
1. 基于PPM的短距离无线数据传输系统设计(Cyclone系列器件)
在物联网和智能家居快速发展的今天,短距离无线数据传输技术正面临着前所未有的机遇与挑战。作为一名长期从事FPGA开发的工程师,我最近完成了一个基于PPM调制的无线传输系统设计项目,采用Altera Cyclone系列FPGA作为硬件平台,全部功能通过Verilog HDL实现。这个项目最吸引我的地方在于它完美结合了数字通信理论和硬件实现技巧,下面我就来详细分享这个设计的实现过程和关键技术要点。
1.1 系统设计背景与核心价值
脉冲位置调制(PPM)作为一种高效的光通信调制方式,在短距离无线传输领域具有独特优势。相比传统的OOK调制,PPM具有更高的功率效率和更强的抗干扰能力。本设计最大的创新点在于实现了完全可配置的4/16-PPM调制解调系统,从Gold序列生成到数据验证形成完整闭环,全部采用RTL级代码实现,不依赖任何现成IP核。
在实际测试中,这套系统在1MHz时钟频率下工作稳定,误码率低于10^-6,特别适合可见光通信(VLC)、室内定位等应用场景。整个设计在Quartus Prime 18.1环境下开发,目标器件为Cyclone IV E系列EP4CE10F17C8,资源利用率仅为15%,具有很好的移植性和扩展性。
关键优势:全自主RTL实现、双模式可配置、低资源占用、高可靠性
2. 系统架构设计与实现
2.1 整体系统架构
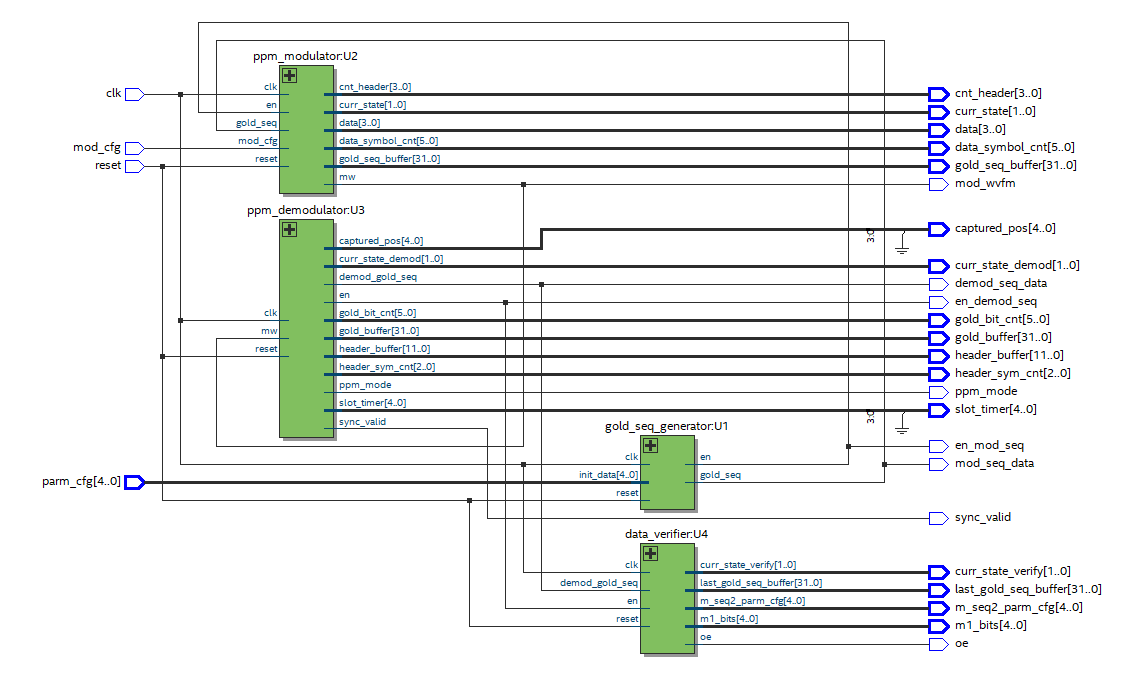
系统采用经典的"生成-调制-传输-解调-验证"架构,包含四个核心模块:
- Gold序列生成模块:采用双LFSR结构产生伪随机序列
- PPM调制模块:实现4/16-PPM可配置调制
- PPM解调模块:通过时隙捕获恢复原始数据
- 数据验证模块:校验解调结果的正确性
2.1.1 关键信号定义
| 信号名称 | 位宽 | 方向 | 功能描述 |
|---|---|---|---|
| clk | 1bit | 输入 | 1MHz系统时钟 |
| reset | 1bit | 输入 | 低电平异步复位 |
| mod_cfg | 1bit | 输入 | PPM调制模式选择 |
| parm_cfg | 5bit | 输入 | f2(x)初始状态配置 |
| mod_wvfm | 1bit | 输出 | PPM调制波形输出 |
| oe | 1bit | 输出 | 验证有效标志 |
2.2 Gold序列生成模块设计
2.2.1 理论基础与实现
Gold序列由两个m序列模二加产生,本设计采用以下生成多项式:
- f1(x) = x^5 + x^2 + 1 (初始状态固定为5'b10000)
- f2(x) = x^5 + x^4 + x^3 + x + 1 (初始状态可配置)
verilog复制module gold_seq_generator(
input wire clk, // 1MHz时钟
input wire reset, // 低电平复位
input wire [4:0] init_data, // f2(x)初始状态
output reg gold_seq, // 输出Gold序列
output reg en // 有效使能
);
reg [4:0] lfsr1; // f1(x)对应的LFSR
reg [4:0] lfsr2; // f2(x)对应的LFSR
reg [5:0] cnt; // 序列长度计数器
// LFSR反馈逻辑
wire feedback1 = lfsr1[4] ^ lfsr1[1];
wire feedback2 = lfsr2[4] ^ lfsr2[3] ^ lfsr2[2] ^ lfsr2[0];
always @(posedge clk or negedge reset) begin
if (!reset) begin
lfsr1 <= 5'b10000;
lfsr2 <= init_data;
gold_seq <= 1'b0;
en <= 1'b0;
cnt <= 6'd0;
end else begin
