
1. 指针基础回顾与核心概念强化
在正式深入探讨高级指针主题前,让我们先夯实基础。指针本质上是一个存储内存地址的变量,这个简单的定义背后却蕴含着C语言最强大的能力。理解指针的关键在于区分三个核心概念:
- 指针变量本身:存储在栈区或静态区,占用固定大小(32位系统4字节,64位系统8字节)
- 指针所指向的地址:这个地址可能是堆区、栈区或数据区的某个位置
- 指针指向地址中存储的值:这才是我们最终要操作的数据
重要提示:指针的类型决定了指针运算时的步长。例如int指针+1实际地址增加4字节,而double指针+1则增加8字节。这个特性是理解数组与指针关系的基础。
1.1 指针声明的正确理解方式
很多初学者容易混淆指针声明中的*符号含义。实际上:
- 在声明语句中,
*表示"指向...的指针" - 在使用表达式时,
*表示"解引用"操作
c复制int *p; // 声明:p是一个指向int的指针
*p = 10; // 使用:对p解引用并赋值
1.2 指针与const的组合使用
const与指针结合使用时,位置不同含义截然不同:
c复制const int *p1; // 指向常量的指针:不能通过p1修改指向的值
int *const p2; // 常量指针:不能修改p2存储的地址
const int *const p3; // 指向常量的常量指针:既不能改地址也不能改值
实际工程中,第一种形式常用于函数参数,表示函数不会修改传入指针指向的内容,增强代码安全性。
2. 二级指针深度解析与应用场景
2.1 二级指针的本质理解
二级指针是指向指针的指针,这种间接访问的特性使其在特定场景下非常有用。理解二级指针的关键在于:
- 二级指针存储的是一级指针变量的地址
- 通过两次解引用才能访问到最终的数据
- 类型系统会严格检查指针层级
c复制int val = 42;
int *p = &val; // 一级指针
int **pp = &p; // 二级指针
2.2 二级指针的典型应用场景
场景1:修改函数外部的指针变量
这是二级指针最常见的用途。当需要在函数内部修改外部指针的指向时,必须传递指针的地址(即二级指针):
c复制void allocateMemory(char **ptr, size_t size) {
*ptr = malloc(size); // 修改外部指针的指向
if (*ptr == NULL) {
// 错误处理
}
}
int main() {
char *buffer = NULL;
allocateMemory(&buffer, 1024); // 传递指针的地址
// 使用buffer...
free(buffer);
return 0;
}
场景2:动态二维数组的实现
使用二级指针可以创建灵活的二维数组结构:
c复制int **create2DArray(int rows, int cols) {
int **arr = malloc(rows * sizeof(int*));
for (int i = 0; i < rows; i++) {
arr[i] = malloc(cols * sizeof(int));
}
return arr;
}
工程经验:这种动态二维数组在释放时需要逆向操作,先释放每一行,再释放行指针数组,否则会导致内存泄漏。
场景3:字符串数组的处理
处理字符串数组时,二级指针可以简化操作:
c复制void sortStrings(char **strings, int count) {
// 使用qsort等算法对字符串数组排序
}
int main() {
char *fruits[] = {"apple", "orange", "banana"};
sortStrings(fruits, 3);
return 0;
}
2.3 二级指针的内存模型图解
让我们通过内存模型来直观理解文章开头的示例代码:
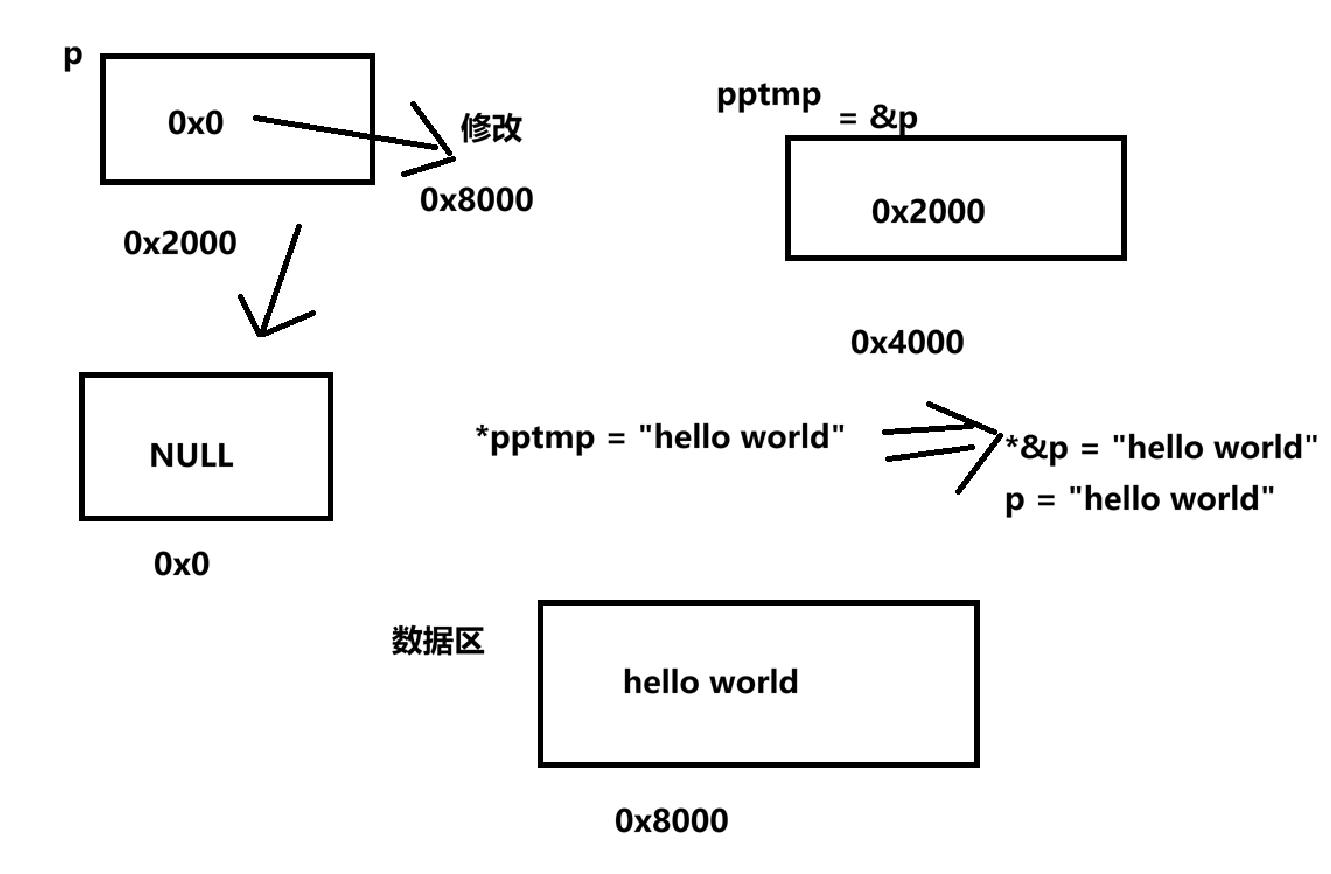
- 主函数中
