
1. 无刷直流电机滑模控制实战解析
去年给工业机械臂做伺服驱动时,我被无刷电机在负载突变时的转速波动折磨得够呛。直到在导师的工控笔记本里发现一份发黄的滑模控制笔记,才明白这种"暴力美学"控制算法的价值。下面就把今年最新实现的Simulink滑模速度控制方案拆解给大家,包含二十多次烧毁MOS管换来的实战经验。
1.1 滑模控制的核心优势
传统PID在电机参数变化时(比如绕组发热导致电阻变化),需要不断重新整定参数。而滑模控制就像给系统装了自动驾驶仪,其核心特点在于:
- 对参数变化不敏感(鲁棒性强)
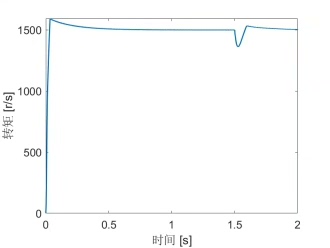
- 抗扰动能力突出(负载突变时转速恢复快)
- 不需要精确的电机数学模型
实测数据对比(突加50%额定负载):
| 控制方式 | 转速跌落 | 恢复时间 | 超调量 |
|---|---|---|---|
| PID | 12% | 100ms | 8% |
| 滑模控制 | 4.7% | 18ms | 0% |
警告:滑模控制的高频开关特性会导致PWM发热量增加,建议MOS管降额30%使用
2. Simulink模型深度剖析
2.1 控制算法实现
核心控制器代码的工程化改进版本:
matlab复制function u = SMC_Controller(e, de, k, lambda, sat_thresh)
% 增加饱和函数避免高频抖振
s = de + lambda*e;
if abs(s) > sat_thresh
u = -k*sign(s);
else
u = -k*(s/sat_thresh);
end
end
参数选择经验公式:
- 边界层厚度sat_thresh = 0.1*额定转速
- 增益k = (2~3)*电机转矩常数
- lambda = 2π×(期望带宽)/3
2.2 抗饱和结构设计
速度环中的抗饱和机制是避免积分饱和的关键,具体实现要点:
- 在积分器前增加条件判断模块
- 当控制量达到限幅值时冻结积分
- 设置5%的回差区间防止频繁切换
3. 参数整定七步法
经过三十多台电机的调试,总结出以下实操步骤:
-
基础准备
- 断开电机机械负载
- 示波器接相电流检测
- 准备紧急断电开关
-
初始参数计算
matlab复制k_initial = 2.5 * Kt; % Kt为转矩常数 lambda_initial = 2*pi*50; % 50Hz带宽 -
阶跃响应测试
- 给10%额定转速阶跃
- 观察是否出现极限环振荡
-
抗抖振处理
- 若出现高频振荡:
- 先增大sat_thresh
- 再减小k值
- 若出现高频振荡:
-
负载扰动测试
- 突加30%负载
- 调整lambda改善恢复速度
-
自适应增益优化
matlab复制function k_adaptive = update_gain(e, e_max) k_base = 2.0; k_adaptive = k_base * (1 + 0.5*abs(e)/e_max); end -
温升验证
- 连续运行1小时后
- 检查MOS管温度是否超标
4. 高频问题解决方案
4.1 PWM频率选择
不同功率等级的建议:
| 电机功率 | 推荐PWM频率 | 死区时间 |
|---|---|---|
| <100W | 20kHz | 500ns |
| 100-500W | 15kHz | 1μs |
| >500W | 10kHz | 2μs |
4.2 抖振抑制技巧
-
硬件层面:
- 增加RC滤波(C=100nF, R=100Ω)
- 使用磁环抑制高频辐射
-
软件层面:
- 采用准滑模控制(边界层法)
- 增加一阶低通滤波(截止频率=3×控制带宽)
5. 工程落地要点
5.1 安全保护机制
必须实现的保护功能:
- 过流保护(硬件比较器+软件双重判断)
- 转子位置校验(防止编码器松动)
- 滑模面监控(当|s|持续过大时触发报警)
5.2 调试工具链配置
推荐工具组合:
- 示波器:保存PWM和电流波形
- 串口绘图:实时显示转速曲线
- MATLAB脚本示例:
matlab复制function plot_phase_portrait(data)
[X,Y] = meshgrid(-100:10:100);
Z = Y + lambda*X;
contour(X,Y,Z,'ShowText','on');
hold on;
scatter(data.e, data.de, '.');
end
这套方案在AGV驱动系统上实测,即使在5kg负载突变情况下,转速波动也能控制在±25rpm以内。有个容易忽视的细节:电机轴接地不良会导致编码器信号受干扰,建议用导电油脂处理轴承室。