
1. FreeRTOS任务调度算法深度解析
作为一名在嵌入式领域摸爬滚打多年的工程师,我深知实时操作系统(RTOS)的任务调度机制对系统性能的决定性影响。今天我们就来深入探讨FreeRTOS的调度算法,通过实际工程案例演示如何配置三大核心参数:任务抢占、时间片轮转和空闲任务让步。这些配置看似简单,却直接影响着系统的实时性、资源利用率和任务公平性。
2. 实验环境搭建与基础配置
2.1 工程准备与硬件连接
在开始实验前,我们需要准备一个标准的STM32开发环境。我使用的是STM32F407 Discovery开发板,配合逻辑分析仪观测任务执行时序。工程基于STM32CubeIDE创建,集成了FreeRTOS v10.4.3内核。
提示:逻辑分析仪的采样率建议设置为系统时钟的4倍以上,这样才能准确捕捉任务切换的瞬间。
工程中创建了三个测试任务:
- Task1:优先级1,执行周期任务
- Task2:优先级1,执行周期任务
- Task3:优先级2(最高),执行带延时的任务
c复制void Task1(void *argument) {
for(;;) {
HAL_GPIO_TogglePin(GPIOA, GPIO_PIN_0); // 用PA0引脚输出方波
osDelay(100); // 模拟任务处理
}
}
2.2 关键宏定义解析
FreeRTOS的调度行为主要由以下三个宏控制(位于FreeRTOSConfig.h):
c复制#define configUSE_PREEMPTION 1 // 抢占式调度开关
#define configUSE_TIME_SLICING 1 // 时间片轮转开关
#define configIDLE_SHOULD_YIELD 1 // 空闲任务让步开关
这三个参数的不同组合会产生完全不同的调度行为。接下来我们将通过修改这些参数,观察系统行为的变化。
3. 抢占式调度实验分析
3.1 抢占使能(configUSE_PREEMPTION=1)
当启用抢占式调度时,高优先级任务可以立即抢占低优先级任务的执行权。这是我们最常用的配置模式。
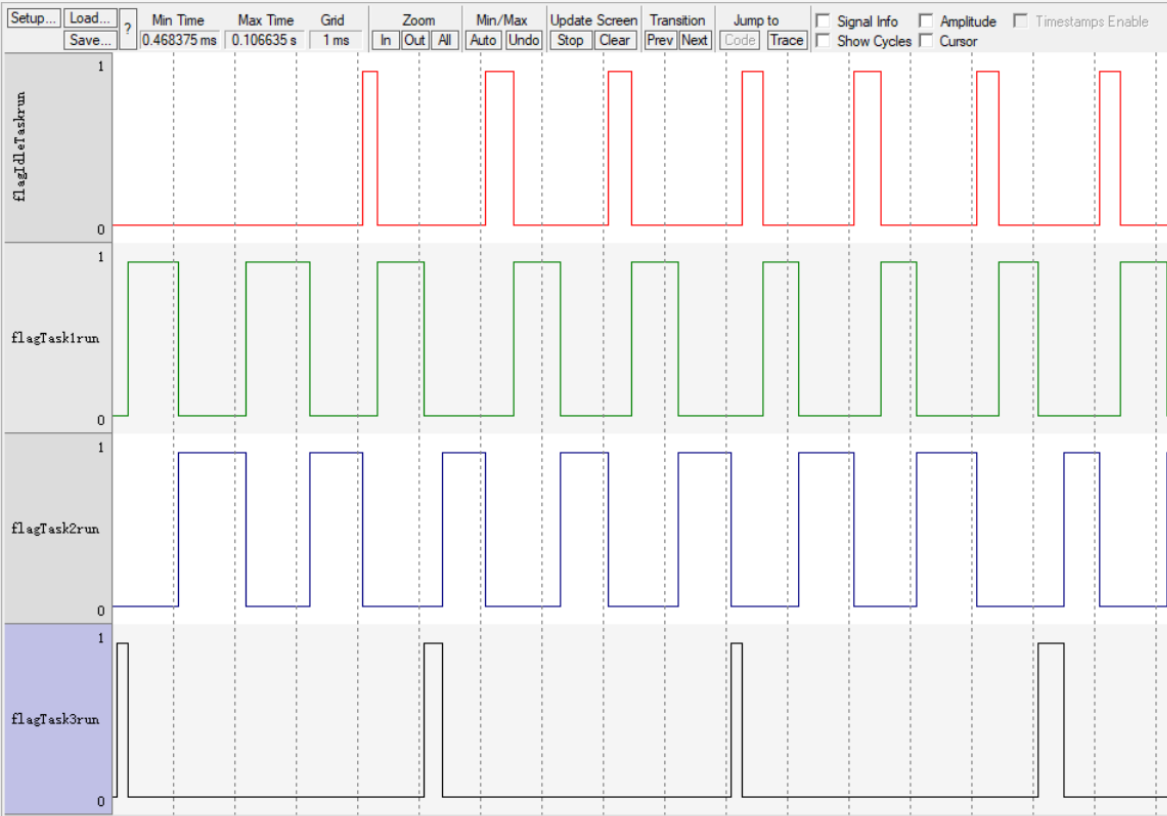
实验现象:
