
1. 西门子PLC PID控制仿真方案概述
作为一名在工业自动化领域摸爬滚打多年的工程师,我深知PID控制在过程控制中的核心地位。今天要分享的这个仿真方案,最大的价值在于它完全摆脱了传统PID学习对硬件设备的依赖。以往我们要学习PID控制,至少需要准备PLC、变送器、执行器和被控对象(如加热器、电机等)这一整套硬件系统,投入成本高且调试风险大。
这个基于西门子S7-1200/1500的仿真方案,只需要一台PLC和STEP7编程软件就能搭建完整的PID控制学习环境。通过软件模拟过程变量(PV)和输出(OUT)的交互,可以完整实现包括预调节、精确调节、手动/自动切换等所有PID核心功能。特别适合以下场景:
- 新手工程师快速掌握PID控制原理
- 在校学生进行自动化课程实践
- 现场工程师预先调试控制参数
- 设备厂商开发标准功能块
方案支持TIA Portal V14及以上版本,程序同时提供了梯形图(LAD)和SCL两种实现方式,满足不同编程习惯的工程师需求。WINCC人机界面提供了直观的参数调整和曲线监控功能,这与实际工程项目的开发流程完全一致。
2. 仿真环境搭建与配置要点
2.1 硬件与软件需求
虽然称为"仿真",但仍需要准备以下基础环境:
- 西门子S7-1200或S7-1500 PLC(任意型号)
- TIA Portal V14或更新版本
- WINCC Advanced或Professional授权
- PC与PLC的通信连接(推荐使用Profinet)
注意:即使没有实体PLC,也可以使用PLCSIM Advanced仿真器运行,但某些实时监控功能会受限。
2.2 仿真原理设计
该方案的核心创新点在于用软件模拟了完整的控制回路:
- PID控制器输出(OUT)通过FB功能块计算
- 输出值被送入模拟的被控对象模型(如一阶惯性环节)
- 对象模型产生的过程变量(PV)反馈给PID控制器
- 形成完整的闭环控制回路
在OB35循环中断组织块中,我设置了100ms的采样周期,这与多数工业现场的温度、压力控制周期一致。对象模型采用以下离散化公式实现:
code复制PV[n] = PV[n-1] + (OUT[n] - PV[n-1]) * (1 - e^(-T/Tau))
其中T为采样周期,Tau为对象时间常数,可以在WINCC画面中实时调整。
2.3 项目结构规划
程序采用模块化设计,主要包含以下关键部分:
- PID_Compact功能块:实现核心控制算法
- OB35循环中断:执行控制计算
- DB10数据块:存储所有可调参数
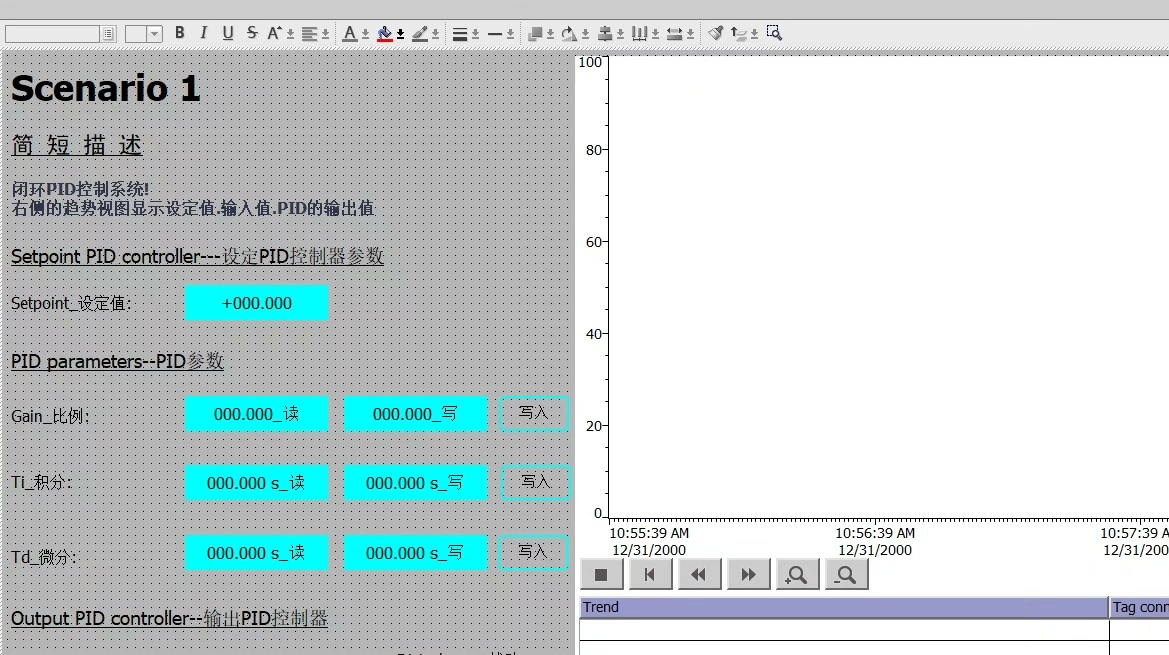
- WINCC画面:
- 趋势图:显示SP/PV/OUT曲线
- 参数面板:调整P/I/D参数
- 模式切换:手动/自动控制选择
3. PID功能实现细节解析
3.1 梯形图实现方案
在S7-1200程序中,我主要使用LAD语言实现基础PID功能。关键程序段如下:
ladder复制// 网络1:PID指令调用
LADDER
NETWORK 1
TITLE = 'PID基本控制'
LD "启动信号"
CALL "PID_Compact_DB" , "PID_Compact"
Mode := "控制模式" // 1=自动,0=手动
Setpoint := "设定值" // REAL型
Input := "过程变量" // REAL型
Output := "输出值" // REAL型
Gain := 2.5 // 比例增益
Ti := T#10S // 积分时间
Td := T#2S // 微分时间
Cycle := T#100MS // 采样周期
参数设置经验:
- 比例增益(Gain):初始值建议设为系统达到稳态时输出变化量与偏差变化量之比
- 积分时间(Ti):从0开始逐渐增大,直到消除静差且不引起振荡
