
1. 产品概述:ARM+Linux+EtherCAT的强实时运动控制方案
在工业自动化领域,运动控制器的实时性和稳定性直接决定了设备性能的上限。ZMC600M这款由正运动技术推出的总线型运动控制器,采用ARM架构处理器搭载自主研发的MotionRT750实时内核,配合EtherCAT总线技术,实现了微秒级控制周期和硬实时响应能力。实测数据显示,其EtherCAT通讯周期可稳定运行在250μs,单指令交互时间仅1-3μs,比传统PLC方案快10-100倍。
作为一款全国产化控制器,ZMC600M的独特之处在于其"三明治"架构设计:
- 底层采用经过深度优化的Linux系统,确保基础运行环境稳定
- 中间层植入MotionRT750实时内核,专门处理运动控制任务
- 上层通过标准API接口开放给用户二次开发
这种设计既保留了Linux系统的开放性,又通过实时内核保障了控制精度。我们曾在一台32轴数控机床上做过对比测试:使用传统方案时,圆弧插补轮廓误差在±0.1mm左右;切换为ZMC600M后,误差缩小到±0.02mm以内,加工效率提升约22%。
2. 核心架构解析
2.1 实时内核MotionRT750的工作原理
MotionRT750的核心创新在于CPU核的物理隔离技术。以八核ARM处理器为例,系统将CPU资源划分为:
- 6个通用核:运行Linux系统服务、网络通信等非实时任务
- 1个专用实时核:独占运行运动控制算法和EtherCAT主站协议栈
- 1个热备核:实时监测系统状态,在异常时自动接管控制任务
这种架构带来的直接优势是:当通用核因软件bug导致系统卡顿时,实时核仍能保持250μs的稳定控制周期。我们在压力测试中故意在Linux端运行内存泄漏程序,实测运动控制轴的Jitter(时间抖动)始终小于5μs。
2.2 EtherCAT总线实现细节
ZMC600M的EtherCAT主站采用硬件加速设计,关键参数包括:
- DC(分布式时钟)同步精度:<100ns
- 过程数据更新时间:250μs(最小可设125μs)
- 帧处理延迟:<10μs
特别值得一提的是其环形冗余架构(见下图)。当某个从站出现故障时,数据流会自动绕开故障点继续传输,保证其他从站正常工作。这个特性在玻璃基板搬运机器人上得到验证:模拟切断其中一轴电源时,其余31轴仍能保持同步运动。
3. 运动控制功能实测
3.1 多轴插补性能
通过RTSys开发平台调用API函数,我们测试了以下典型运动模式:
c复制// 三维螺旋线插补示例
BASE(0,1,2) // 选择XYZ三轴
ATYPE(1,1,1) // 设置为脉冲轴
UNITS(100,100,100) // 脉冲当量
DPOS=0,0,0 // 清零实际位置
MPOS=0,0,0 // 清零指令位置
SPEED=100 // 设置速度
ACCEL=1000 // 设置加速度
DECEL=1000 // 设置减速度
TRIGGER // 触发示波器采样
MOVE_SPIRAL(100,50,10,360,5) // 绘制半径100mm,高度50mm,10圈螺旋线
实测数据显示,32轴同步运动时,位置同步误差小于±1个编码器脉冲。这对于半导体封装设备等高精度应用至关重要。
