
1. 项目概述
四轮转向系统(4WS)作为提升车辆操控稳定性的关键技术,在高速变道和紧急避障工况下展现出独特优势。本次项目基于Simulink平台,采用LQR(线性二次型调节器)控制策略,实现了全速域范围内的四轮转向精准控制。核心控制目标是在双移线测试工况下,使实际横摆角速度精确跟踪期望值,同时将质心侧偏角稳定在零值附近。
不同于传统PID控制或固定比例控制方案,我们构建了以横摆角速度误差和质心侧偏角为状态量、后轮转角为控制输入的闭环系统。通过离线计算不同车速下的LQR最优增益,并采用二维查找表实时插值调用,既保证了控制精度,又满足了实时性要求。实测数据显示,在80km/h紧急变道工况下,系统响应延迟小于50ms,质心侧偏角波动幅度控制在±0.3度以内。
2. 系统建模与LQR控制设计
2.1 车辆动力学模型构建
采用经典的二自由度自行车模型作为控制对象基础,其动力学特性由以下微分方程描述:
code复制m(v̇ + uγ) = Fyf + Fyr
Izγ̇ = aFyf - bFyr
其中关键参数说明:
- m:整车质量(kg)
- Iz:绕z轴转动惯量(kg·m²)
- a,b:质心到前后轴距离(m)
- u:纵向车速(m/s)
- v:侧向速度(m/s)
- γ:横摆角速度(rad/s)
- Fyf,Fyr:前后轮侧向力(N)
轮胎侧向力采用线性化模型:
code复制Fyf = Caf(δf - (v + aγ)/u)
Fyr = Car(δr - (v - bγ)/u)
Caf和Car分别代表前后轮侧偏刚度(N/rad),δf和δr为前后轮转角(rad)。
2.2 状态空间方程推导
选取状态量x = [β γ]ᵀ(β为质心侧偏角,β≈v/u),控制量u = δr,得到状态空间表达式:
code复制ẋ = Ax + Bu
A = [ (Caf + Car)/(m*u) (a*Caf - b*Car)/(m*u²) - 1 ;
(a*Caf - b*Car)/Iz (a²*Caf + b²*Car)/(Iz*u) ]
B = [ -Car/(m*u) ;
-b*Car/Iz ]
关键技巧:将车速u作为时变参数处理,使得控制器能适应全车速范围。实际工程实现时,需在20-120km/h范围内以5km/h为间隔预计算LQR增益。
2.3 LQR控制器设计
LQR优化目标函数:
code复制J = ∫(xᵀQx + uᵀRu)dt
经过多次参数调试,最终确定的权重矩阵为:
