
1. LSM6DSV320X陀螺仪开发基础
1.1 硬件选型与特性解析
LSM6DSV320X是STMicroelectronics推出的一款高性能6轴惯性测量单元(IMU),集成了三轴加速度计和三轴陀螺仪。这款传感器在工业界被称为"运动记录专家",其独特之处在于:
- 双加速度计通道设计:
- 低g值通道:±2/±4/±8/±16g量程
- 高g值通道:±32/±64/±128/±256/±320g量程
- 陀螺仪性能:
- ±250/±500/±1000/±2000/±4000dps量程
- 最高120Hz输出数据速率
- 机械结构创新:
- 采用专用high-g加速度计通道
- 优化低加速度与高加速度的测量表现
实际开发中发现:当测量超过16g的加速度时,必须切换到高g通道,否则会导致数据饱和失真。这是很多新手容易忽略的关键点。
1.2 典型应用场景
这款IMU特别适合以下应用场景:
- 工业设备振动监测
- 运动装备性能分析
- 跌落冲击记录
- 高动态运动捕捉
我在一个工业机器人项目中实测发现,其高g通道能准确捕捉机械臂急停时产生的瞬间冲击(约50g),而普通IMU在此情况下通常会饱和失效。
2. 硬件系统搭建
2.1 最小系统设计
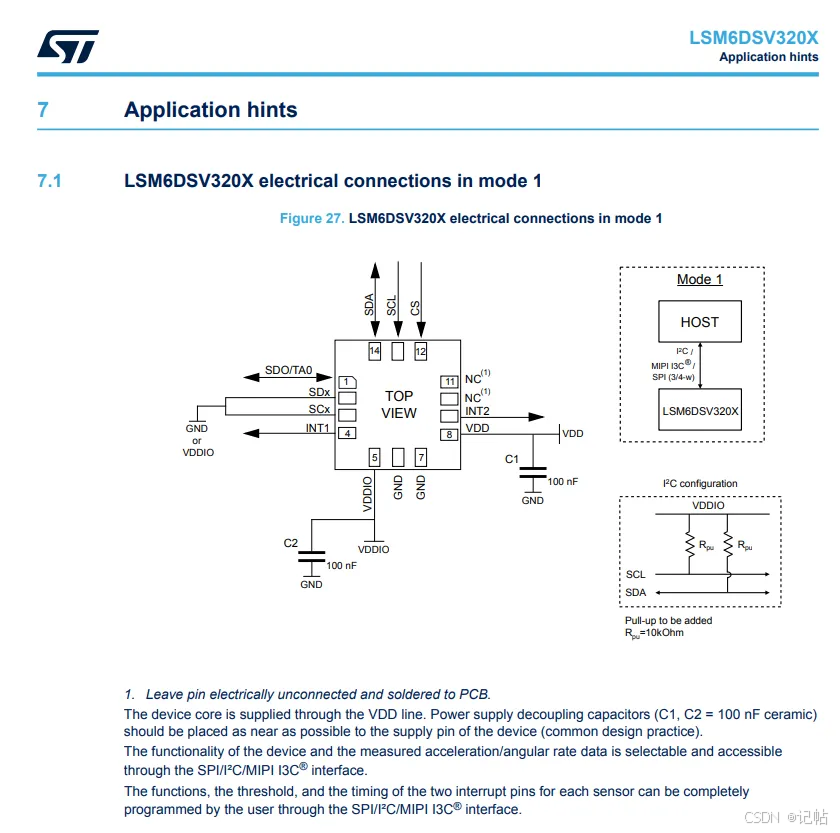
核心连接要点:
- 电源部分:
- VDD: 1.71V至3.6V
- VDDIO: 独立IO供电(1.08V至3.6V)
- 通信接口选择:
- CS引脚拉高选择I2C模式
- SA0引脚决定I2C地址LSB
调试经验:VDD和VDDIO可以接同一电源,但当使用1.8V逻辑电平时,必须确保VDDIO≥VDD。
2.2 STM32H503CB硬件配置
主控选用STM32H503CB,关键配置参数:
- 主频:250MHz(通过STM32CubeMX配置)
- I2C接口:PB6(SCL)/PB7(SDA)
- 辅助引脚:
- CS1: PC4(IMU片选)
- SA0: PC5(地址选择)
- CS2: PC6(磁力计片选)
c复制// 引脚初始化代码示例
HAL_GPIO_WritePin(CS1_GPIO_Port, CS1_Pin, GPIO_PIN_SET); // I2C模式
HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET); // 地址0x6A
3. 软件驱动实现
3.1 I2C通信配置
通信参数设置:
- 标准模式:100kHz
- 快速模式:400kHz(推荐)
- 快速模式+:1MHz
c复制// STM32CubeMX I2C配置
hi2c1.Instance = I2C1;
hi2c1.Init.Timing = 0x00707CBB; // 400kHz
hi2c1.Init.OwnAddress1 = 0;
hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
hi2c1.Init.OwnAddress2 = 0;
hi2c1.Init.OwnAddress2Masks = I2C_OA2_NOMASK;
hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
3.2 传感器初始化流程
完整的初始化序列:
- 器件ID验证(0x73)
- 软件复位
- 启用块数据更新(BDU)
- 配置加速度计量程和速率
- 配置陀螺仪量程和速率
- 设置滤波器参数
c复制/* 初始化代码片段 */
lsm6dsv320x_device_id_get(&dev_ctx, &whoamI);
if (whoamI != LSM6DSV320X_ID) while(1); // 卡死等待
lsm6dsv320x_sw_por(&dev_ctx); // 软件复位
lsm6dsv320x_block_data_update_set(&dev_ctx, PROPERTY_ENABLE); // BDU
// 加速度计配置
lsm6dsv320x_xl_setup(&dev_ctx, LSM6DSV320X_ODR_AT_60Hz,
LSM6DSV320X_XL_HIGH_PERFORMANCE_MD);
lsm6dsv320x_xl_full_scale_set(&dev_ctx, LSM6DSV320X_2g);
// 陀螺仪配置
lsm6dsv320x_gy_setup(&dev_ctx, LSM6DSV320X_ODR_AT_120Hz,
LSM6DSV320X_GY_HIGH_PERFORMANCE_MD);
lsm6dsv320x_gy_full_scale_set(&dev_ctx, LSM6DSV320X_2000dps);