- 系统启动后,最高优先级的Task3首先运行
- Task3调用osDelay()进入阻塞态后,调度器选择Task1运行
- 当Task3阻塞时间结束,立即抢占Task1的执行权
注意:抢占发生时,当前任务的上下文会被完整保存,确保被抢占的任务恢复时能继续执行。
3.2 非抢占式调度(configUSE_PREEMPTION=0)
在非抢占模式下,任务会一直运行直到主动放弃CPU(调用延时或阻塞API)。
实验现象:
- Task3首先运行,进入阻塞态后Task1开始执行
- 即使Task3阻塞时间结束,也不会打断Task1的执行
- Task1必须主动放弃CPU后,Task3才能恢复执行
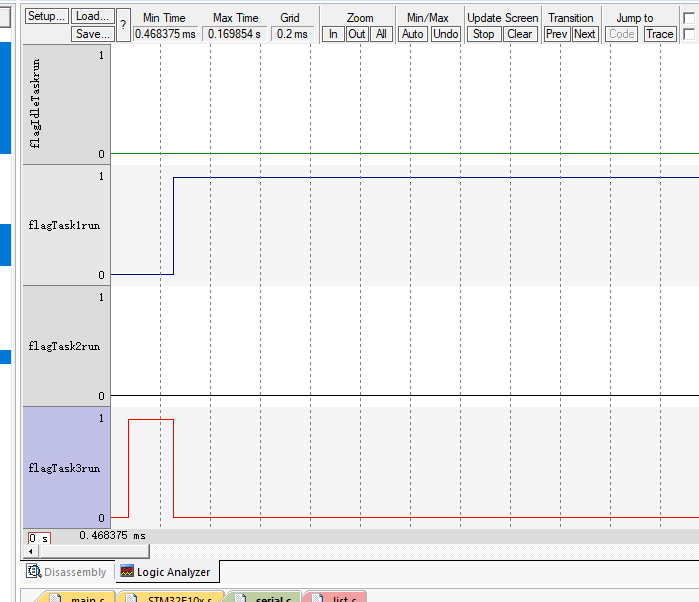
实际应用:非抢占模式适合对实时性要求不高的场景,能减少任务切换开销,但可能导致高优先级任务响应延迟。
4. 时间片轮转调度实验
4.1 时间片轮转使能(configUSE_TIME_SLICING=1)
当多个同优先级任务就绪时,时间片轮转机制会让它们平分CPU时间。
实验配置:
- Task1和Task2优先级相同(1)
- Task3优先级更高(2)
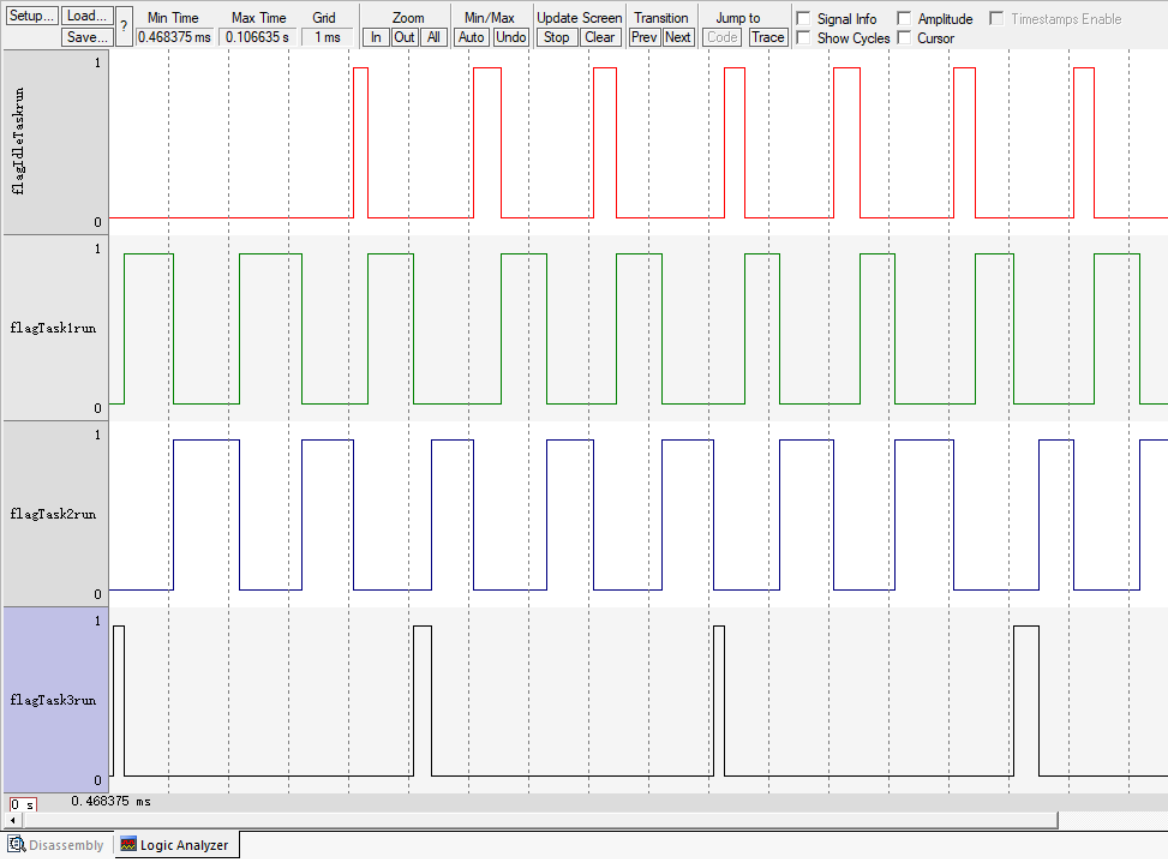
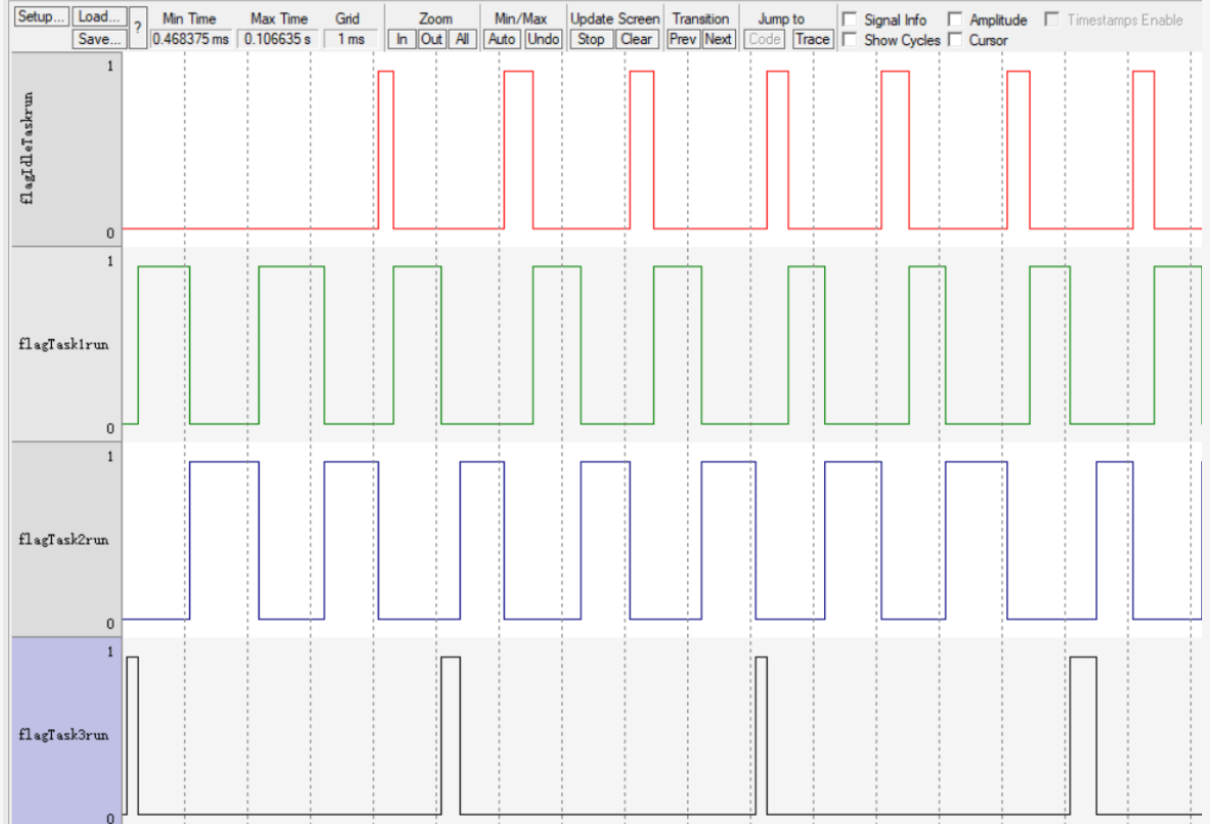
实验现象:
- Task3运行并阻塞后,Task1和Task2开始轮流执行
- 每个任务执行一个时间片(通常为1ms)后切换
- 逻辑分析仪显示两个任务的GPIO输出交替变化
4.2 时间片轮转禁用(configUSE_TIME_SLICING=0)
禁用时间片轮转后,同优先级任务将不会自动切换。
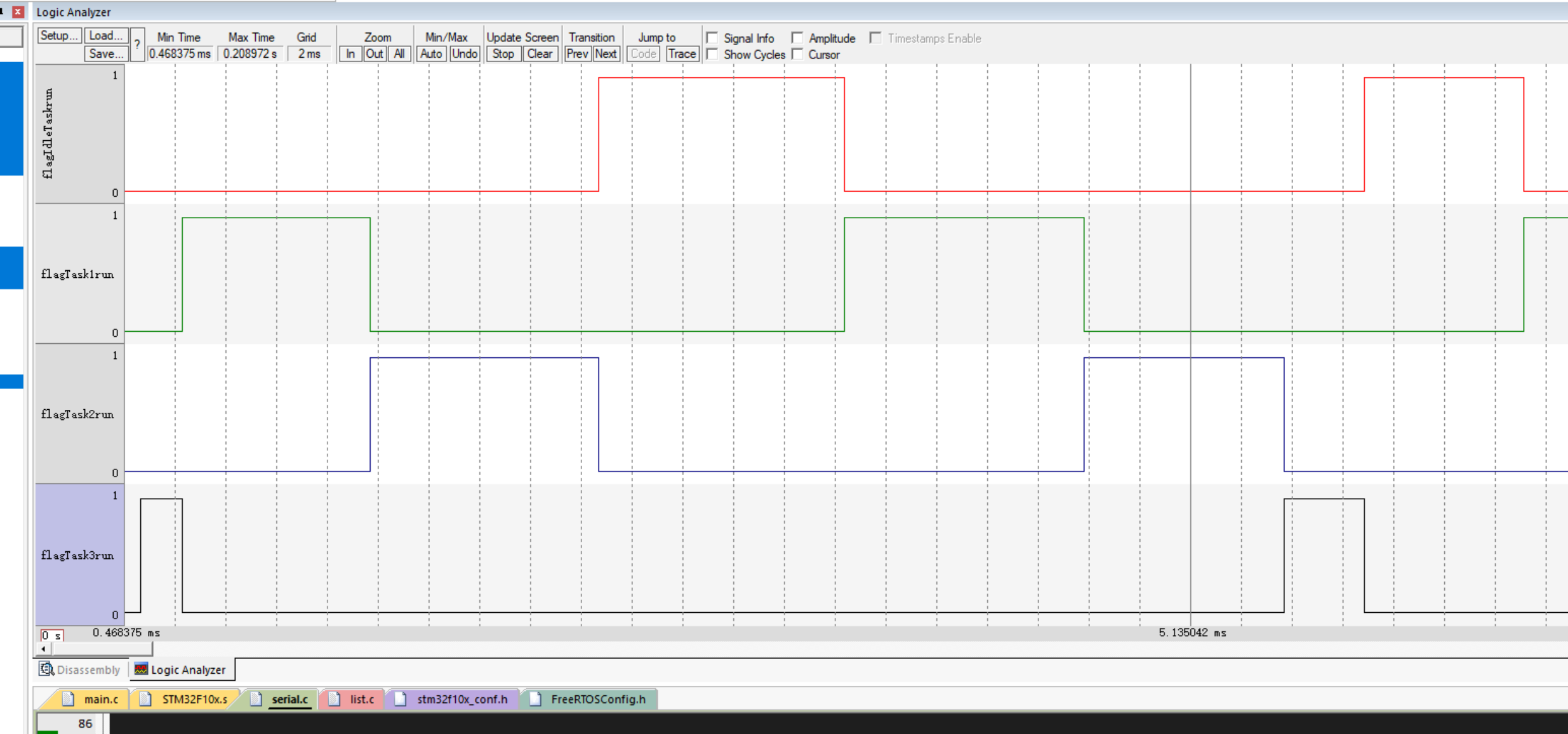
实验现象:
- Task3阻塞后,Task1开始执行
- Task1会一直运行直到主动放弃CPU
- 只有Task1阻塞后,Task2才有机会执行
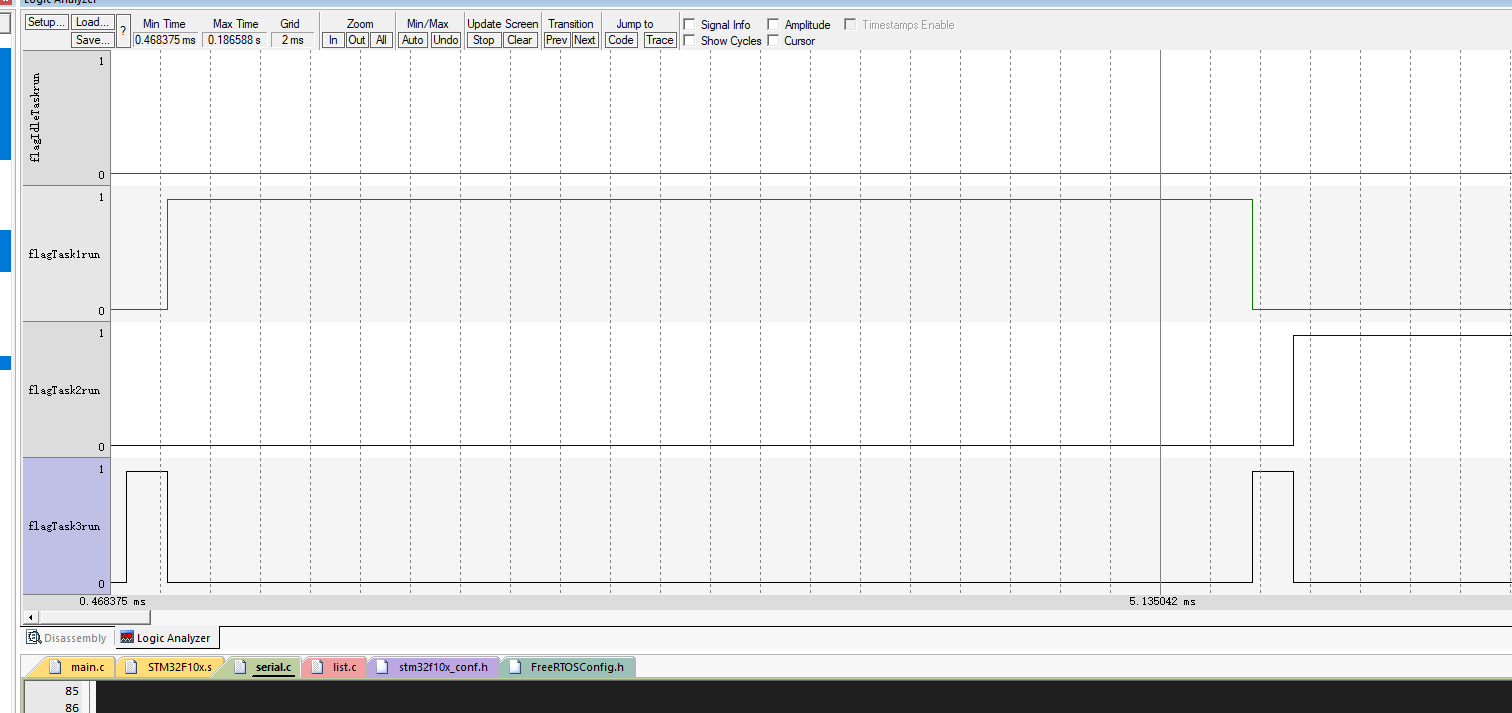
经验分享:在事件驱动的系统中,通常可以禁用时间片轮转,因为任务会在事件触发后主动让出CPU。而在计算密集型系统中,启用时间片轮转可以保证任务公平性。