char *p = NULL在栈上分配指针变量p,初始化为NULL fun(&p)将p的地址(假设为0x1000)压入栈传递给函数- 函数内部
pptmp参数获得值0x1000(即p的地址) *pptmp = "hello world"实际是修改0x1000处存储的值- 字符串常量"hello world"存储在只读数据区,地址假设为0x8000
- 函数返回后,p的值变为0x8000,指向字符串常量
3. void指针的灵活运用与限制
3.1 void指针的本质特性
void*是C语言中的通用指针类型,具有以下特点:
- 可以指向任意类型的数据
- 不能直接进行解引用操作(因为编译器不知道数据类型)
- 不能进行指针算术运算(因为不知道步长)
- 主要用于泛型编程和内存操作函数
c复制void *generic_ptr;
int x = 10;
float f = 3.14;
generic_ptr = &x; // 合法,不需要强制转换
generic_ptr = &f; // 同样合法
3.2 void指针的典型应用
应用1:内存操作函数
标准库中的内存操作函数普遍使用void指针:
c复制void *memcpy(void *dest, const void *src, size_t n);
void *memset(void *s, int c, size_t n);
int memcmp(const void *s1, const void *s2, size_t n);
应用2:动态内存分配
如文中提到的malloc函数返回void指针:
c复制int *nums = malloc(10 * sizeof(int)); // 隐式转换
double *values = (double*)malloc(20 * sizeof(double)); // 显式转换
最佳实践:虽然C允许void指针隐式转换,但显式类型转换能提高代码可读性并帮助发现潜在错误。
应用3:回调函数参数
在实现通用算法时,void指针可以传递任意类型数据:
c复制void qsort(void *base, size_t nmemb, size_t size,
int (*compar)(const void *, const void *));
3.3 void指针使用的注意事项
- 类型安全:使用void指针会绕过类型检查,容易引入难以发现的bug
- 对齐问题:某些架构对数据对齐有严格要求,void指针转换可能导致对齐错误
- 可读性:过度使用void指针会降低代码可读性
c复制// 危险示例:错误的类型假设
float *fptr = malloc(sizeof(float));
int *iptr = (int*)fptr; // 潜在的类型不匹配问题
*iptr = 10; // 可能破坏数据
4. volatile指针的底层原理与使用场景
4.1 volatile关键字的作用机制
volatile关键字告诉编译器:
- 该变量可能被程序之外的实体修改(如硬件、中断等)
- 禁止编译器对该变量的访问进行优化
- 每次访问都必须从内存中读取,不能使用寄存器中的缓存值
c复制volatile int *hardware_reg = (volatile int*)0x1234;
4.2 volatile指针的典型应用场景
场景1:内存映射硬件寄存器
嵌入式开发中,硬件寄存器通常映射到特定内存地址:
c复制#define PORT_A (*(volatile unsigned int*)0x40000000)
void configure_port() {
PORT_A = 0x01; // 写入配置
unsigned int status = PORT_A; // 读取状态
}
场景2:多线程共享变量
在多线程环境中,共享变量应声明为volatile:
c复制volatile int shared_flag = 0;
void thread_func() {
while (!shared_flag) {