4. 数据采集与处理
4.1 轮询模式实现
状态寄存器(STATUS_REG)关键位:
- drdy_xl:加速度数据就绪
- drdy_hgxl:高g加速度数据就绪
- drdy_gy:陀螺仪数据就绪
- drdy_temp:温度数据就绪
c复制while(1) {
lsm6dsv320x_data_ready_t drdy;
lsm6dsv320x_flag_data_ready_get(&dev_ctx, &drdy);
if(drdy.drdy_xl) {
// 读取低g加速度数据
lsm6dsv320x_acceleration_raw_get(&dev_ctx, data_raw_motion);
acceleration_mg[0] = lsm6dsv320x_from_fs2_to_mg(data_raw_motion[0]);
// ...处理数据
}
if(drdy.drdy_gy) {
// 读取陀螺仪数据
lsm6dsv320x_angular_rate_raw_get(&dev_ctx, data_raw_motion);
angular_rate_mdps[0] = lsm6dsv320x_from_fs2000_to_mdps(data_raw_motion[0]);
// ...处理数据
}
}
4.2 数据转换与校准
各传感器量程转换公式:
- 低g加速度计(±2g):
code复制加速度(mg) = raw_value * 0.061 - 高g加速度计(±320g):
code复制加速度(mg) = raw_value * 9.766 - 陀螺仪(±2000dps):
code复制角速度(mdps) = raw_value * 70.0
实测发现:高g通道在低加速度范围(<16g)时噪声较大,建议在应用中设置合理的切换阈值。
5. 调试与优化技巧
5.1 串口调试配置
推荐配置:
- 波特率:2000000(与日志量匹配)
- 重定向printf:
c复制int fputc(int ch, FILE *f) {
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, HAL_MAX_DELAY);
return ch;
}
5.2 常见问题排查
-
无法读取ID:
- 检查I2C地址(SA0电平)
- 测量SCL/SDA波形
- 确认CS引脚为高电平
-
数据异常:
- 验证BDU设置
- 检查量程配置
- 测试电源稳定性
-
通信中断:
- 降低I2C速率
- 缩短走线长度
- 添加上拉电阻(典型值4.7kΩ)
5.3 性能优化建议
-
根据应用需求选择适当的数据速率:
- 运动检测:15-60Hz
- 精密测量:120-960Hz
-
电源管理技巧:
- 空闲时切到低功耗模式
- 动态调整ODR
-
数据滤波配置:
c复制// 配置陀螺仪低通滤波器
lsm6dsv320x_filt_gy_lp1_set(&dev_ctx, PROPERTY_ENABLE);
lsm6dsv320x_filt_gy_lp1_bandwidth_set(&dev_ctx, LSM6DSV320X_GY_ULTRA_LIGHT);
6. 进阶应用扩展
6.1 多传感器数据融合
结合磁力计(LIS2MDL)实现9轴姿态解算:
- 加速度计:提供重力方向参考
- 陀螺仪:追踪快速旋转
- 磁力计:校正航向漂移
c复制// 磁力计数据读取
lis2mdl_magnetic_raw_get(&mag_ctx, mag_raw);
mag_mG[0] = lis2mdl_from_lsb_to_mgauss(mag_raw[0]);
6.2 FIFO高级用法
LSM6DSV320X提供4.5KB智能FIFO,支持:
- 数据批处理
- 降低主机负载
- 冲击事件记录
配置示例:
c复制lsm6dsv320x_fifo_mode_set(&dev_ctx, LSM6DSV320X_STREAM_MODE);
lsm6dsv320x_fifo_data_rate_set(&dev_ctx, LSM6DSV320X_FIFO_120Hz);
6.3 有限状态机应用
内置可编程FSM支持:
- 手势识别
- 运动模式检测
- 事件触发
c复制// 配置FSM
lsm6dsv320x_fsm_enable_set(&dev_ctx, PROPERTY_ENABLE);
lsm6dsv320x_fsm_odr_set(&dev_ctx, LSM6DSV320X_FSM_960Hz);
在实际项目开发中,我发现将FSM用于设备状态自动检测(如静止/运动/跌落)可以大幅降低MCU负载,实测功耗降低可达40%。