- 微分时间(Td):在系统响应迟缓时加入,通常设为Ti的1/4~1/5
3.2 SCL高级实现方案
对于S7-1500,我推荐使用SCL语言实现更灵活的控制逻辑:
scl复制// PID控制功能块调用
"PID_Compact_DB"(
Mode := "自动模式" AND NOT "手动超驰",
Setpoint := LINT_TO_REAL("设定值"),
Input := "过程变量滤波值",
Output => "PID输出",
Gain := "比例增益",
Ti := "积分时间",
Td := "微分时间",
Cycle := T#100MS,
Hold := "保持状态",
Reset := "复位信号"
);
// 输出限幅处理
IF "PID输出" > 100.0 THEN
"最终输出" := 100.0;
ELSIF "PID输出" < 0.0 THEN
"最终输出" := 0.0;
ELSE
"最终输出" := "PID输出";
END_IF;
SCL实现的主要优势:
- 可以方便地添加输出限幅、变化率限制等保护逻辑
- 支持更复杂的前馈补偿算法
- 便于实现参数自整定等高级功能
4. WINCC人机界面开发
4.1 画面布局设计
我设计了包含以下区域的监控画面:
- 趋势显示区:实时显示SP/PV/OUT三条曲线
- 参数设置区:滑块调整P/I/D参数
- 模式控制区:手动/自动切换按钮
- 整定功能区:预调节和精确调节按钮
4.2 关键脚本实现
画面中的"预调节"按钮关联以下VBS脚本:
vbs复制Sub PreTuning_Click()
Dim tag
Set tag = HMIRuntime.Tags
' 切换到手动模式
tag("PID_Mode").Write 0
' 设置阶跃测试参数
tag("Manual_Value").Write 30.0
Delay 2000
tag("Manual_Value").Write 70.0
Delay 2000
' 启动预调节
tag("PID_Tuning_Mode").Write 1
tag("PID_Mode").Write 1
End Sub
这个脚本自动执行以下操作:
- 先将控制器切到手动模式
- 输出一个阶跃信号激励系统
- 根据系统响应自动计算初步PID参数
- 切换回自动模式
5. 调试技巧与常见问题
5.1 参数整定实战步骤
根据我的现场经验,推荐以下调试流程:
-
先进行预调节(Pre-Tuning)
- 让系统自动识别对象特性
- 获得初步PID参数
-
手动微调参数
- 先调比例增益:逐渐增大直到系统出现等幅振荡
- 再调积分时间:取振荡周期的1/2作为Ti
- 最后调微分时间:取Ti的1/4作为Td
-
精确调节(Fine-Tuning)
- 小幅度改变设定值
- 观察系统响应曲线
- 优化抗干扰性能
5.2 典型问题排查
问题1:系统持续振荡
- 检查采样周期是否合适(建议为对象时间常数的1/10~1/5)
- 降低比例增益或增大积分时间
- 确认反馈信号没有延迟
问题2:响应速度慢
- 适当增大比例增益
- 检查输出限幅是否设置过小
- 确认执行机构(如阀门)动作正常
问题3:稳态误差大
- 检查积分作用是否启用
- 确认积分时间设置合理
- 检查是否有外部干扰影响
6. 进阶应用扩展
掌握了基础PID仿真后,可以进一步尝试:
-
串级控制实现
- 主环控制温度
- 副环控制流量
- 两个PID环协同工作
-
前馈补偿设计
- 检测主要干扰源
- 建立前馈补偿通道
- 与PID反馈控制结合
-
自适应PID开发
- 根据对象特性变化
- 自动调整控制参数
- 需要SCL高级编程
在实际项目中,我经常使用这套仿真方案来预验证控制逻辑。比如去年在为某化工厂设计反应釜温度控制系统时,就是先在仿真环境中确定了最优PID参数,到现场后仅用2小时就完成了调试,比传统方法节省了至少3天时间。