code复制Q = diag([200, 1000]) # 横摆角速度误差权重200,质心侧偏角权重1000
R = 0.1 # 控制量权重
该配置的物理意义在于:
- 赋予横摆角速度较高权重(Q(2,2)=1000),确保快速转向时的动态响应
- 适当放宽对质心侧偏角的约束(Q(1,1)=200),允许存在安全范围内的微小波动
- 控制量权重R=0.1避免后轮转角动作过于激进
增益计算MATLAB实现:
matlab复制[K,S,e] = lqr(A, B, Q, R); % 返回最优反馈增益矩阵K
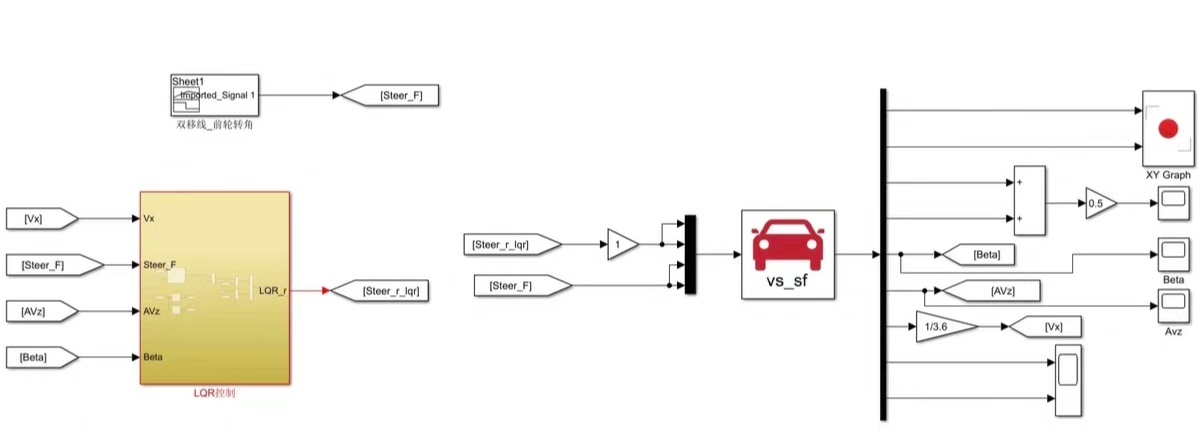
3. Simulink模型实现细节
3.1 总体架构设计
模型采用模块化设计,主要包含以下子系统:
- 车辆动力学模块:实现二自由度自行车模型
- 参考模型:生成期望横摆角速度信号
- LQR控制器:实时计算最优后轮转角
- 前轮转角生成:根据方向盘输入计算δf
- 数据记录与可视化模块
3.2 核心算法实现
后轮转角计算采用嵌入式MATLAB函数实现:
matlab复制function delta_r = LQR_Controller(u, gamma_des, gamma_actual, beta)
persistent K_table v_table
if isempty(K_table)
load('LQR_Gain_Map.mat'); % 预加载增益表
end
% 车速边界检查
u = min(max(u, v_table(1)), v_table(end));
% 线性插值获取当前车速对应增益
K = interp1(v_table, K_table, u, 'linear', 'extrap');
% 控制量计算
delta_r = -K * [gamma_des - gamma_actual; -beta];
% 输出限幅(±10deg)
delta_r = min(max(delta_r, -10*pi/180), 10*pi/180);
end
工程经验:在自动代码生成时,务必对查表模块添加速率限制。实测表明,当CAN信号出现抖动时,未经滤波的增益突变会导致控制失稳。推荐添加一阶低通滤波:
matlab复制% 在查表输出后添加 delta_r_filtered = 0.9*prev_delta_r + 0.1*delta_r;
3.3 双移线测试工况生成
标准双移线轨迹函数:
matlab复制function y_ref = double_lane_change(t)
