
1. 项目背景与设计思路
作为一名嵌入式系统开发者,我最近完成了一个基于AT89C51单片机和ISD4004语音芯片的语音存储与回放系统。这个项目的初衷是想解决传统语音记录设备体积大、操作复杂、音质差的问题。在实际生活中,我们经常需要记录和回放语音信息,比如会议记录、语音备忘录等场景,但市面上很多设备要么价格昂贵,要么使用体验不佳。
经过多方调研,我最终选择了ISD4004这款语音芯片。它最大的特点就是可以直接存储模拟语音信号,不需要经过复杂的模数转换过程。这意味着我们可以获得更好的音质,同时简化电路设计。与单片机配合使用,整个系统的成本可以控制在很低的水平,非常适合DIY爱好者和学生项目。
提示:ISD4004芯片采用多级存储技术,能够实现高质量语音录制,最长录音时间可达16分钟(具体取决于采样率设置),而且支持10万次重复擦写。
2. 系统方案设计与选型
2.1 方案对比分析
在项目初期,我主要考虑了两个设计方案:
方案一:传统ADC/DAC转换方案
- 使用麦克风采集语音信号
- 通过运算放大器放大信号
- 经过抗混叠滤波器处理
- 使用ADC芯片转换为数字信号
- 单片机存储数字信号
- 回放时反向操作,通过DAC转换回模拟信号
这个方案的优点是理论成熟,但实际调试中发现几个严重问题:
- 信号链路过长,容易引入噪声
- ADC/DAC转换会导致音质损失
- 需要额外的压缩算法处理数据
- 硬件电路复杂,调试困难
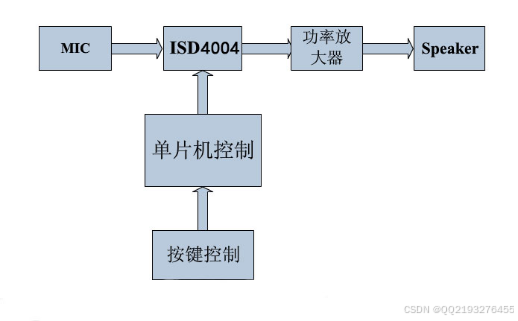
方案二:ISD4004语音芯片方案
- 语音信号直接输入ISD4004芯片
- 单片机通过SPI接口控制芯片
- 语音数据存储在芯片内部闪存中
- 回放时直接从芯片输出模拟信号
经过实测对比,方案二具有明显优势:
- 电路简洁,外围元件少
- 无需信号转换,音质更好
- 抗干扰能力强
- 开发调试更简单
2.2 核心器件选型
主控芯片:AT89C51
- 经典的51单片机,资源丰富
- 12MHz主频足够控制语音芯片
- 价格低廉,开发资料齐全
- 4个I/O端口满足控制需求
语音芯片:ISD4004-16MP
- 支持16分钟录音时长
- 3V单电源供电,低功耗
- 直接模拟存储,无需压缩
- SPI接口控制简单
- 内置抗混叠滤波器和自动增益控制
其他关键器件:
- LM386音频功率放大器
- 16x2字符型LCD显示屏
- 轻触按键开关
- 8Ω/0.5W扬声器
3. 硬件电路设计与实现
3.1 系统架构设计
整个系统分为三大模块:
- 控制模块:AT89C51最小系统
- 语音处理模块:ISD4004及其外围电路
- 人机交互模块:按键、LCD和扬声器
3.2 单片机最小系统
AT89C51最小系统包括:
- 复位电路:10kΩ电阻+10μF电容
- 时钟电路:12MHz晶振+30pF电容×2
- EA引脚接高电平
- P0口需要10kΩ排阻上拉
注意:ISD4004的工作电压是3V,而AT89C51是5V系统,需要电平转换或分压电阻处理信号线。
3.3 语音录放电路
ISD4004的典型应用电路:
- 麦克风输入:通过1μF电容耦合到ANA IN引脚
- 音频输出:AUD OUT引脚经10kΩ电位器调节音量后送功放
- 控制接口:SPI总线(CS,SCLK,MOSI,MISO)
- 电源滤波:0.1μF去耦电容靠近芯片放置
3.4 功率放大器设计
采用LM386构成典型音频功放:
- 增益设置:1.2kΩ电阻+10μF电容(增益约50倍)
- 输出耦合:220μF电容隔离直流
- 旁路电容:0.05μF改善高频响应
- 注意:PCB布局时应尽量缩短输出走线
4. 软件设计与实现
4.1 开发环境搭建
使用Keil μVision4开发环境:
- 新建AT89C51工程
- 配置输出HEX文件选项
- 设置正确的晶振频率(12MHz)
- 编写汇编语言源代码
- 编译生成可执行文件