// 等待标志位变化
}
}
注意:volatile不能替代正确的同步机制(如互斥锁),它只保证内存可见性,不保证原子性。
场景3:信号处理程序中的变量
信号处理函数中访问的全局变量应使用volatile:
c复制volatile sig_atomic_t signal_received = 0;
void handler(int sig) {
signal_received = 1;
}
4.3 volatile与const的组合使用
两者组合可以表示"只读的硬件寄存器":
c复制const volatile uint32_t *RO_REG = (uint32_t*)0xFFFF0000;
- const表示程序不能修改
- volatile表示内容可能被硬件改变
5. 指针数组与数组指针的深度辨析
5.1 指针数组的详细解析
指针数组本质是数组,其元素都是指针类型:
c复制// 声明一个包含5个int指针的数组
int *ptr_array[5];
5.1.1 指针数组的内存布局
假设有以下声明:
c复制char *str_array[3] = {"Hello", "World", "C"};
内存布局如下:
- str_array在栈上分配,包含3个指针(共24字节,64位系统)
- 每个指针指向只读数据区的字符串常量
- 字符串常量以null结尾存储在数据段
5.1.2 指针数组的初始化方式
指针数组有多种初始化方式:
c复制// 方式1:直接初始化
char *days1[] = {"Mon", "Tue", "Wed"};
// 方式2:先声明后赋值
char *days2[3];
days2[0] = "Mon";
days2[1] = "Tue";
days2[2] = "Wed";
// 方式3:动态分配
char **days3 = malloc(3 * sizeof(char*));
days3[0] = strdup("Mon"); // strdup会分配堆内存
days3[1] = strdup("Tue");
days3[2] = strdup("Wed");
内存管理注意:第三种方式使用后需要先释放每个字符串,再释放指针数组。
5.1.3 指针数组作为函数参数
如文中所述,指针数组作为参数传递时,实际传递的是指向第一个指针的指针(二级指针):
c复制void print_strings(char **strings, int count) {
for (int i = 0; i < count; i++) {
printf("%s\n", strings[i]);
}
}
5.2 数组指针的深入理解
数组指针是指向整个数组的指针,与指向数组首元素的指针有本质区别:
c复制int arr[5] = {1,2,3,4,5};
int (*arr_ptr)[5] = &arr; // 数组指针
int *elem_ptr = arr; // 指向首元素的指针
5.2.1 数组指针的内存模型
对于声明int (*p)[5]:
- p是一个指针,占用8字节(64位系统)
- p指向一个包含5个int的数组
- *p得到的是数组本身(类型是int[5])
- (*p)[i]访问数组元素
5.2.2 数组指针的典型应用
应用1:二维数组处理
数组指针最常用于处理二维数组:
c复制void process_matrix(int (*mat)[3], int rows) {
for (int i = 0; i < rows; i++) {
for (int j = 0; j < 3; j++) {
printf("%d ", mat[i][j]);
}
printf("\n");
}
}
int main() {
int matrix[2][3] = {{1,2,3}, {4,5,6}};
process_matrix(matrix, 2);
return 0;
}
应用2:数组的动态分配
可以结合malloc创建动态大小的数组指针:
c复制int (*create_array(int size))[5] {
int (*arr)[5] = malloc(size * sizeof(int[5]));
return arr;
}
5.2.3 数组指针与指针运算
数组指针的运算以整个数组为单位:
c复制int arr[3][4] = {0};
int (*p)[4] = arr; // 指向第一个包含4个int的数组
p++; // 移动sizeof(int[4])字节,即16字节(假设int为4字节)
5.3 多维数组与指针的关系
对于二维数组int arr[M][N]:
- arr的类型是
int [M][N] - arr[i]的类型是
int [N] - &arr的类型是
int (*)[M][N] - arr可以退化为
int (*)[N]类型的指针
访问元素的各种等价形式:
c复制arr[i][j]
*(arr[i] + j)
*(*(arr + i) + j)
(*(arr + i))[j]
6. 指针进阶技巧与实战经验
6.1 函数指针的高级用法
函数指针是指向函数的指针,在回调机制和动态调用中非常有用:
c复制// 函数指针类型定义
typedef int (*compare_func)(const void*, const void*);
// 使用函数指针
void sort_array(void *base, size_t nmemb, size_t size, compare_func cmp) {
// 实现排序算法
}
6.2 复杂指针声明的解读技巧
使用"从内到外,从右到左"规则解读复杂指针声明:
c复制int (*(*fp)(int))[10];
解读步骤:
- (*fp) - fp是一个指针
- (*fp)(int) - 指向接受int参数的函数
- *(*fp)(int) - 函数返回一个指针
- (*(*fp)(int))[10] - 指向包含10个元素的数组
- int (*(*fp)(int))[10] - 数组元素是int类型
6.3 指针与结构体的结合
结构体指针在系统编程中无处不在:
c复制typedef struct {
int id;
char name[32];
void (*print)(struct Person*);
} Person;
void print_person(Person *p) {
printf("ID: %d, Name: %s\n", p->id, p->name);
}
Person p1 = {1, "Alice", print_person};
p1.print(&p1); // 通过函数指针调用
6.4 指针的安全使用规范
- 初始化规则:声明指针后立即初始化为NULL或有效地址
- 空指针检查:对可能为NULL的指针进行判空
- 野指针防护:释放内存后立即将指针置NULL
- 边界检查:确保指针运算不会越界
- 类型安全:避免危险的强制类型转换
c复制// 安全使用示例
int *safe_pointer = NULL;
if (condition) {
safe_pointer = malloc(sizeof(int) * 10);
if (safe_pointer == NULL) {
// 错误处理
}
}
// 使用后清理
free(safe_pointer);
safe_pointer = NULL;
7. 常见指针问题与调试技巧
7.1 典型指针错误案例分析
案例1:悬垂指针
c复制int *create_int() {
int x = 10;
return &x; // 返回局部变量的地址
} // x的生命周期结束
void dangling_pointer() {
int *p = create_int();
*p = 20; // 未定义行为
}
案例2:内存泄漏
c复制void memory_leak() {
char *str = malloc(100);
// 使用str...
