
1. 开发环境配置与工具链协作
在Windows平台下使用PCL+VTK+Qt进行点云可视化开发时,环境配置是最容易踩坑的环节。我的开发环境采用VS2019作为主IDE,Qt Creator 4.11.0作为UI设计工具,这种混合开发模式需要注意以下几个关键点:
工具链版本匹配:
- PCL 1.14.0需要对应VTK 9.3.0版本
- Qt 5.15.2需使用MSVC2017或2019编译器
- 所有组件必须统一使用x64架构
重要提示:安装PCL时务必勾选"Add PCL to the system PATH"选项,否则后续编译会提示找不到pcl_common_debug.dll等库文件
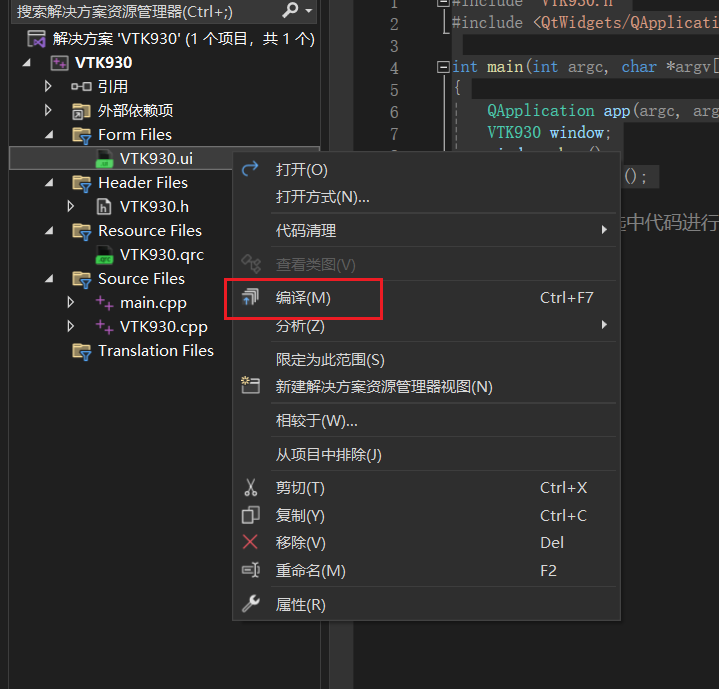
UI文件同步机制:
- 在Qt Creator中修改.ui文件后保存
- 必须在VS中右键项目 → 编译 → 仅重新生成UI文件
- 等待输出窗口显示"Generating ui_xxx.h"完成提示
- 若跳过此步骤,会导致UI界面与代码逻辑不同步
2. 关键编译参数设置
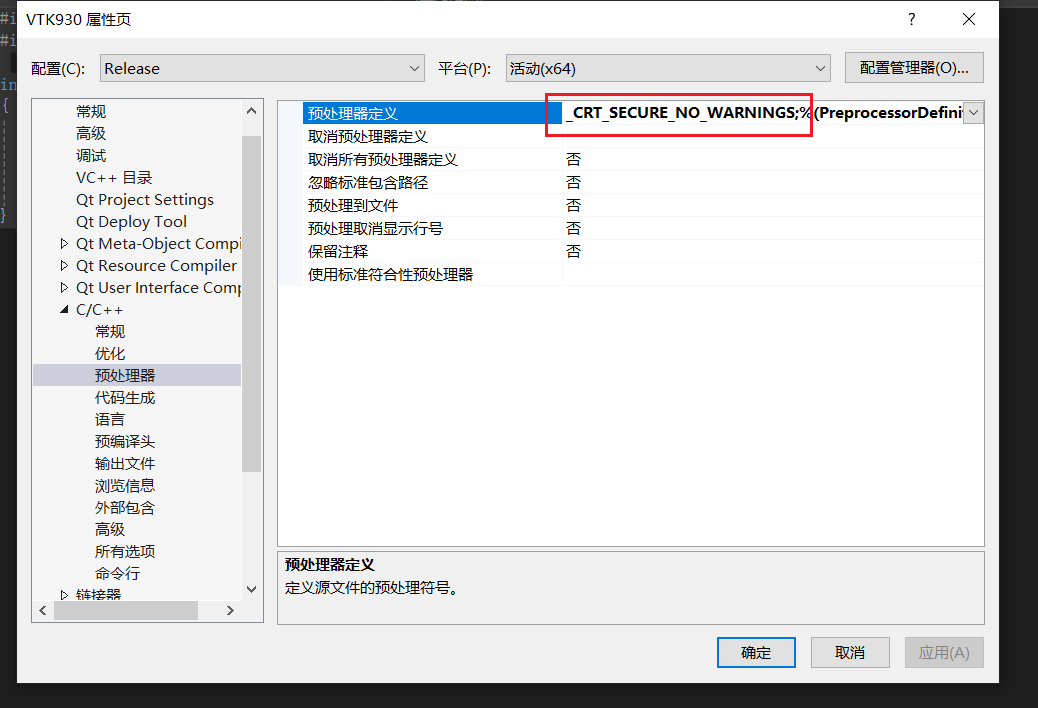
2.1 预处理器定义配置
在项目属性 → C/C++ → 预处理器 → 预处理器定义中,必须添加:
code复制_CRT_SECURE_NO_WARNINGS
_USE_MATH_DEFINES
NOMINMAX
2.2 库目录与包含目录
- 包含目录需添加:
code复制$(PCL_ROOT)\include\pcl-1.14 $(VTK_DIR)\include\vtk-9.3 $(QTDIR)\include - 库目录需包含:
code复制$(PCL_ROOT)\lib $(VTK_DIR)\lib $(QTDIR)\lib
3. 运行时异常分析与解决