4.2 主程序设计
系统主程序采用状态机设计:
assembly复制ORG 0000H
LJMP MAIN
ORG 0030H
MAIN:
MOV SP,#60H
CALL INIT_LCD
CALL INIT_ISD
LOOP:
CALL KEY_SCAN
JNB F0,LOOP ; 无按键按下
MOV A,KEY_VALUE
CJNE A,#01H,NOT_REC
CALL RECORD_PROC
NOT_REC:
CJNE A,#02H,NOT_PLAY
CALL PLAY_PROC
NOT_PLAY:
CJNE A,#03H,NOT_STOP
CALL STOP_PROC
NOT_STOP:
SJMP LOOP
4.3 ISD4004驱动实现
ISD4004通过SPI接口控制,关键操作包括:
发送一个字节:
assembly复制SPI_SEND:
MOV R7,#8
SPI_LOOP:
RLC A
MOV SDA,C
SETB SCL
CLR SCL
DJNZ R7,SPI_LOOP
RET
录音控制:
assembly复制RECORD:
SETB CS
MOV A,#0B0H ; POWER UP
CALL SPI_SEND
CLR CS
MOV R6,#10
CALL DELAY_MS
SETB CS
MOV A,#0A0H ; RECORD
CALL SPI_SEND
CLR CS
RET
4.4 按键扫描与消抖
采用行列扫描方式检测按键:
assembly复制KEY_SCAN:
MOV P1,#0FH
MOV A,P1
ANL A,#0FH
CJNE A,#0FH,KEY_DOWN
CLR F0
RET
KEY_DOWN:
MOV R6,#20
CALL DELAY_MS
MOV A,P1
ANL A,#0FH
CJNE A,#0FH,KEY_CONFIRM
CLR F0
RET
KEY_CONFIRM:
SETB F0
MOV KEY_VALUE,A
RET
5. 系统调试与优化
5.1 硬件调试问题
问题1:语音芯片无响应
- 现象:发送控制命令后ISD4004无反应
- 排查:测量电源电压正常,检查SPI信号
- 原因:P0口未加上拉电阻,信号电平不足
- 解决:增加10kΩ排阻后工作正常
问题2:录音噪声大
- 现象:录音背景有明显嗡嗡声
- 排查:检查电源滤波和接地
- 原因:模拟地和数字地未分开
- 解决:采用星型接地,增加LC滤波
5.2 软件调试问题
问题1:LCD显示闪烁
- 现象:屏幕内容不稳定,频繁闪烁
- 排查:检查时序和延时程序
- 原因:显示刷新过快,且未清屏
- 解决:优化延时参数,增加清屏指令
问题2:按键反应迟钝
- 现象:需要长按才能识别
- 排查:检查消抖时间和扫描频率
- 原因:消抖时间过长(50ms)
- 解决:调整为20ms后响应灵敏
5.3 性能优化措施
- 增加录音电平自动调节功能
- 添加EEPROM存储配置参数
- 实现多段录音管理功能
- 优化电源管理,降低功耗
- 增加录音指示灯和蜂鸣提示
6. 项目总结与改进方向
经过一个多月的开发和调试,这个语音存储回放系统已经能够稳定工作。实测录音时长达到16分钟,音质清晰,背景噪声小。相比传统方案,这个设计确实展现出了明显的优势。
主要收获:
- 掌握了ISD4004语音芯片的应用
- 熟悉了SPI接口的底层驱动开发
- 积累了混合信号电路设计经验
- 提高了系统调试和问题排查能力
可以改进的地方:
- 改用STM32等更强大的主控,实现更多功能
- 增加SD卡存储,扩展录音容量
- 添加USB接口,方便文件传输
- 开发上位机软件,增强系统功能
- 设计PCB板,提高产品化程度
这个项目虽然不大,但涵盖了嵌入式开发的多个关键技术点。对于想学习单片机开发的朋友,我强烈建议从这种实际应用入手,既能学到知识,又能做出有用的东西。在开发过程中,最重要的就是保持耐心,遇到问题要系统性地分析和解决。