// 忘记free(str)
}
案例3:错误的指针运算
c复制int arr[5] = {1,2,3,4,5};
int *p = arr;
p += 10; // 越界访问
*p = 10; // 未定义行为
7.2 指针问题的调试方法
- 使用调试器:gdb等工具可以检查指针值和内存内容
- 打印指针信息:
c复制printf("指针地址:%p,指向的值:%d\n", (void*)p, *p); - 内存检测工具:valgrind可以检测内存泄漏和非法访问
- 防御性编程:添加断言检查指针有效性
c复制assert(p != NULL);
7.3 指针相关的编译器警告
启用所有编译器警告可以捕捉许多指针问题:
bash复制gcc -Wall -Wextra -pedantic -o program program.c
特别注意:
- 未初始化的指针
- 类型不匹配的指针赋值
- 可疑的指针运算
- 函数返回局部变量地址
8. 嵌入式系统中的指针特殊考量
8.1 内存受限环境下的指针使用
嵌入式系统往往资源有限,指针使用需特别注意:
- 避免过度间接寻址:多级指针会增加代码大小和执行时间
- 谨慎使用动态内存:碎片化可能成为问题
- 考虑使用池分配器:固定大小的内存块管理
- 注意对齐要求:某些架构对数据访问有严格对齐要求
8.2 寄存器访问模式
嵌入式开发中常用指针访问硬件寄存器:
c复制#define GPIO_BASE 0x40020000
typedef struct {
volatile uint32_t MODER;
volatile uint32_t OTYPER;
// 其他寄存器...
} GPIO_TypeDef;
#define GPIOA ((GPIO_TypeDef*)GPIO_BASE)
void configure_gpio() {
GPIOA->MODER = 0xAB00; // 配置模式寄存器
GPIOA->OTYPER = 0x00; // 推挽输出
}
8.3 中断上下文中的指针安全
中断处理函数中使用指针需特别小心:
- 共享数据必须声明为volatile
- 确保指针指向的内存有效
- 避免在中断中进行复杂的内存操作
- 考虑使用无锁数据结构
c复制volatile uint32_t *shared_buffer;
volatile int buffer_ready = 0;
void ISR() {
// 填充shared_buffer...
buffer_ready = 1;
}
void main_loop() {
while (1) {
if (buffer_ready) {
// 处理shared_buffer数据...
buffer_ready = 0;
}
}
}
9. 现代C标准中的指针特性
9.1 C11中的安全指针特性
C11引入了一些增强指针安全的特性:
- 边界检查:
_Bounds注解(可选特性) - 空指针检查:
_Null_unspecified等注解 - 生命周期分析:
_Ptr等限定符
c复制void copy_array(_Array_ptr<int> dest : count(len),
_Array_ptr<const int> src : count(len),
size_t len);
9.2 指针与泛型选择
C11的_Generic可以与指针类型结合实现类型安全:
c复制#define print_value(x) _Generic((x), \
int *: print_int, \
double *: print_double \
)(x)
void print_int(int *p) { printf("%d\n", *p); }
void print_double(double *p) { printf("%f\n", *p); }
9.3 原子指针操作
C11提供了原子指针操作,适合多线程环境:
c复制#include <stdatomic.h>
atomic_intptr_t atomic_ptr = ATOMIC_VAR_INIT(NULL);
void thread_func() {
int x = 10;
atomic_store(&atomic_ptr, &x);
int *p = atomic_load(&atomic_ptr);
}
10. 性能优化中的指针技巧
10.1 指针与缓存友好代码
合理使用指针可以提高缓存命中率:
- 顺序访问:指针遍历数组比随机访问更高效
- 结构体布局:将频繁访问的字段放在一起
- 避免指针追逐:减少多级间接寻址
c复制// 缓存不友好的结构体
struct BadLayout {
int id;
char *name; // 需要额外指针解引用
int age;
};
// 缓存友好的结构体
struct GoodLayout {
int id;
int age;
char name[32]; // 内联存储
};
10.2 指针别名与restrict关键字
restrict关键字告诉编译器指针不会别名,允许优化:
c复制void add_arrays(int *restrict a, int *restrict b, int *restrict c, int n) {
for (int i = 0; i < n; i++) {
c[i] = a[i] + b[i];
}
}
10.3 手写内存拷贝优化
使用指针实现高效的内存操作:
c复制void fast_memcpy(void *restrict dst, const void *restrict src, size_t n) {
uint64_t *d = dst;
const uint64_t *s = src;
while (n >= 8) {
*d++ = *s++;
n -= 8;
}
// 处理剩余字节...
}
11. 实际工程中的指针设计模式
11.1 对象句柄模式
使用指针创建抽象接口:
c复制typedef struct {
void *internal_data;
int (*open)(void *);
int (*read)(void *, char *, int);
// 其他操作...
