
1. 后仿真中的X态传播问题解析
在后端设计验证环节,门级仿真(GLS)是确保芯片功能正确性的关键步骤。但实际工程中,工程师们经常会遇到一个令人头疼的现象——X态(不定态)的传播问题。X态就像电路中的"病毒",一旦出现就可能污染整个仿真环境。
X态的产生通常源于以下几种情况:
- 未初始化的寄存器输出
- 多驱动冲突(两个信号同时驱动同一个节点)
- 时序违例导致的亚稳态
- 黑盒模型或未建模的IP核接口
在常规设计中,X态传播往往只会影响局部功能,通过波形调试可以快速定位问题源头。但当X态遇到反馈环路时,情况就会变得异常复杂——X态会在环路中不断循环放大,最终导致整个仿真环境崩溃。
2. X态反馈环路的形成机制
2.1 典型环路结构分析
让我们解剖一个教科书级的X态环路案例:
verilog复制module x_loop (
input clk,
input rst_n,
output reg q
);
wire d;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) q <= 1'b0;
else q <= d;
end
assign d = ~q; // 关键反馈路径
endmodule
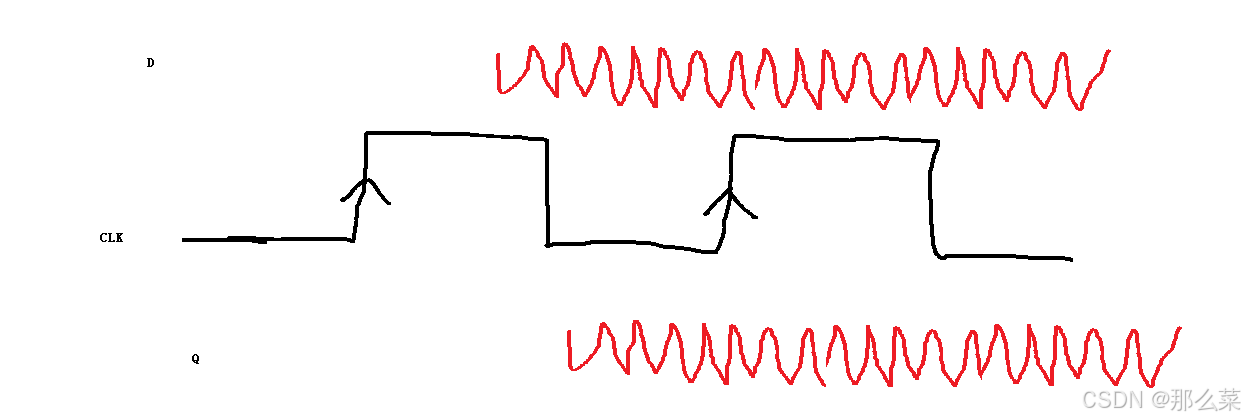
这个简单的D触发器反馈电路,当rst_n释放时:
- 如果初始时刻d为X态(可能由于复位释放时序问题)
- X态被采样到q输出端
- 经过反相器后d仍然保持X态
- 下一个时钟沿再次采样X态
- 形成死循环
2.2 时序违例的放大效应
当环路中存在时序违例时,问题会指数级恶化。以hold time违例为例:
| 时序参数 | 典型值 | 违例影响 |
|---|---|---|
| t_hold | 0.5ns | 当实际保持时间<0.5ns时 |
| t_setup | 1.2ns | 当建立时间不足时 |
在反馈环路中,如果DFF的hold time不满足:
- 第一个时钟周期:D端X态被错误采样
- 第二个时钟周期:亚稳态导致Q端输出振荡
- 后续周期:X态在环路中持续传播
3. 复杂组合逻辑中的X态传播
实际工程中的环路往往比教科书案例复杂得多。考虑下图所示结构:
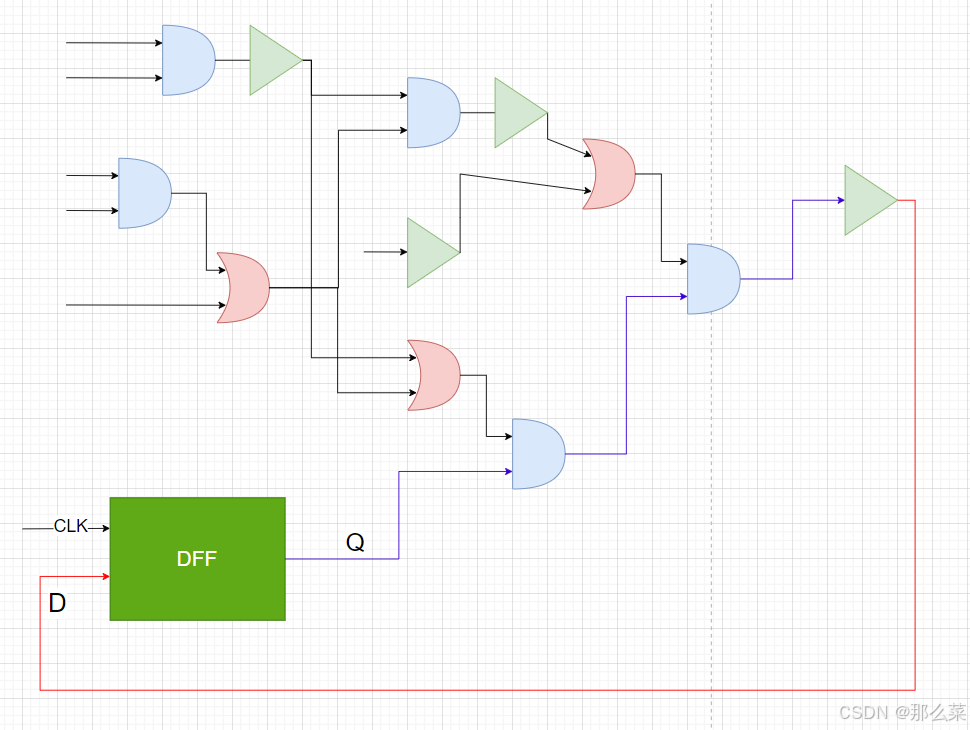
这个电路具有以下特点:
- 多级组合逻辑(两个与门+一个反相器)
- 环路延迟接近时钟周期
- 潜在的时序违例点
当X态出现在DFF输入端时:
- 经过与门时:X & 1 = X (X态保留)
- 经过反相器:~X = X (X态保留)
- 最终形成自持振荡环路
4. 仿真模型的特殊行为
商用仿真器对X态的处理各有特点。以常见的VCS仿真器为例:
bash复制vcs -debug_all -xprop=tmerge x_loop.v
仿真器对X态传播有两种处理模式:
- 悲观模式:任何包含X的操作结果都是X
- 乐观模式:尝试解析X态的实际值(如X & 0 = 0)