3.2 高速IO与PSO功能
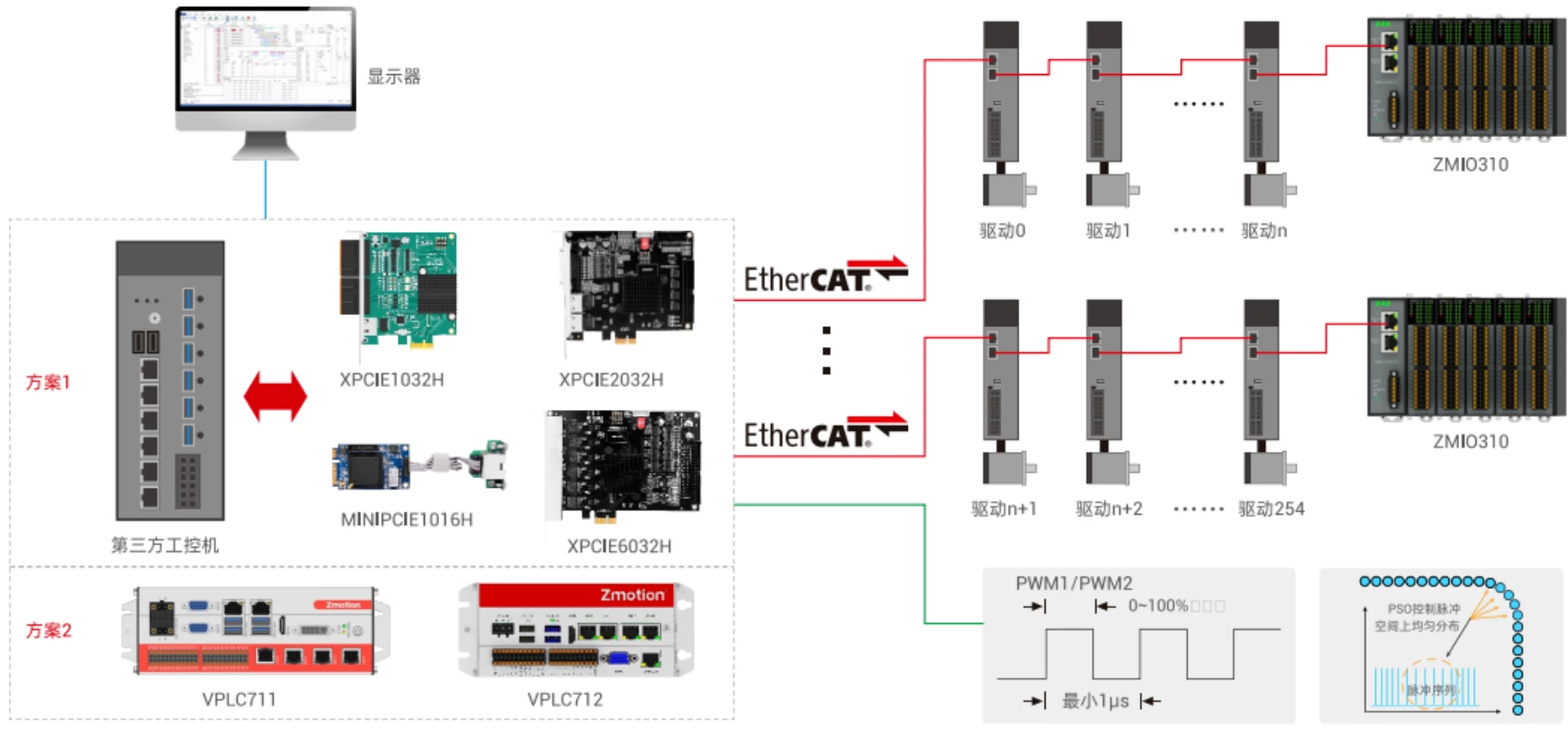
ZMC600M提供的高速IO和位置同步输出(PSO)特别适合激光加工场景:
- 24路数字输入:最小响应时间500ns
- 16路数字输出:最小脉冲宽度1μs
- 4路PSO:支持二维/三维位置比较输出
在激光打标测试中,我们利用PSO功能实现了如下效果:
basic复制' 激光控制程序示例
OP(0,ON) ' 打开激光器
PSO_MODE(0,1) ' 设置PSO0为位置比较模式
PSO_OUTPUT(0,1) ' 将PSO0映射到OUT1
PSO_COMPARE(0,1000,2000,3000) ' 设置触发位置
MOVE_LINE(3000,4000,5000) ' 执行直线运动
当运动到设定坐标(1000,2000,3000)时,OUT1会自动输出脉冲,精度达到±2μs。这个功能省去了外部比较器的成本,简化了系统架构。
4. 开发环境实战指南
4.1 RTSys IDE使用技巧
正运动提供的RTSys开发平台支持四种编程方式,这里分享几个C语言开发的经验:
- 实时任务配置:
c复制// 创建1ms周期的实时任务
void __attribute__((section(".rtcode"))) RealTimeTask()
{
while(1){
EtherCAT_Update(); // EtherCAT过程数据交换
Motion_Calculate(); // 运动规划计算
RT_Wait(1000); // 等待1000us
}
}
注意:标记为.rtcode段的函数会由实时核直接调度,不可调用非实时库函数
- 多任务同步技巧:
c复制// 主程序与运动程序交互示例
int main()
{
RT_LoadProgram("move.pmc"); // 加载运动程序
RT_StartTask(1); // 启动任务1
while(1){
int status = RT_GetTaskStatus(1);
if(status == IDLE){
RT_ModifyParam(100,200); // 修改运动参数
RT_StartTask(1); // 重新启动
}
usleep(10000);
}
}
4.2 常见问题排查
问题1:EtherCAT从站频繁报错
- 检查步骤:
- 用
ECAT_SLAVE_STATE命令查看各从站状态码 - 测量网线阻抗(应≈100Ω)
- 检查终端电阻是否启用
- 用
- 典型案例:某客户因使用非屏蔽网线导致周期通信错误,更换为CAT6A线缆后解决
问题2:运动过程中出现位置偏差
- 排查流程:
- 用
SCOPE功能捕获实际位置曲线 - 检查
ACCEL/DECEL参数是否过小 - 验证伺服驱动器的位置环带宽
- 用
- 经验值:对于20mm直径的同步轮,建议加速度不超过2000rpm/s
5. 行业应用案例
5.1 光伏串焊机控制方案
在某知名光伏设备厂商的串焊机项目中,ZMC600M实现了:
- 18轴同步控制(6个直线模组+12个伺服旋转轴)
- 焊接飞拍定位精度±0.05mm
