
1. 三相四桥臂APF仿真项目概述
最近在实验室折腾三相四桥臂有源电力滤波器(APF)的Simulink仿真,这个电力电子领域的"谐波杀手"确实名不虚传。使用Matlab 2018a搭建的仿真模型显示,未经控制的电网电流总谐波畸变率(THD)高达24%,中线电流达到10A,活脱脱一个"电力谐波蹦迪现场"。但经过精心设计的双闭环PID控制后,THD直接压到5%以下,中线电流降至2A,直流母线电压稳稳锁定在800V,效果相当惊艳。
这个仿真项目特别适合电力电子方向的研究生和工程师参考,尤其是正在研究有源滤波器、电能质量改善技术的同行。通过本文,你将获得从模型搭建、参数整定到结果分析的全套实战经验,避开我踩过的那些坑。
2. 系统架构与工作原理
2.1 三相四桥臂APF拓扑解析
传统三相三桥臂APF在中线电流补偿方面存在固有缺陷,而四桥臂结构通过增加第四桥臂专门处理零序电流,相当于给三相系统开了个VIP通道。在Simulink模型中,主电路采用典型的电压源型逆变器结构,直流侧电容取值为2200μF,这个值需要根据开关频率和功率等级仔细计算:
code复制C_dc = (3 * P_rated) / (2 * ω * V_dc * ΔV_dc)
其中P_rated为额定功率,ω为角频率,ΔV_dc允许的电压纹波。在我的仿真中,取ΔV_dc为5%的V_dc(即40V)。
2.2 双闭环控制策略设计
控制架构采用经典的双闭环结构:
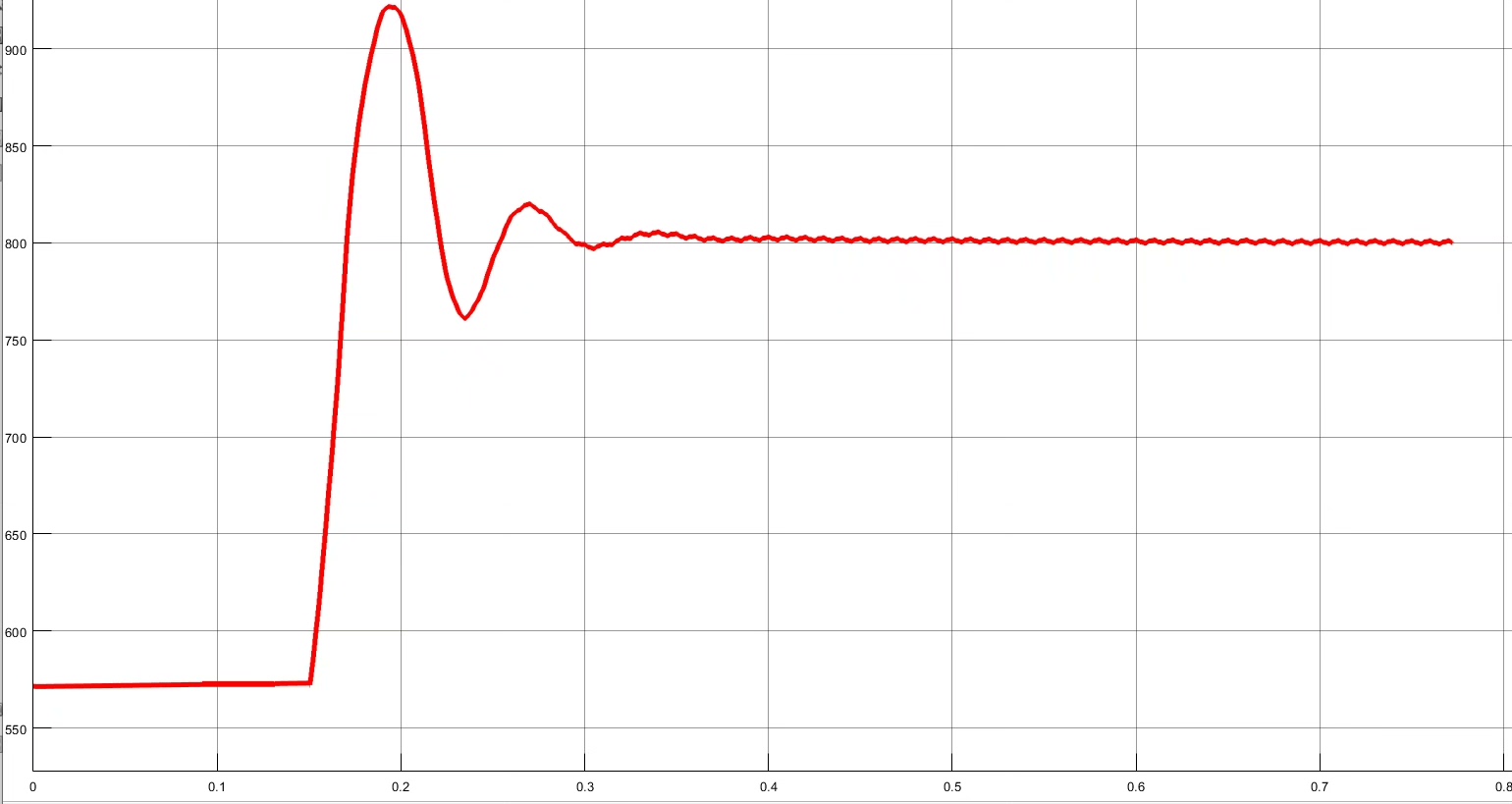
- 外环电压环:负责稳住800V母线电压,采用PI调节器
- 内环电流环:专职追杀谐波,同样采用PI控制
特别需要注意的是,四桥臂系统的控制需要将abc坐标系下的电流转换到dq0旋转坐标系进行处理。Matlab自带的Park变换模块默认不包含零序分量(0轴),需要手动扩展:
matlab复制function [id, iq, i0] = extendedPark(ia, ib, ic, theta)
id = 2/3*(ia*cos(theta) + ib*cos(theta-2*pi/3) + ic*cos(theta+2*pi/3));
iq = 2/3*(ia*sin(theta) + ib*sin(theta-2*pi/3) + ic*sin(theta+2*pi/3));
i0 = 1/3*(ia + ib + ic); % 零序分量
end
3. 仿真建模与参数整定
3.1 Simulink模型搭建要点
搭建模型时有几个关键点需要注意:
- 开关器件选择:使用理想开关器件可以加快仿真速度,但会忽略死区时间影响。建议先用理想器件调试控制算法,再换用实际器件模型验证。
- 采样同步:PWM载波频率设为10kHz时,控制算法采样时间必须与之同步或整数倍关系,否则会产生次谐波。
- 解耦控制:在dq坐标系下,需要加入前馈解耦项:
code复制Vd = Vd' - ωLqIq Vq = Vq' + ωLdId
3.2 PI参数整定实战
仿真中使用的PI参数为Kp=0.8,Ki=2000,这个值是通过以下脚本暴力搜索得到的:
matlab复制% 自动遍历PI参数
for Kp = 0.5:0.1:1.5
for Ki = 1000:500:3000
set_param('APF_Model/Voltage_PI','P',num2str(Kp));