3.1 典型错误现象
程序编译通过但运行时出现崩溃:
code复制Qt5Core.dll) (VTK930.exe 中)处有未经处理的异常: 请求了严重的程序退出。
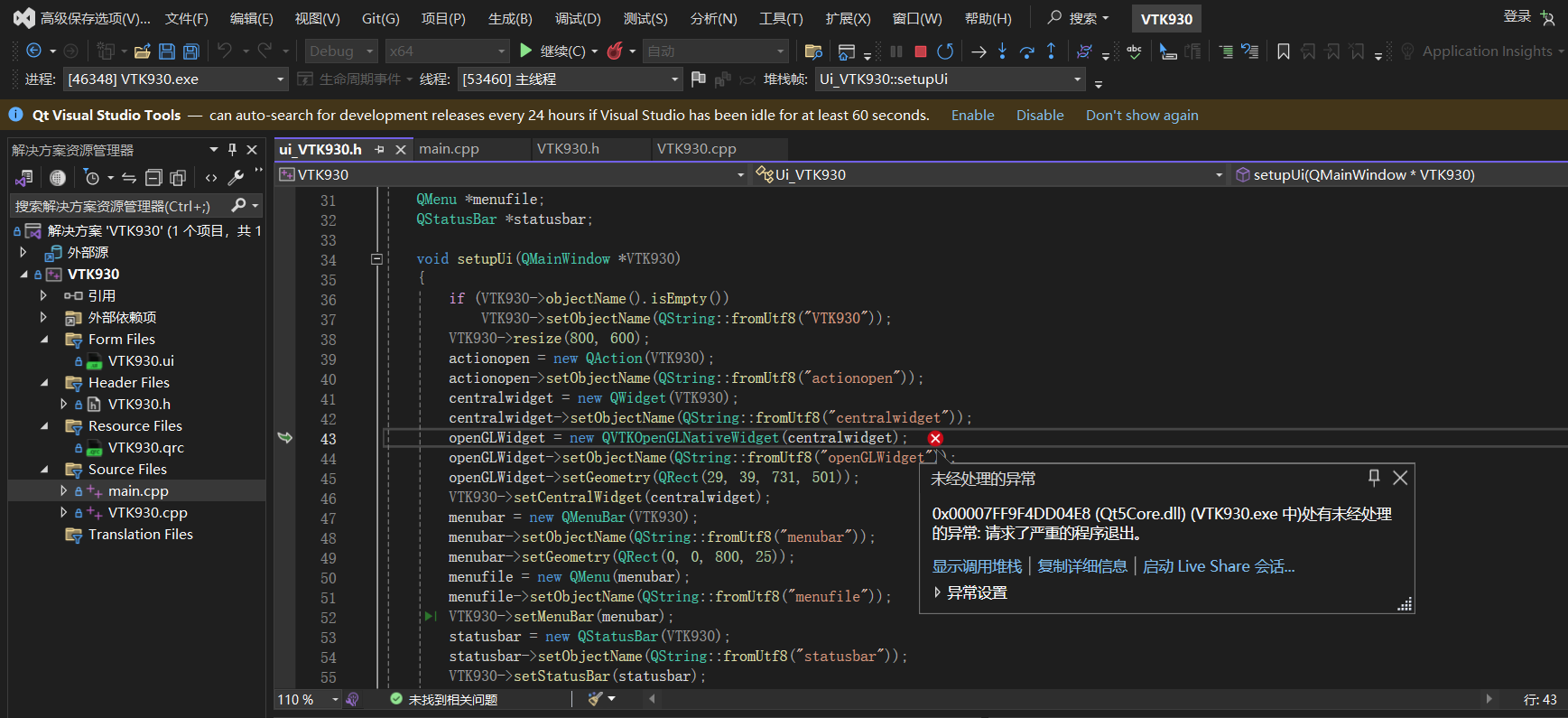
3.2 问题根源
这种错误通常由以下原因导致:
- Debug/Release版本混用(最常见)
- Qt与VTK的运行时库版本不匹配
- 内存越界访问
- 多线程环境下GUI操作未在主线程执行
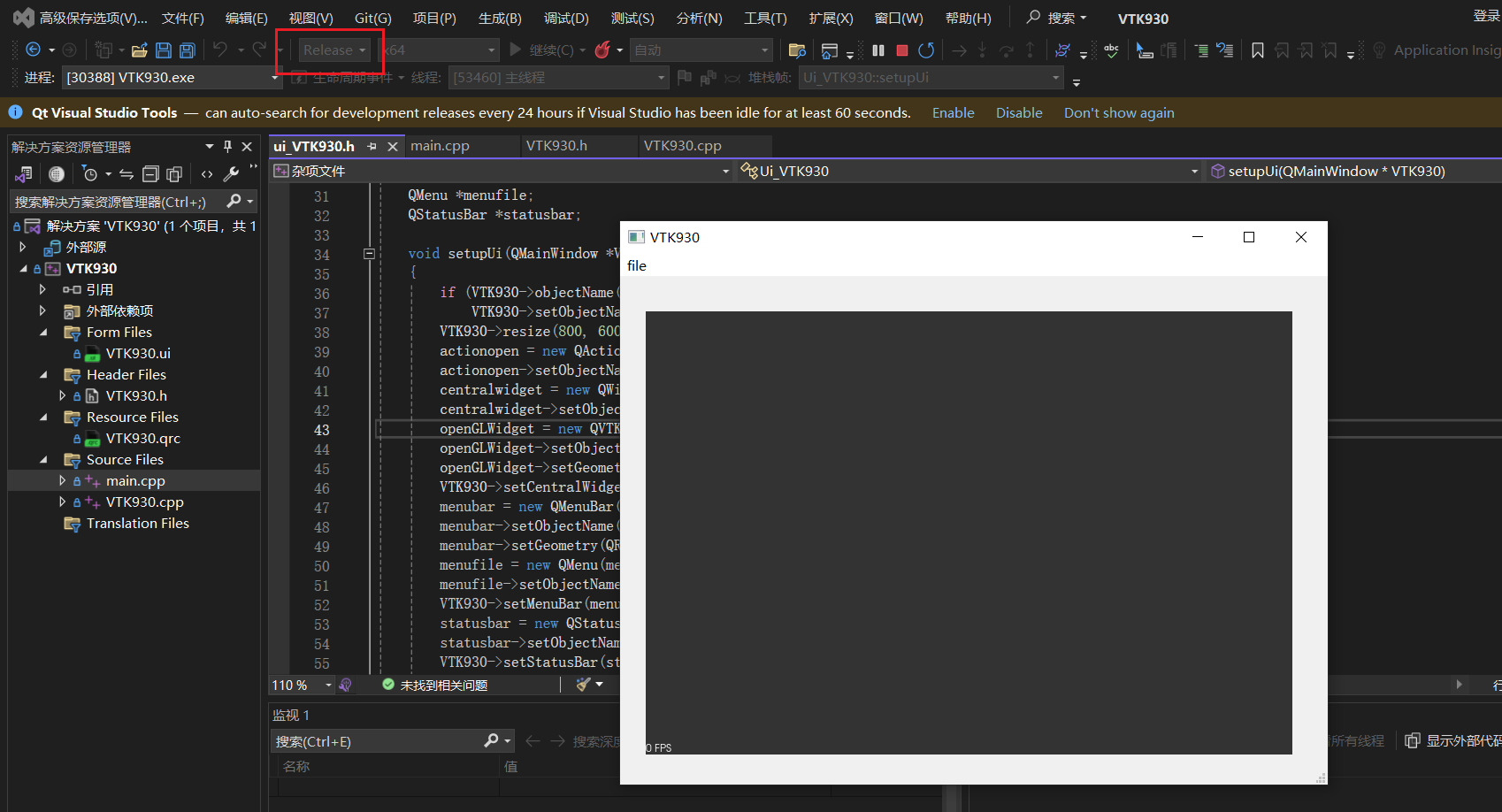
3.3 解决方案
步骤验证法:
-
清理所有中间文件(删除build文件夹)
-
检查项目属性 → 配置管理器,确保活动解决方案平台为x64
-
统一使用Release模式:
- 在Release配置下重新配置包含目录和库目录
- 设置预处理器定义
- 链接器 → 输入 → 附加依赖项中只包含Release版库(如pcl_common_release.lib)
-
环境变量检查:
bat复制echo %PATH%确保包含:
code复制C:\Qt\5.15.2\msvc2019_64\bin C:\Program Files\PCL 1.14.0\bin
4. 点云加载功能实现
4.1 PCL与Qt集成方案
在Qt项目中集成PCL点云视图需要特殊处理:
cpp复制// 在main.cpp中初始化VTK渲染窗口
#include <vtkAutoInit.h>
VTK_MODULE_INIT(vtkRenderingOpenGL2)
VTK_MODITUE_INIT(vtkInteractionStyle)
// 在Qt窗口嵌入PCL可视化
pcl::visualization::PCLVisualizer::Ptr viewer(