5. 空闲任务让步实验
5.1 空闲任务让步使能(configIDLE_SHOULD_YIELD=1)
FreeRTOS的空闲任务优先级为0(最低),当启用让步功能时,如果有同优先级的用户任务就绪,空闲任务会主动让出CPU时间。
实验现象:
- 当所有用户任务都处于阻塞态时,空闲任务运行
- 一旦有用户任务解除阻塞,空闲任务立即让步
- 用户任务执行完毕再次阻塞后,空闲任务恢复执行
5.2 空闲任务不让步(configIDLE_SHOULD_YIELD=0)
禁用让步功能后,空闲任务将与同优先级的用户任务平等竞争CPU时间。
实验现象:
- 空闲任务和用户任务按照时间片轮转的方式执行
- 即使用户任务就绪,也必须等待当前时间片结束
- 空闲任务会占用更多的CPU时间
避坑指南:在低功耗应用中,通常需要启用空闲任务让步,这样可以在用户任务就绪时尽快处理,然后快速回到空闲状态进入低功耗模式。
6. 调度器配置实战建议
根据多年项目经验,我总结了以下配置建议:
-
实时性要求高的系统:
- 启用抢占(configUSE_PREEMPTION=1)
- 禁用时间片轮转(configUSE_TIME_SLICING=0)
- 启用空闲让步(configIDLE_SHOULD_YIELD=1)
-
公平性要求高的系统:
- 启用抢占(configUSE_PREEMPTION=1)
- 启用时间片轮转(configUSE_TIME_SLICING=1)
- 根据需求选择空闲让步
-
低功耗系统:
- 启用抢占(configUSE_PREEMPTION=1)
- 启用空闲让步(configIDLE_SHOULD_YIELD=1)
- 在空闲任务钩子函数中实现低功耗处理
常见问题排查:
-
高优先级任务不执行:
- 检查是否误配置为非抢占模式
- 确认高优先级任务没有永久阻塞
-
同优先级任务执行不均:
- 确认时间片轮转是否启用
- 检查任务是否调用了阻塞API
-
系统响应慢:
- 尝试提高关键任务优先级
- 减少不必要的任务切换
在实际项目中,我通常会先配置为全功能模式(三个参数都设为1),然后根据性能测试结果逐步优化。记住,没有最好的配置,只有最适合当前应用场景的配置。