} FileHandle;
FileHandle *create_file_handle(const char *path) {
FileHandle *fh = malloc(sizeof(FileHandle));
// 初始化内部数据和函数指针...
return fh;
}
11.2 策略模式通过函数指针
使用函数指针实现运行时多态:
c复制typedef int (*SortStrategy)(int *, int);
int bubble_sort(int *arr, int n) { /* 实现 */ }
int quick_sort(int *arr, int n) { /* 实现 */ }
void sort_using_strategy(int *arr, int n, SortStrategy strategy) {
strategy(arr, n);
}
11.3 链表与树结构实现
指针是构建数据结构的核心:
c复制typedef struct Node {
int data;
struct Node *next;
} Node;
void list_append(Node **head, int value) {
Node *new_node = malloc(sizeof(Node));
new_node->data = value;
new_node->next = NULL;
if (*head == NULL) {
*head = new_node;
} else {
Node *current = *head;
while (current->next != NULL) {
current = current->next;
}
current->next = new_node;
}
}
12. 指针学习的进阶路径
12.1 推荐学习资源
-
书籍:
- 《C和指针》- Kenneth A. Reek
- 《深入理解C指针》- Richard Reese
- 《C陷阱与缺陷》- Andrew Koenig
-
在线资源:
- C语言标准文档
- 编译器文档(如GCC的指针相关选项)
- 开源项目代码(如Linux内核)
12.2 实践项目建议
- 实现自己的内存池分配器
- 编写通用容器库(动态数组、链表、哈希表)
- 解析复杂指针声明工具
- 构建简单的虚拟机或解释器
12.3 调试技能培养
- 学习使用gdb检查指针和内存
- 掌握valgrind等内存检测工具
- 编写单元测试验证指针操作
- 研究系统级的地址空间布局
13. 指针与C++智能指针的对比
虽然本文聚焦C语言指针,但了解C++的智能指针有助于拓宽视野:
- unique_ptr:独占所有权,类似C中的严格所有权管理
- shared_ptr:引用计数,解决共享所有权问题
- weak_ptr:解决循环引用问题
C程序员可以借鉴这些概念来设计更安全的指针使用规范。
14. 指针在系统编程中的特殊应用
14.1 内存映射文件
使用指针直接访问文件内容:
c复制#include <sys/mman.h>
void map_file(const char *filename) {
int fd = open(filename, O_RDONLY);
void *mapped = mmap(NULL, file_size, PROT_READ, MAP_PRIVATE, fd, 0);
// 现在可以像使用内存一样使用mapped指针...
munmap(mapped, file_size);
close(fd);
}
14.2 自引用结构
指针使得自引用数据结构成为可能:
c复制typedef struct TreeNode {
int value;
struct TreeNode *left;
struct TreeNode *right;
} TreeNode;
14.3 函数式编程技巧
使用函数指针实现高阶函数:
c复制void map(int *arr, int n, int (*f)(int)) {
for (int i = 0; i < n; i++) {
arr[i] = f(arr[i]);
}
}
int square(int x) { return x * x; }
int main() {
int nums[5] = {1,2,3,4,5};
map(nums, 5, square);
return 0;
}
15. 指针安全的最新研究与发展
15.1 CHERI架构与能力指针
CHERI是一种新型处理器架构,通过能力指针增强安全性:
- 每个指针携带额外的元数据(边界、权限等)
- 硬件强制检查指针有效性
- 可以防止缓冲区溢出等常见攻击
15.2 Rust的所有权系统
Rust语言的所有权概念为解决指针安全问题提供了新思路:
- 编译时检查所有权和生命周期
- 没有数据竞争和悬垂指针
- 可以与C安全交互
15.3 形式化验证工具
现代验证工具可以数学证明指针操作的正确性:
- Frama-C
- seL4微内核验证
- LLVM验证工具
16. 指针艺术的个人实践心得
经过多年C语言开发,我总结出以下指针使用心得:
- 清晰胜于聪明:复杂的指针操作可能看起来很酷,但难以维护
- 文档是关键:为复杂的指针使用添加详细注释
- 防御性编程:总是检查指针有效性
- 渐进式复杂:从简单指针开始,逐步构建复杂用法
- 工具辅助:充分利用静态分析工具和调试器
指针就像一把双刃剑,用好了可以写出高效灵活的代码,用不好则会引入难以发现的bug。掌握指针需要理论学习和实践经验的结合,希望本文能帮助读者在指针学习的道路上更进一步。