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出模式
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
2.3 推挽模式的局限性
虽然推挽输出功能强大,但在某些场景下并不适用:
- 不同电压等级器件互联:当两个芯片工作电压不同时,推挽输出可能导致过压损坏
- 总线竞争场景:多个输出直接相连可能导致短路
- 需要电平转换的场合
3. 开漏输出模式深入解析
3.1 开漏工作原理
开漏输出模式下,上管Q1始终关闭,只有下管Q2工作。当Q2导通时,输出被拉低;当Q2截止时,输出呈现高阻态(相当于断开)。因此,开漏输出必须外接上拉电阻才能输出高电平。
开漏输出的关键特性:
- 只能主动拉低电平,不能主动输出高电平
- 高电平靠外部上拉电阻实现
- 支持"线与"逻辑(多个输出可直接相连)
3.2 开漏模式的两大核心优势
3.2.1 电平转换功能
当不同电压等级的器件需要通信时,开漏输出配合适当的上拉电阻可以安全实现电平转换。例如5V器件与3.3V器件的通信:
- 5V端配置为开漏输出
- 上拉电阻连接到3.3V电源
- 这样无论5V端输出高或低,3.3V端都不会承受超过其工作电压的信号
3.2.2 多设备总线共享
在I2C等总线协议中,多个设备需要共享同一条信号线。开漏输出允许:
- 任一设备都能主动拉低总线电平
- 当所有设备都释放总线时,上拉电阻将总线恢复为高电平
- 避免了多个推挽输出同时驱动导致的短路风险
c复制// I2C引脚配置示例(开漏输出)
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7; // SCL和SDA
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // 复用开漏输出
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
3.3 开漏模式的设计考量
使用开漏输出时需要考虑以下因素:
- 上拉电阻的阻值选择(后文详述)
- 信号上升时间(与RC时间常数有关)
- 总线电容负载
- 功耗考虑(特别是电池供电设备)
4. 上拉电阻的工程实践
4.1 上拉电阻的核心作用
上拉电阻在开漏输出电路中承担两个关键角色:
- 确定高电平时的电压值
- 提供电流路径使输出能够达到高电平
没有上拉电阻时,开漏输出只能输出低电平或高阻态,无法提供稳定的高电平信号。
4.2 上拉电阻的参数权衡
选择上拉电阻值时需要平衡两个相互矛盾的因素:
| 考虑因素 | 小电阻优势 | 大电阻优势 |
|---|---|---|
| 驱动能力 | 上升时间快,驱动能力强 | 上升时间慢,驱动能力弱 |
| 功耗 | 静态电流大,功耗高 | 静态电流小,功耗低 |
| 抗干扰 | 抗干扰能力强 | 抗干扰能力较弱 |
4.3 上拉电阻的取值计算
实际工程中,上拉电阻的取值通常在1kΩ到100kΩ之间。具体计算需要考虑:
-
最大允许上升时间:
code复制t_rise ≈ 2.2 × R_pullup × C_bus其中C_bus是总线总电容(包括走线电容和器件输入电容)
-
最大允许电流:
code复制I_max = Vcc / R_pullup需要确保不超过GPIO的电流驱动能力
-
功耗限制:
code复制P = Vcc² / R_pullup对电池供电设备尤为重要
经验法则:对于标准I2C总线(100kHz),常用4.7kΩ上拉电阻;对于快速模式(400kHz),常用2.2kΩ。
4.4 上拉电阻的布局要点
- 上拉电阻应尽量靠近主控器件放置
- 对于长走线,可考虑减小电阻值补偿线缆电容
- 高速信号可能需要使用更低阻值(如500Ω)
- 多设备总线中,通常只需要一组上拉电阻(放置在总线中部或主控端)
5. 下拉电阻的应用解析
5.1 下拉电阻的基本功能
与上拉电阻相对,下拉电阻用于确保输入引脚在无驱动时保持稳定的低电平。主要应用场景包括:
- 防止未使用的输入引脚浮空
- 确保复位电路稳定
- 按钮/开关输入电路
- 配置引脚的状态确定
5.2 下拉电阻的取值原则
下拉电阻的取值通常比上拉电阻大,原因在于:
- 大多数器件的输入阻抗较高,不需要强下拉
- 节省功耗考虑
- 不影响正常的高电平输入
典型取值范围:10kΩ到100kΩ
5.3 输入引脚浮空的危害
当输入引脚浮空(无上拉或下拉)时,可能出现:
- 随机电平波动导致逻辑错误
- 增加功耗(CMOS器件输入浮空时可能同时导通上下管)
- 抗干扰能力下降
- 系统启动状态不确定
c复制// 配置下拉输入的示例代码
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLDOWN; // 启用下拉电阻
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
5.4 下拉电阻的特殊应用
在某些特殊电路中,下拉电阻还用于:
- 分压电路
- 电流检测
- 信号终端匹配
- 静电放电(ESD)保护
6. 实际设计中的经验技巧
6.1 模式选择的黄金法则
根据多年工程实践,我总结出GPIO模式选择的几条经验:
- 默认首选推挽输出:除非有特殊需求,否则优先使用推挽输出
- 电平转换必用开漏:不同电压器件互联时使用开漏输出
- 总线共享必须开漏:I2C等共享总线必须使用开漏
- 输入必配上/下拉:所有输入引脚必须配置明确的上拉或下拉
6.2 常见设计误区
- 上拉电阻值随意选择:应根据具体应用计算,而非随意使用4.7kΩ
- 忽略走线电容影响:长走线会显著增加总线电容
- 推挽输出直接互联:多个推挽输出直接相连可能引发短路
- 浮空输入引脚:这是嵌入式系统不稳定的常见原因之一
6.3 调试技巧
当遇到GPIO相关问题时,可以按照以下步骤排查:
- 确认GPIO模式配置正确(推挽/开漏)
- 检查上拉/下拉电阻是否合理
- 测量实际输出电压是否符合预期
- 检查负载是否过重(超出GPIO驱动能力)
- 用示波器观察信号波形,检查上升/下降时间
实测技巧:调试时可以用可变电阻临时替代固定电阻,通过调整找到最佳阻值后再换成固定电阻。
6.4 高级应用:GPIO的复用功能
现代MCU的GPIO通常支持多种复用功能,配置时需注意:
- 某些复用功能自动确定输出模式(如I2C自动配置为开漏)
- 复用功能可能限制上拉/下拉电阻的使用
- 高速信号可能需要特定引脚才能保证性能
- 不同bank的GPIO可能有不同的驱动能力
c复制// 复用功能配置示例(USART TX为推挽输出)
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = GPIO_PIN_9; // USART1_TX
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP; // 复用推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
7. 不同MCU平台的实现差异
虽然推挽和开漏的基本概念相同,但不同厂商的MCU在具体实现上存在一些差异:
7.1 STM32系列
- 输出模式配置灵活
- 可独立配置上拉/下拉电阻
- 支持多种复用功能
- 不同系列驱动能力略有差异
7.2 ESP32系列
- 多数GPIO可自由配置
- 部分引脚有特殊限制(如启动配置引脚)
- 支持更丰富的IO矩阵功能
- 驱动能力较强(可达40mA)
7.3 51单片机
- 传统51单片机P0口为开漏输出
- 其他端口内部有弱上拉
- 驱动能力相对较弱
- 配置选项较少
7.4 AVR系列
- 输出模式配置简单
- 内置上拉电阻可软件控制
- 驱动能力适中(20mA左右)
- 部分引脚有特殊功能限制
在实际项目中,务必查阅具体芯片的数据手册,了解其GPIO模块的特殊性和限制条件。我曾经在一个项目中因为没注意某款MCU特定引脚的驱动能力限制,导致系统不稳定,后来通过仔细阅读数据手册才找到问题根源。