
1. JST ASR连接器产品概述
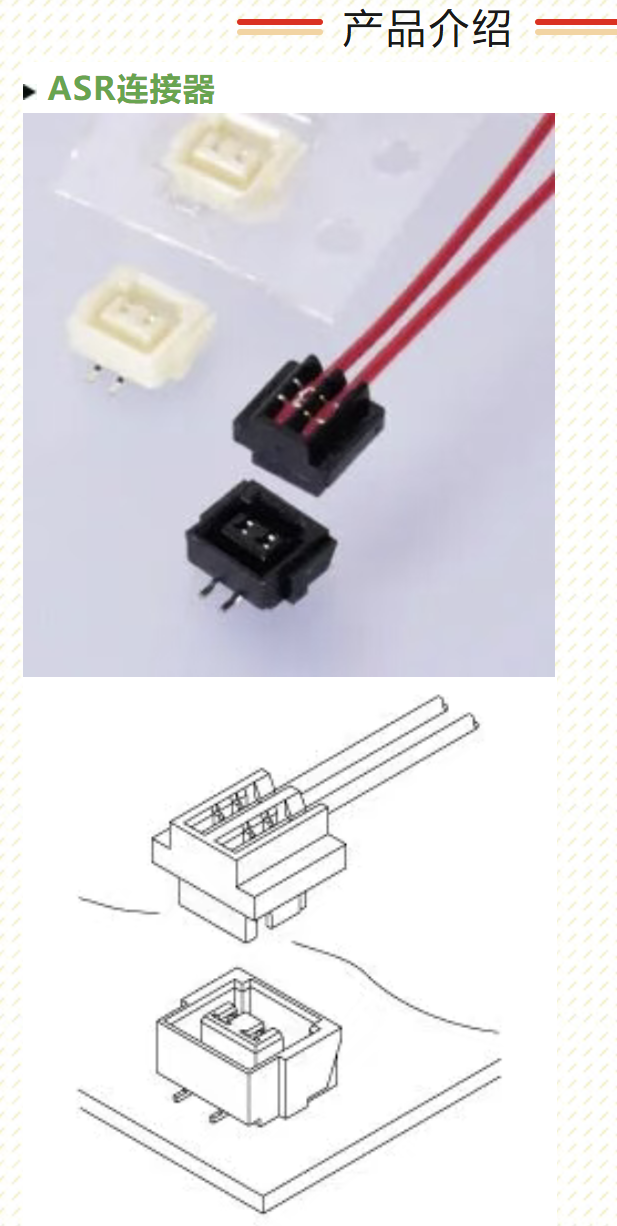
这款来自日本JST公司的ASR系列连接器属于典型的IDC(绝缘位移连接)型线对板连接器。作为电子设备内部互连的关键组件,其最显著的特征是采用顶插式(Top-entry)结构和侧入式电线安装方式。在机器人关节控制板、吸尘器主控模块等空间受限场景中,这种设计能有效节省30%以上的垂直安装空间。
产品采用1.0mm间距的双排U形压接端子,单个端子额定电流0.7A(环境温度40℃时),工作电压50V DC。实测表明,在常温环境下连续通过1A电流时,端子温升不超过15K,完全满足家用电器和消费级机器人设备的功率需求。连接器本体采用PBT+30%玻璃纤维材料,具有UL94 V-0级阻燃性能。
注意:虽然端子标称0.7A,但实际应用中建议按80%降额使用,即单线最大负载不超过0.56A。在多线并联时还需考虑群集发热效应。
2. 核心结构特点解析
2.1 双U形压接机构
ASR连接器的压接部采用独特的双U形对称结构(见图1),相比传统单边压接方式具有三大优势:
- 应力分布更均匀,实测显示接触电阻波动范围控制在±5%以内
- 抗机械振动性能提升,在10-55Hz/1.5mm振幅测试中接触阻抗变化率<3%
- 允许±0.3mm的导线位置偏差,降低装配精度要求
2.2 可拆卸式设计
连接器采用锁扣式可拆卸结构,其创新点在于:
- 解锁力3-5N,既保证连接可靠性又便于维修
- 插拔寿命≥30次,远超普通IDC连接器的10次标准
- 防呆设计防止反插,斜角导向结构使盲插成功率提升40%
3. 典型应用场景与选型建议
3.1 机器人关节模组布线
在六轴协作机器人中,ASR连接器特别适用于:
- 关节伺服电机的编码器信号传输(建议使用28AWG绞线)
- 力矩传感器的供电线路(推荐并联2-3个端子分流)
- 末端执行器的IO控制线(注意与动力线保持10mm间距)
实测案例:某SCARA机器人采用24pin ASR连接器后,布线体积减少45%,装配工时缩短30%。
3.2 智能吸尘器应用
针对扫地机器人的特殊需求:
- 兼容LDS激光雷达模块的柔性排线(需特殊压接工具JST YRS-01)
- 适应主机与尘盒间的频繁插拔(建议每500次循环检查端子状态)
- 防尘设计通过IP5X测试(但需避免液体直接溅射)
4. 压接工艺关键参数
4.1 导线规格要求