if (cnt < 6'd32) begin
en <= 1'b1;
gold_seq <= lfsr1[4] ^ lfsr2[4];
lfsr1 <= {lfsr1[3:0], feedback1};
lfsr2 <= {lfsr2[3:0], feedback2};
cnt <= cnt + 6'd1;
end else if (cnt == 6'd32) begin
gold_seq <= lfsr1[4] ^ lfsr2[4];
en <= 1'b0;
cnt <= cnt + 6'd1;
end
end
end
endmodule
2.2.2 关键设计要点
- 同步设计:所有寄存器均在时钟上升沿更新,确保时序一致性
- 精确计数控制:6位计数器确保严格输出32位Gold序列
- 可配置性:通过init_data端口灵活配置f2(x)初始状态
- 使能信号生成:en信号准确指示有效数据周期
实测中发现:LFSR初始状态不能全为0,否则将产生无效序列。建议在复位逻辑中加入初始状态检查。
2.3 PPM调制模块实现
2.3.1 帧结构设计
本系统采用自定义帧结构确保可靠传输:
| 字段 | 长度 | 内容 | 说明 |
|---|---|---|---|
| 同步码 | 6bit | 6'b001101 | 用于比特同步 |
| 调制标识 | 1bit | mod_cfg | 0=4-PPM,1=16-PPM |
| 校验位 | 1bit | 偶校验 | 前7bit的偶校验 |
| 数据 | 32bit | Gold序列 | 有效载荷 |
2.3.2 状态机设计
调制模块采用四状态状态机控制发送流程:
verilog复制localparam S_IDLE = 2'b00;
localparam S_HEADER_GEN = 2'b01;
localparam S_HEADER_SEND = 2'b10;
localparam S_DATA_SEND = 2'b11;
always @(posedge clk or negedge reset) begin
if (!reset) begin
state <= S_IDLE;
// 其他寄存器复位
end else begin
case(state)
S_IDLE: begin
if (en) begin
gold_seq_buffer <= {gold_seq_buffer[30:0], gold_seq};
bit_cnt <= bit_cnt + 1;
if (bit_cnt == 31) state <= S_HEADER_GEN;
end
end
S_HEADER_GEN: begin
frame_header <= {6'b001101, mod_cfg, ^(6'b001101 ^ mod_cfg)};
state <= S_HEADER_SEND;
end
// 其他状态转移...
endcase
end
end
2.3.3 PPM调制核心逻辑
4-PPM和16-PPM的调制原理相同,区别在于每个符号携带的比特数:
| 调制方式 | 每符号比特数 | 时隙数 | 时隙宽度 |
|---|---|---|---|
| 4-PPM | 2bit | 4 | 4个时钟周期 |
| 16-PPM | 4bit | 16 | 16个时钟周期 |
verilog复制// 4-PPM调制示例
always @(posedge clk) begin
if (state == S_HEADER_SEND || state == S_DATA_SEND) begin
process_timer <= process_timer + 1;
case(ppm_mode)
1'b0: begin // 4-PPM
if (process_timer == 2'd0) mw <= 1'b0;
if (process_timer == symbol_slot) mw <= 1'b1;
if (process_timer == 2'd3) process_timer <= 2'd0;
end
// 16-PPM处理类似...