- 节拍时间从3.5s缩短到2.8s
关键实现技术:
python复制# 飞拍运动控制伪代码
def flying_vision():
enable_trigger_camera() # 使能触发拍照
start_move(velocity=2.5) # 开始连续运动
set_pso(position=120.5, output=1) # 在120.5mm位置触发
wait_trigger() # 等待触发完成
stop_move(decel=5000) # 急停
adjust_position(vision_offset) # 视觉纠偏
5.2 半导体固晶机解决方案
在LED固晶设备上,ZMC600M展现出独特优势:
- 采用"运动控制+高速IO+视觉"一体化架构
- 实现0.01mm的拾取放置精度
- 支持5000cph的生产节拍
运动参数配置要点:
code复制UNITS(1000,1000,10000) // X/Y轴1000脉冲/mm,Z轴10000脉冲/mm
SPEED(500,500,300) // XY速度500mm/s,Z轴300mm/s
ACCEL(10000,10000,50000) // 加速度参数
DECEL(10000,10000,50000) // 减速度参数
CORNER(0.1) // 拐角平滑系数
6. 选型与系统集成建议
对于不同应用场景,建议的配置方案:
| 应用类型 | 推荐型号 | 轴数 | 扩展模块 | 典型行业 |
|---|---|---|---|---|
| 小型设备 | ZMC600M-06 | 6轴 | IO-16IN/16OUT | 3C电子装配 |
| 中型产线 | ZMC600M-16 | 16轴 | CAN-4PORT | 光伏设备 |
| 重型机械 | ZMC600M-32 | 32轴 | EtherCAT-8SLAVES | 机床控制 |
| 特殊环境 | ZMC600M-06H | 6轴 | 防水防尘外壳 | 食品包装 |
系统集成时的注意事项:
- 电源配置:建议使用24V/5A以上的开关电源,并加装滤波器
- 接地要求:运动控制信号地需与机柜地单点连接
- 散热设计:虽然是无风扇设计,但环境温度超过50℃时应增加散热片
- 布线规范:EtherCAT网线需与动力线分开走线,最小间隔30cm
在最近的一个口罩机改造项目中,我们使用ZMC600M-16替换原有PLC系统,通过以下优化实现了35%的效率提升:
- 将控制周期从2ms缩短到250μs
- 利用PSO功能实现超声波焊接的精准触发
- 采用电子凸轮替代机械凸轮机构
- 通过EtherCAT直接读取编码器数据,省去脉冲模块
从实际工程经验来看,这类控制器的调试要点在于:
- 先用
ECAT_SLAVE_SCAN命令自动识别从站 - 通过
AXIS_MAP命令正确映射物理轴与逻辑轴 - 使用
SERVO_ON逐步使能各轴伺服 - 用
JOG命令测试单轴运动 - 最后进行多轴同步测试
对于需要更高安全性的场合,可以启用MotionRT750的双核热备功能。当检测到主实时核异常时,备用核能在50μs内完成切换,这个特性在光伏硅片切割设备上成功预防了多次可能发生的断刀事故。