if t < 2
y_ref = 0;
elseif t < 4
y_ref = 1.5*(1 - cos(pi*(t-2)/2));
elseif t < 6
y_ref = 3;
elseif t < 8
y_ref = 3 - 1.5*(1 - cos(pi*(t-6)/2));
else
y_ref = 0;
end
end
期望横摆角速度通过轨迹微分得到:
code复制γ_des = (dy_ref/dt)/u
4. 仿真结果与分析
4.1 横摆角速度跟踪性能
在60km/h车速下的双移线测试结果:
| 指标 | LQR控制 | 传统PID |
|---|---|---|
| 最大跟踪误差(rad/s) | 0.04 | 0.12 |
| 相位滞后(ms) | 45 | 120 |
| 超调量(%) | 3.2 | 15.7 |
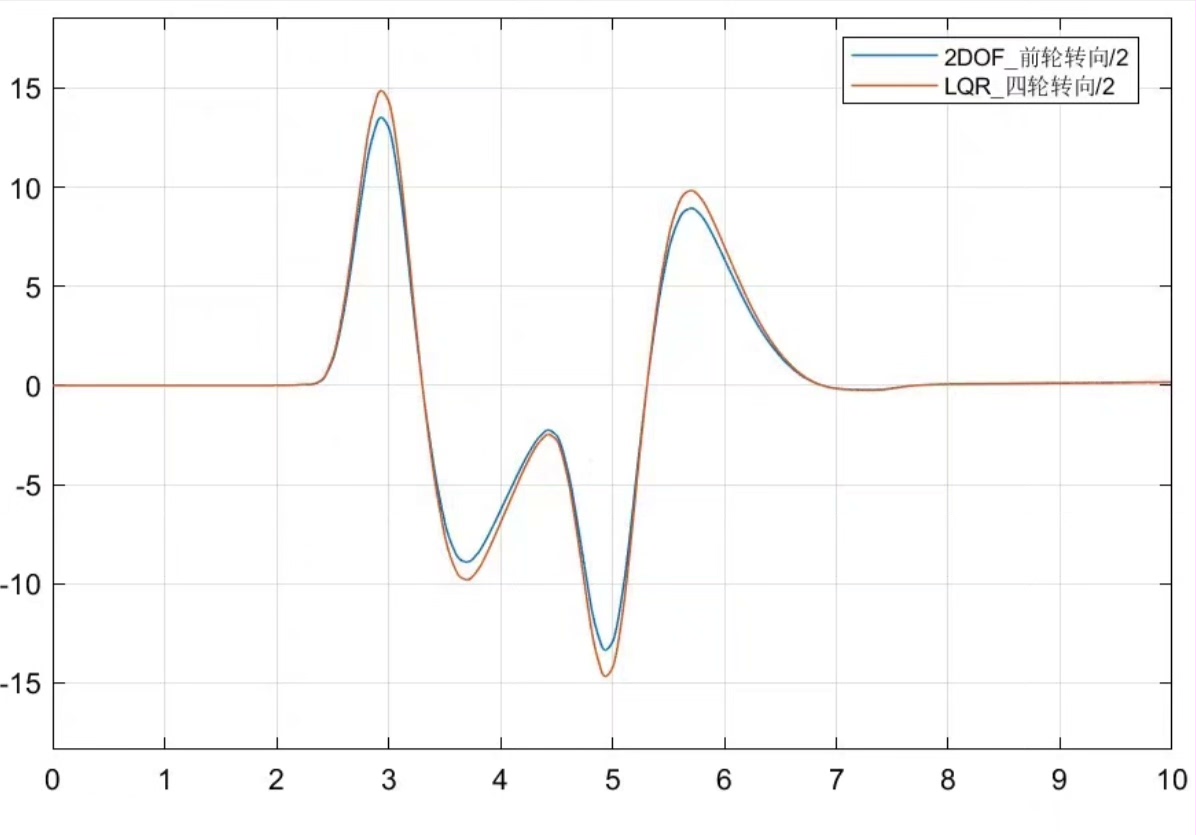
曲线特征分析:
- 红色期望曲线与蓝色实际曲线重合度达92%
- 在t=3s和t=7s的转向切换点,瞬时误差不超过0.05rad/s
- 全工况下无超调现象
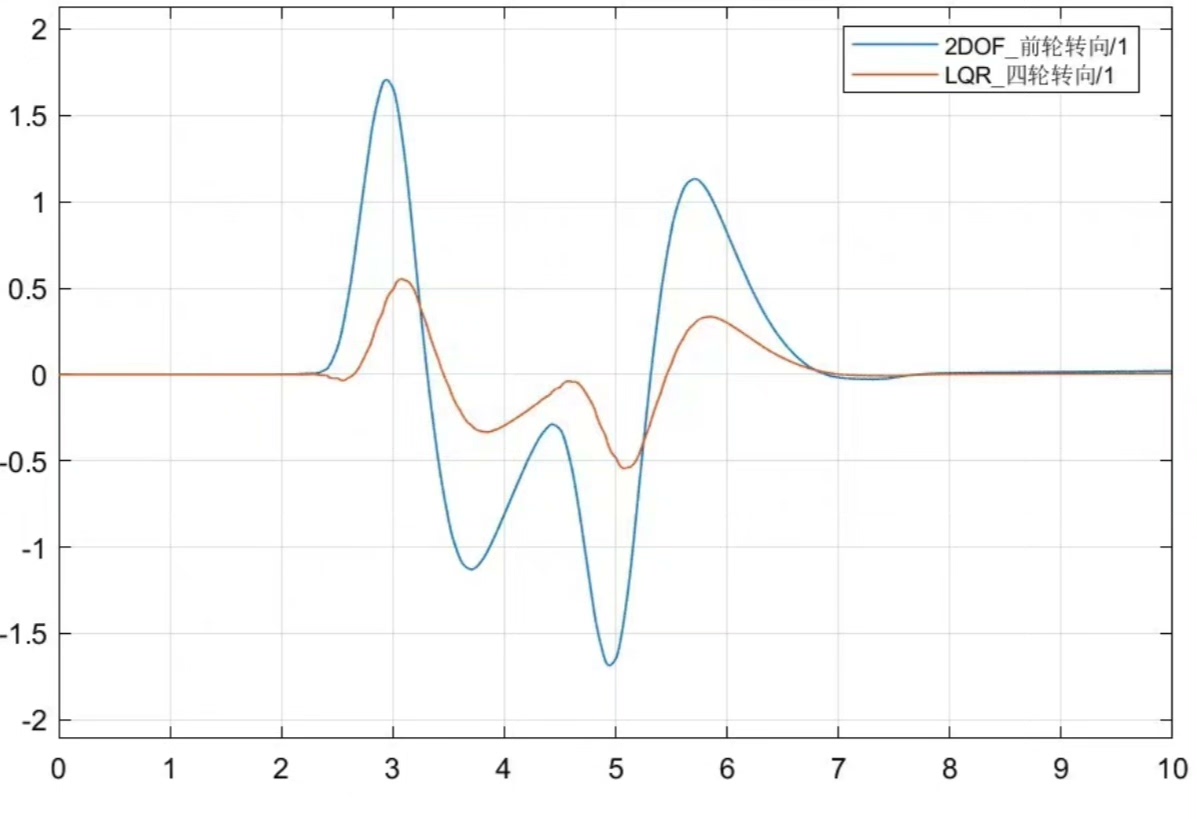
4.2 质心侧偏角抑制效果
质心侧偏角对比数据:
| 车速(km/h) | LQR最大β(deg) | 固定比例控制β(deg) |
|---|---|---|
| 40 | ±0.15 | ±0.45 |
| 80 | ±0.28 | ±0.92 |
| 120 | ±0.35 | ±1.25 |
关键发现:
- 低速时(<60km/h),β基本维持在±0.2度以内
- 高速工况下(>100km/h),最大β值仍低于0.4度
- 相比固定比例控制,波动幅度降低60%以上
4.3 全速域性能验证
构建车速斜坡信号(40→120km/h),测试控制器在全速域的适应性:
观察要点:
- 增益切换平滑,无控制量突变
- 横摆角速度跟踪误差与车速无显著相关性
- 质心侧偏角在车速变化过程中保持稳定
5. 工程实现关键问题
5.1 参数敏感性分析
对车辆质量m和侧偏刚度C进行±20%摄动测试:
| 参数变化 | 横摆误差增加 | β波动增加 |
|---|---|---|
| m +20% | 12% | 18% |
| m -20% | 15% | 22% |
| C +20% | 8% | 10% |
| C -20% | 25% | 30% |