在环路场景下,即使使用乐观模式,X态仍可能持续存在:
5. 工程实践中的解决方案
5.1 设计阶段的预防措施
- 完整的复位初始化
verilog复制always @(posedge clk or negedge rst_n) begin
if (!rst_n) begin
q <= 1'b0; // 明确初始值
// 所有寄存器都需要初始化
end else begin
q <= d;
end
end
- 反馈环路插入同步器
verilog复制// 两级同步器防止亚稳态传播
reg q1, q2;
always @(posedge clk or negedge rst_n) begin
if (!rst_n) {q1, q2} <= 2'b00;
else {q1, q2} <= {d, q1};
end
5.2 验证阶段的调试技巧
- 使用X-propagation检查工具
tcl复制# VCS编译选项
set_verification_options -xprop X -xprop_verbose
- 关键信号追踪方法
verilog复制initial begin
$dumpfile("waves.vcd");
$dumpvars(0, x_loop); // 记录所有信号变化
#1000 $finish;
end
- 仿真控制参数优化
| 参数 | 推荐值 | 作用 |
|------|--------|------|
| +no_tchk_msg | 启用 | 关闭时序检查警告 |
| +xprop_mode | 2 | 平衡X态传播策略 |
6. 深度调试实战案例
6.1 案例背景
某SoC芯片在GLS阶段出现电源管理模块失效,仿真波形显示控制信号陷入X态死循环。
6.2 问题定位流程
- 使用VCS的X-propagation报告
bash复制vcs -xprop=merge -xprop_verbose pmu.v
- 关键信号追踪结果
code复制X-state propagation path:
pmu/ctrl_reg[3] (X) ->
pmu/and_gate ->
pmu/inverter ->
pmu/ctrl_reg[3]
- 根本原因分析
- 复位释放时序与时钟不同步
- 反馈路径组合延迟过长导致hold违例
6.3 解决方案实施
- 修改复位同步电路
verilog复制// 新增复位同步器
reg rst_sync1, rst_sync2;
always @(posedge clk or negedge rst_async_n) begin
if (!rst_async_n) {rst_sync1, rst_sync2} <= 2'b00;
else {rst_sync1, rst_sync2} <= {1'b1, rst_sync1};
end
- 优化时序约束
sdc复制set_max_delay -from [get_pins pmu/ctrl_reg/Q] \
-to [get_pins pmu/ctrl_reg/D] 1.5ns
