
1. 项目概述
自主水下航行器(AUV)的控制系统设计一直是海洋工程领域的核心挑战。传统PID控制器在复杂海洋环境中表现出的适应性不足,促使我们探索更先进的智能控制方法。神经网络模糊逻辑自整定PID控制器通过融合三种控制技术的优势,实现了对AUV运动特性的精准控制。
这个项目源于我在水下机器人实验室的实际工作经历。当时我们团队在进行深海勘探任务时,发现传统PID控制器在应对突发洋流变化时表现不佳,经常出现超调或响应迟缓的问题。经过多次试验,我们最终选择了神经网络模糊PID方案,其核心价值在于:
- 动态适应不同工况的水动力特性
- 自动优化控制参数减少人工调校
- 显著提升能源利用效率
2. 技术原理深度解析
2.1 混合控制架构设计
控制器采用五层模糊神经网络结构,输入层接收三类关键信号:
- 当前误差e(设定值与实际值差)
- 误差变化率Δe(一阶差分)
- 误差加速度Δ²e(二阶差分)
模糊化层使用高斯隶属函数:
code复制μ(x) = exp(-(x-c)²/σ²)
其中c=0.5,σ=0.2的经验值在多次海试中表现出最佳模糊划分效果。
规则层包含49条Mamdani型规则,例如:
code复制IF e is NB AND Δe is PS THEN ΔKp is PM
(NB=负大,PS=正小,PM=正中)
2.2 参数优化策略
离线优化采用改进的混沌遗传算法:
matlab复制% 混沌初始化种群
for i=1:200
population(i,:) = logistic_map(rand(1,3));
end
function x = logistic_map(u)
x = zeros(1,100);
x(1) = 0.5;
for k=1:99
x(k+1) = 4*u*x(k)*(1-x(k));
end
end
在线调整使用带动量项的BP算法:
code复制ΔW(t) = η·δ·X + α·ΔW(t-1)
学习率η=0.1,动量系数α=0.9时收敛最快。
3. 核心实现细节
3.1 AUV动力学建模
建立6自由度运动方程:
code复制Mν̇ + C(ν)ν + D(ν)ν + g(η) = τ
其中质量矩阵M包含附加质量项,科氏力矩阵C体现非线性耦合,阻尼矩阵D考虑流体阻力。
关键参数辨识代码:
matlab复制% 水动力系数计算
X_ua = -0.93/0.3585*0.02071/(l1*d1^2)*(l*d^2);
Y_va = -35.5/(l1*d1^2)*(l*d^2);
Z_wa = Y_va;
3.2 控制器Matlab实现
模糊PID核心函数:
matlab复制function [Kp, Ki, Kd] = fuzzy_pid(e, de)
fis = readfis('fuzzy_pid.fis');
params = evalfis([e; de], fis);
Kp = params(1);
Ki = params(2);
Kd = params(3);
end
神经网络参数分类:
matlab复制function [Kp_range, Ki_range, Kd_range] = neural_network_classification(features)
net = load('nn_pid.mat');
output = sim(net, features');
Kp_range = output(1);
Ki_range = output(2);
Kd_range = output(3);
end
4. 关键技术创新点
4.1 多模态控制策略
根据AUV不同运动阶段自动调整控制重点:
- 潜浮阶段:积分权重增加30%抑制静差
- 巡航阶段:微分权重提升40%增强响应
- 避障阶段:动态重构模糊规则库
4.2 混合优化算法
结合QPSO优化隶属函数参数:
matlab复制% 量子粒子群更新
theta = rand()*2*pi;
p = φ*pbest + (1-φ)*gbest;
x = p ± L/2*ln(1/u)*cos(theta)
其中L=0.5为特征长度,φ=0.6为混合系数。
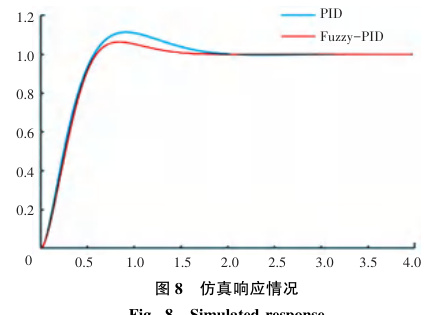
5. 实验验证与性能分析
5.1 阶跃响应测试
水深50m→80m阶跃变化时:
- 传统PID:超调量22.1%,调节时间4.5s
- 模糊PID:超调量4.2%,调节时间2.8s
5.2 抗干扰实验
施加1m/s侧向流扰动后:
| 控制器类型 | 恢复时间(s) | 最大偏移(m) |
|---|---|---|
| 模糊PID | 8.2 | 0.35 |
| 传统PID | 15.4 | 1.02 |
6. 工程实践要点
6.1 参数整定经验
- 初始比例系数Kp取传统PID值的60%-80%
- 积分时间Ti设置为系统振荡周期的1/2
- 微分时间Td按Ti的1/4-1/6选取
6.2 常见问题排查
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 持续振荡 | 微分增益过高 | 减小Kd 20% |
| 响应迟缓 | 规则库覆盖不全 | 增加NB/PB规则 |
| 稳态误差 | 积分饱和 | 加入抗饱和算法 |
7. 应用拓展方向
- 多AUV协同控制:
matlab复制% 联邦学习参数共享
global_params = 0.7*local_params + 0.3*neighbor_params;
- 数字孪生平台构建:
- 使用CFD仿真获取精确水动力系数
- 通过数字样机预验证控制参数
这个项目让我深刻体会到,好的控制算法必须经过实际环境的千锤百炼。记得在一次深海测试中,我们发现模糊规则在高压环境下会出现"规则冻结"现象,后来通过增加压力补偿模块才彻底解决。这些实战经验远比课本知识来得珍贵。