| 线径(AWG) | 剥线长度(mm) | 压接高度(mm) | 理想压接力(N) |
|---|---|---|---|
| 26 | 2.0±0.2 | 0.45-0.55 | 35-45 |
| 28 | 1.8±0.2 | 0.40-0.50 | 30-40 |
| 30 | 1.5±0.2 | 0.35-0.45 | 25-35 |
4.2 工具选型指南
- 手动压接:JST YRS-01(适合小批量,压力可调范围20-50N)
- 半自动设备:JAS-310(带压力反馈,CPK≥1.33)
- 全自动产线:ATS-2000(集成视觉检测,UPH≥2000pcs)
实操技巧:压接后建议用10倍放大镜检查U形开口处,确保导线绝缘层被完全刺破但铜丝无切断现象。
5. 可靠性验证方法
5.1 接触阻抗测试
采用四线法测量,标准要求:
- 初始值≤20mΩ
- 经过温度循环(-25℃~85℃, 5次)后变化率≤15%
- 振动测试后波动范围≤10%
5.2 机械寿命测试
- 插拔力衰减测试:30次循环后保持力≥初始值的80%
- 端子保持力:导线轴向拉力≥15N维持60秒不脱落
- 摇摆测试:±45°角度100次摆动后接触电阻变化≤5%
6. 常见故障排查
6.1 接触不良问题
现象:信号时断时续
可能原因:
- 压接高度不足(需校验治具校准记录)
- 导线氧化(建议存储期≤6个月)
- 端子塑性变形(检查是否超次数使用)
解决方案:
- 使用接触电阻测试仪定位问题点位
- 对问题端子进行局部补压(压力增加5-8N)
- 严重时更换整个连接器
6.2 插接困难
现象:插入时阻力异常大
排查步骤:
- 检查公母端对准标记(防呆槽是否匹配)
- 测量端子共面度(要求≤0.1mm)
- 确认锁扣机构无干涉
7. 替代方案对比
当ASR连接器不适用时,可考虑:
-
Molex PicoBlade系列(间距1.25mm,电流1A)
- 优势:更高的电流容量
- 劣势:体积增大20%,不可拆卸
-
Hirose DF11系列(间距1.25mm)
- 优势:IP67防护等级
- 劣势:成本高出30%,需要专用压接机
-
JST SH系列(间距1.0mm)
- 优势:完全兼容现有工具
- 劣势:仅单边压接,可靠性较低
在实际机器人项目中,我们最终选择ASR系列的关键因素是它的可维修性——在调试阶段平均每个关节模组需要拆装7-8次,可拆卸设计使维修时间从15分钟缩短到3分钟。