set_param('APF_Model/Voltage_PI','I',num2str(Ki));
sim('APF_Model');
if max(Vdc.Data)<820 && min(Vdc.Data)>790
disp(['找到靠谱参数: Kp=',num2str(Kp),' Ki=',num2str(Ki)]);
return
end
end
end
重要提示:判断PI参数好坏时,不能只看稳态值,必须检查动态过程中的最大/最小值以防过冲。我的经验是母线电压波动应控制在±1%以内(即792V~808V)。
4. 仿真结果分析与问题排查
4.1 性能指标对比
| 指标 | 控制前 | 控制后 |
|---|---|---|
| THD | 24% | <5% |
| 中线电流 | 10A | 2A |
| 母线电压波动 | ±50V | ±5V |
4.2 FFT分析技巧
使用Powergui的FFT工具时有两个关键技巧:
- 必须将分析周期数设为整数(如10个基波周期),否则会出现频谱泄漏,产生"假谐波"
- 建议设置窗函数为Hanning窗,可以有效减少栅栏效应
下图展示了控制前后的电流波形对比:
4.3 常见问题解决方案
问题1:中线电流补偿效果差
- 检查第四桥臂的Park变换是否包含零序分量
- 确认电流环带宽足够(建议>1kHz)
问题2:母线电压振荡
- 降低电压环比例系数Kp
- 增加电压环积分时间常数(减小Ki)
- 检查直流侧电容值是否合适
问题3:开关器件过热
- 增加死区时间(但会引入谐波)
- 降低开关频率(折衷方案)
- 检查散热参数设置
5. 进阶优化方向
5.1 改进控制算法
传统PI控制器在应对非线性负载时表现有限,可以考虑:
- 重复控制:对周期性谐波特别有效
- 模糊PI:自适应调整参数
- 滑模控制:强鲁棒性但存在抖振
5.2 参数自整定方法
比起暴力搜索,更智能的参数整定方法包括:
- Ziegler-Nichols法:通过临界比例度确定参数
- 频域法:根据开环频率特性设计
- 粒子群优化(PSO):智能优化算法
5.3 硬件在环测试
当Simulink仿真验证通过后,下一步建议:
- 使用dSPACE或RT-LAB进行硬件在环测试
- 逐步将理想元件替换为实际器件模型
- 加入传感器噪声和延迟等非理想因素
6. 工程实践经验分享
在实际调试中,有几个血泪教训值得分享:
-
初始参数选择:电压环的Ki值不宜过大,否则会导致启动时母线电压严重过冲。我的经验是从Ki=500开始逐步增加。
-
仿真步长设置:对于10kHz的开关频率,仿真步长不应大于1e-6s,否则会丢失开关细节。但这也意味着仿真速度变慢,需要在精度和效率间权衡。
-
接地问题:四桥臂系统的中性点接地方式会影响补偿性能。在Simulink中,建议先使用理想接地调试,再考虑实际接地阻抗。
-
数据保存技巧:仿真前务必设置好To Workspace模块的保存格式为"Array"而非"Structure",否则后续数据处理会很麻烦。
-
并行计算:参数扫描时启用Matlab的并行计算可以大幅节省时间。在命令窗口运行:
matlab复制parpool('local',4); % 启用4个worker
这个三相四桥臂APF仿真项目让我深刻体会到,电力电子控制就像高空走钢丝,参数间的微妙平衡决定系统成败。那些看似枯燥的公式背后,是无数工程师积累的经验智慧。当你看到THD从24%降到5%以下时,所有的调试痛苦都会烟消云散。