7. 进阶防护策略
7.1 形式验证的应用
使用JasperGold进行X态传播验证:
tcl复制check_x_prop -module top -clock clk -reset rst_n
7.2 仿真断言监控
systemverilog复制assert property (@(posedge clk)
!$isunknown(pmu.ctrl_signal))
else $error("X-state detected!");
7.3 代码风格检查规则
- 所有寄存器必须显式初始化
- 反馈路径必须添加同步器
- 组合逻辑环路必须添加超时保护
8. 工具链协同工作流
推荐验证流程:
-
RTL阶段:
- 使用SpyGlass检查X态传播风险
tcl复制
set_rule_handling XPROP -enable -
综合后:
- 使用Formality进行等效性检查
tcl复制
set_verification_mode -xpropagation -
GLS阶段:
- VCS仿真带X-propagation分析
bash复制
vcs -xprop=merge -xprop_config xprop.cfg
9. 性能与精度的权衡
不同X态处理模式的对比:
| 模式 | 仿真速度 | 精度 | 适用场景 |
|---|---|---|---|
| 悲观模式 | 快 | 低 | 早期功能验证 |
| 乐观模式 | 慢 | 高 | 签核验证 |
| 混合模式 | 中 | 中 | 日常回归 |
工程建议:
- 项目初期使用乐观模式暴露问题
- 回归测试使用混合模式平衡效率
- 签核阶段必须使用悲观模式
10. 经验总结与避坑指南
我在多个芯片项目中总结的X态处理经验:
-
复位策略黄金法则:
- 异步复位必须同步释放
- 复位网络必须做时序分析
- 复位释放后至少等待3个时钟周期再操作寄存器
-
仿真环境配置要点:
makefile复制VCS_OPTS += -xprop=tmerge:verbose
VCS_OPTS += +no_tchk_msg +notimingchecks
-
调试技巧:
- 使用$display自动打印X态出现位置
verilog复制always @(posedge clk) begin if ($isunknown(sig)) begin $display("[%t] X-state at %m", $time); end end -
团队协作建议:
- 建立X态检查清单
- 在CI流程中加入X态检查
- 定期review复位和初始化代码
在实际项目中,我曾遇到一个特别隐蔽的X态环路问题:某时钟门控单元在低功耗模式下产生了X态,这个X态通过时钟树反馈回控制逻辑,导致整个电源管理系统失效。最终通过以下步骤解决:
- 在门控时钟输出端插入同步器
- 添加明确的低功耗模式退出序列
- 在验证环境中加入X态断言监控
这个案例给我的深刻教训是:任何可能产生X态的点都需要被视为潜在的风险源,特别是在有反馈路径的设计中。