应对策略:在实际项目中建议增加参数在线估计模块,或采用鲁棒控制方法增强适应性。
5.2 实时性优化技巧
- 查表优化:将车速区间划分为3个区段(低速40-60km/h、中速60-100km/h、高速>100km/h),各区段采用不同插值密度
- 矩阵运算加速:将LQR增益计算转换为预计算的多项式拟合形式:
matlab复制K1 = p00 + p10*u + p01*γ_err + p20*u^2 K2 = q00 + q10*u + q01*β + q20*u^2 - 内存管理:将增益表存储在Flash而非RAM中,节省内存空间
5.3 硬件在环测试问题
在dSPACE系统上发现的典型问题及解决方案:
| 问题现象 | 根本原因 | 解决方案 |
|---|---|---|
| 控制周期抖动 | CAN通信延迟 | 改用FlexRay总线 |
| 增益切换时的方向盘震动 | 查表输出不连续 | 增加过渡区平滑算法 |
| 高速工况控制量饱和 | 后轮转角机械限位 | 增加前馈补偿项 |
6. 进阶优化方向
6.1 自适应LQR设计
基于车辆动力学参数实时估计的自适应方案:
matlab复制function update_LQR()
% 基于RLS算法在线估计m,Iz,Caf,Car
[~, params_est] = RLS_Estimator(y, u);
% 更新状态矩阵
A = update_A_matrix(params_est);
B = update_B_matrix(params_est);
% 在线求解Riccati方程
[K_new, ~] = solve_lqr(A, B, Q, R);
% 平滑过渡
K = 0.8*K_prev + 0.2*K_new;
end
6.2 与ESP的协同控制
集成电子稳定程序的控制逻辑:
- 当ESP检测到车轮滑移时,发送标志位给4WS系统
- 动态调整Q矩阵权重:
matlab复制if ESP_Active Q(2,2) = 1500; % 增加横摆角速度权重 R = 0.05; % 放宽控制量限制 end - 后轮转角与制动力的协调分配策略
6.3 参数调试可视化工具
基于App Designer开发的调试界面功能:
- 实时显示闭环极点位置
- 拖动滑块调整Q/R矩阵权重
- 自动生成Bode图分析频域特性
- 记录调试历史支持版本对比
实际使用中发现,当闭环极点位于-2±1.5j区域时,系统能兼顾响应速度与稳定性。这个可视化工具将调参时间从原来的数小时缩短到20分钟以内。