new pcl::visualization::PCLVisualizer("Point Cloud Viewer", false));
QVTKOpenGLNativeWidget *widget = new QVTKOpenGLNativeWidget();
widget->SetRenderWindow(viewer->getRenderWindow());
4.2 点云加载核心代码
cpp复制void loadPointCloud(const std::string& file_path) {
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
if (pcl::io::loadPCDFile<pcl::PointXYZ>(file_path, *cloud) == -1) {
QMessageBox::critical(this, "Error", "Failed to load PCD file");
return;
}
viewer->removeAllPointClouds();
viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");
viewer->resetCamera();
widget->update();
}
5. 常见问题排查指南
5.1 问题速查表
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 无法打开PCD文件 | 文件路径含中文/空格 | 使用ASCII编码路径或移动文件位置 |
| 点云显示空白 | 相机视角不对 | 调用viewer->resetCamera() |
| 界面卡死 | GUI操作在非主线程 | 使用QMetaObject::invokeMethod跨线程调用 |
| 内存泄漏 | VTK智能指针未正确释放 | 使用vtkNew<>代替new操作 |
5.2 调试技巧
-
依赖检查:
bash复制
dumpbin /DEPENDENTS your_app.exe检查输出的DLL列表是否包含正确的Qt/PCL/VTK版本
-
运行时日志:
在main函数开头添加:cpp复制qputenv("QT_DEBUG_PLUGINS", "1");可在输出窗口查看插件加载详情
-
内存诊断:
在VS中启用内存诊断:cpp复制#define _CRTDBG_MAP_ALLOC #include <crtdbg.h>程序退出时调用:
cpp复制
_CrtDumpMemoryLeaks();
6. 性能优化建议
-
点云渲染优化:
cpp复制viewer->setPointCloudRenderingProperties( pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "cloud"); -
多线程加载方案:
cpp复制QFutureWatcher<void> watcher; QFuture<void> future = QtConcurrent::run([=](){ // 点云加载耗时操作 }); watcher.setFuture(future); -
视窗刷新控制:
cpp复制viewer->setBackgroundColor(0.2, 0.2, 0.2); viewer->setCameraPosition(0,0,-5, 0,0,1, 0,-1,0); widget->setUpdateBehavior(QVTKOpenGLNativeWidget::PartialUpdate);
经过这些配置和优化后,我们的点云可视化程序可以达到30fps以上的渲染性能,能够流畅处理百万级点云数据的实时显示与交互。