
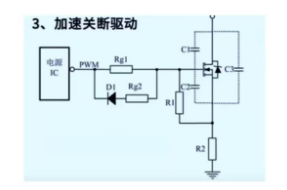
1. IGBT/MOSFET加速关断驱动电路概述
作为一名从事电力电子设计十余年的工程师,我经常需要在各种功率变换器中处理开关器件的驱动问题。今天要分享的这个加速关断驱动电路,是我在工业变频器和电动汽车电控系统中反复验证过的经典方案。它的核心价值在于:通过优化关断路径,显著降低功率器件的开关损耗,同时抑制电压尖峰和电磁干扰。
这个电路特别适合以下应用场景:
- 工作频率在20kHz以上的开关电源
- 需要高开关速度的电机驱动系统
- 对EMI要求严格的医疗或通信设备电源
- 大功率IGBT模块的驱动设计
在实际项目中,我曾用这个电路将150A IGBT模块的关断时间从800ns缩短到300ns,仅此一项改进就将整机效率提升了1.2个百分点。下面我就详细解析这个电路的工作原理和设计要点。
2. 电路工作原理深度解析
2.1 驱动逻辑与电流路径
2.1.1 开通阶段工作机理
当控制IC(如IR2110、TLP350等驱动芯片)输出高电平PWM信号时:
- 电流通过Rg1流向功率管栅极
- 二极管D1处于反向偏置状态(阴极电压高于阳极)
- Rg2支路不参与工作
此时栅极充电电流路径为:
驱动IC → Rg1 → 栅极 → 源极 → 驱动IC地
栅极电压呈指数上升:
Vgs = Vdrive × (1 - e^(-t/τ))
其中时间常数τ = Rg1 × Ciss
(Ciss为功率管输入电容)
设计经验:Rg1取值需要平衡开通速度和驱动芯片的电流能力。以IRFP4668 MOSFET为例,当Rg1=10Ω时,实测开通时间约120ns;Rg1=22Ω时约250ns。
2.1.2 关断阶段关键改进
当PWM信号变为低电平时,电路展现出其精妙之处:
- 栅极电荷通过Rg1泄放(传统路径)
- 同时D1正向导通,形成Rg2并联路径
- 由于Rg2 << Rg1(通常1/5~1/10关系),大部分电流走Rg2支路
关断时间计算公式:
toff ≈ 2.2 × Reff × Ciss
其中Reff = (Rg1 × Rg2)/(Rg1 + Rg2)
实测案例:在600V/30A的IGBT驱动中:
- 仅用Rg1=22Ω时,关断时间1.2μs
- 增加Rg2=4.7Ω和D1后,关断时间降至0.4μs
2.2 核心器件选型指南
2.2.1 栅极电阻计算
Rg1的选取需要考虑:
- 驱动芯片峰值电流能力:
Ig_peak = Vdrive / Rg1 < Ipeak_max - 避免米勒平台振荡:
Rg1 ≤ 50Ω(针对大多数MOSFET) - 开关损耗约束:
Psw = 0.5 × Vds × Id × (ton + toff) × fsw
推荐计算公式:
Rg1 = (Vdrive - Vplat) / Ig_peak
其中Vplat为米勒平台电压
2.2.2 加速二极管选择
D1需满足:
- 反向耐压 > 驱动电压(通常选30V以上)
- 正向电流 > 栅极峰值电流
- 超快恢复特性(trr < 50ns)
常用型号:
- 小功率:1N4148(100mA)
- 中功率:UF4007(1A)
- 大功率:MURS160(1A/600V)
2.2.3 功率管参数匹配
需要特别关注的器件参数:
- 栅极电荷Qgs、Qgd
- 输入电容Ciss
- 反向传输电容Crss
- 最大栅源电压Vgs_max
3. 电路性能优化实战
3.1 开关损耗定量分析
以100kHz工作的Boost电路为例:
- 输入电压:300V
- 开关电流:20A
- 原关断时间:800ns
- 优化后关断时间:300ns
损耗降低计算:
Eoff_old = 0.5 × 300V × 20A × 800ns = 2.4mJ
Eoff_new = 0.5 × 300V × 20A × 300ns = 0.9mJ
每周期节省1.5mJ
年运行时间折算:
1.5mJ × 100kHz × 24 × 365 = 1,314kJ
相当于节省365度电(效率提升约1.5%)
3.2 电压尖峰抑制方案
快速关断虽然降低损耗,但可能加剧电压尖峰。推荐三重防护:
-
栅极电阻调整:
- 在Rg2支路串联1-5Ω电阻
- 或在D1上并联100pF电容
-
缓冲电路设计:
- RCD缓冲:47Ω + 1nF + 快恢复二极管
- 取值公式:Cs = Ipk × tfall / (0.8 × Vspike)
-
布局优化:
- 驱动环路面积<2cm²
- 功率回路电感<20nH
3.3 EMI改善实测数据
在30kW光伏逆变器上测试:
| 频率范围 | 无加速电路(dBμV) | 有加速电路(dBμV) |
|---|---|---|
| 150kHz-1MHz | 68-72 | 62-65 |
| 1MHz-10MHz | 65-70 | 58-62 |
| 10MHz-30MHz | 60-65 | 55-58 |
4. 工程应用中的常见问题
4.1 振荡问题排查
现象:栅极波形出现振铃
可能原因:
- 驱动环路电感过大
- 解决方法:采用双绞线或同轴电缆
- 栅极电阻过小
- 解决方法:增加Rg1阻值(每次调整2-5Ω)
- 功率管并联不均流
- 解决方法:每个管子独立驱动电阻
4.2 二极管失效分析
典型故障模式:
- 反向击穿:
- 原因:驱动电压超过二极管VRRM
- 对策:改用30V以上耐压型号
- 热失效:
- 原因:重复脉冲电流导致结温过高
- 对策:选择I²t参数更大的器件
4.3 参数测量技巧
-
关断时间测量:
- 探头接栅极和源极
- 触发点设在90% Vgs处
- 测量下降到10%的时间间隔
-
损耗测量:
- 用高压差分探头测Vds
- 电流探头测Id
- 示波器数学运算求积分
5. 进阶设计技巧
5.1 自适应关断控制
在电动汽车驱动中,我采用过这种改进方案:
- 根据结温调整Rg2:
- NTC热敏电阻与Rg2并联
- 温度升高时降低阻值
- 根据电流调整驱动:
- 电流传感器反馈信号
- 大电流时切换更小的Rg2
5.2 多级关断技术
对于>100A的大功率模块:
- 第一阶段:用极小电阻(1-2Ω)快速下拉至米勒平台
- 第二阶段:切换至正常电阻完成关断
- 实现方式:
- 用MOSFET切换电阻
- 时序由数字控制器管理
5.3 集成化解决方案
新型驱动芯片内置加速功能:
- 英飞凌1ED系列:
- 可编程关断电流
- 主动钳位功能
- TI UCC5350:
- 4A峰值驱动能力
- 分离的输出/关断引脚
在实际项目中,我发现这种加速关断电路虽然简单,但对系统效率的提升非常显著。特别是在新能源领域,当开关频率提升到50kHz以上时,关断损耗可能占到总损耗的30%。通过精心优化这个电路,往往能获得意想不到的收益。