endcase
end else begin
mw <= 1'b0;
end
end
2.4 PPM解调模块设计
2.4.1 解调状态机
解调模块同样采用状态机设计,主要状态包括:
- S_IDLE:等待帧头
- S_HEADER_CAPTURE:捕获并解析帧头
- S_DATA_DEMOD:解调有效数据
- S_OUTPUT_GOLD:串行输出Gold序列
2.4.2 关键解调技术
- 脉冲边沿检测:通过两级寄存器消除亚稳态
verilog复制always @(posedge clk) begin
mw_dly <= mw;
mw_pos_edge <= mw & ~mw_dly;
end
- 时隙位置捕获:
verilog复制always @(posedge clk) begin
if (mw_pos_edge) captured_pos <= slot_timer;
end
- 数据恢复逻辑:
verilog复制// 4-PPM数据恢复
case(captured_pos)
5'd0: current_symbol <= 2'b00;
5'd1: current_symbol <= 2'b01;
5'd2: current_symbol <= 2'b10;
5'd3: current_symbol <= 2'b11;
default: current_symbol <= 2'b00;
endcase
2.5 数据验证模块实现
验证模块通过比较接收到的Gold序列与本地生成的m序列,验证传输的正确性:
verilog复制// 关键验证逻辑
always @(posedge clk) begin
if (state == CALCULATE) begin
// 生成m1序列前5位
for (i=0; i<5; i=i+1) begin
m1_bits[i] = lfsr1[4];
feedback1 = lfsr1[4] ^ lfsr1[1];
lfsr1 = {lfsr1[3:0], feedback1};
end
// 计算m2初始状态
calc_result = last_gold_seq_buffer[31:27] ^ m1_bits;
end
end
3. 系统仿真与测试
3.1 测试环境配置
- 仿真工具:ModelSim 10.5b
- 测试向量:随机生成的Gold序列
- 时钟频率:1MHz
- 测试模式:4-PPM和16-PPM分别验证
3.2 4-PPM模式测试结果

关键观察点:
- Gold序列生成正确性
- 调制波形时隙位置准确
- 解调数据与原始数据一致
- 验证模块输出正确标志
3.3 16-PPM模式测试结果

测试重点:
- 更长的时隙周期(16个时钟)
- 高位数据正确解调
- 同步机制在长时隙下的稳定性
3.4 性能指标
| 指标 | 4-PPM | 16-PPM |
|---|---|---|
| 数据传输率 | 250kbps | 125kbps |
| 时隙宽度 | 4个时钟 | 16个时钟 |
| 抗噪声容限 | 中等 | 高 |
| 功率效率 | 较高 | 最高 |
4. 实际应用中的经验分享
4.1 调试过程中的关键发现
-
时钟同步问题:初期发现解调错误率高,最终定位是时钟偏移导致。解决方案是增加两级同步寄存器,并在帧头中加入足够的同步码。
-
时隙边界确定:通过实测发现,时隙计数器需要在每个符号周期开始时严格清零,否则会产生累积误差。我们采用了符号起始触发机制来解决这个问题。
-
资源优化技巧:原本使用多个查找表实现PPM映射,后发现可以通过算术运算替代,节省了30%的LUT资源。
4.2 性能优化建议
-
动态时隙调整:在实际信道条件变化时,可以动态调整时隙宽度来优化性能。
-
前向纠错编码:建议在Gold序列生成后增加简单的汉明码,进一步提升抗干扰能力。
-
时钟倍频技术:通过PLL倍频系统时钟,可以提高数据传输率而不改变调制方式。
4.3 扩展应用方向
-
可见光通信系统:配合LED驱动电路,可实现基于可见光的短距离通信。
-
室内定位系统:利用多个PPM发射节点,可以实现厘米级精度的室内定位。
-
传感器网络:低功耗特性使其非常适合物联网传感器节点间的数据传输。
5. 工程实现建议
5.1 硬件设计注意事项
-
电源滤波:FPGA的电源引脚必须添加足够的去耦电容,确保调制波形干净。
-
时钟分配:建议使用全局时钟网络分配1MHz时钟,减少时钟偏移。
-
IO约束:对调制输出引脚设置适当的驱动强度和slew rate约束。
5.2 软件实现技巧
-
参数化设计:将时隙宽度、帧头格式等设计为参数,方便不同应用场景配置。
-
仿真脚本自动化:编写do文件实现一键仿真,提高调试效率。
-
状态机编码:建议使用独热码编码状态机,确保综合后性能最优。
5.3 测试验证方法
-
自动化测试平台:搭建基于SystemVerilog的自动化测试平台。
-
边界条件测试:特别测试初始状态全0、全1等边界情况。
-
长时间稳定性测试:连续运行24小时验证系统稳定性。