
1. 项目概述
作为一名FPGA验证工程师,我经常需要处理各种仿真工具的使用问题。今天我想分享一些关于ModelSim在FPGA验证中的实用技巧,特别是针对AMD(原Xilinx)器件的后仿真流程、ModelSim核心文件格式解析以及UVM验证环境的搭建经验。这些内容都是我在实际项目中积累的实战经验,希望能帮助到正在学习FPGA验证的同行们。
2. ModelSim对AMD器件的后仿真
2.1 Vivado与ModelSim的协同工作模式
在AMD FPGA开发流程中,Vivado和ModelSim的配合使用主要有两种方式:
第一种是独立流程:Vivado生成后仿真所需的网表和时序文件后,完全退出Vivado环境,在ModelSim中独立完成后续仿真工作。这种方式灵活度高,不受版本限制,是我个人推荐的工作方式。
第二种是联合流程:直接在Vivado中调用ModelSim进行仿真。这种方式虽然操作简便,但存在明显的版本兼容性问题。例如,Vivado 2022.1只能调用ModelSim 10.7及以上版本,这在团队协作环境中经常造成困扰。
重要提示:在实际项目中,强烈建议团队统一工具版本,避免因版本差异导致的仿真失败问题。
2.2 独立流程的详细操作步骤
2.2.1 Vivado端准备工作
-
工程创建与设置:在Vivado中创建工程时,务必正确设置器件型号和仿真语言(Verilog/VHDL)。我习惯在"Project Settings > Simulation"中预先指定好仿真工具为ModelSim。
-
综合与实现:执行综合(Synthesis)和实现(Implementation)步骤时,需要特别注意以下选项:
- 在"Implementation > Route Design"设置中勾选"Generate Multiple Hierarchical Netlist Files"
- 在"Implementation > Write Bitstream"设置中启用"Write Timing Simulation Post-Place and Route Netlist"
-
生成仿真文件:实现完成后,通过菜单"Flow > Run Post-Implementation Timing Simulation"生成后仿真所需的文件。关键输出文件包括:
design_time_impl.v:后仿真网表文件design_time_impl.sdf:标准延迟格式文件glbl.v:全局仿真控制文件
2.2.2 ModelSim端操作流程
-
库文件准备:这是最容易出错的环节。新版本Vivado的库文件结构较为复杂,必须按顺序编译以下库:
bash复制vlib unisims_ver vlib unimacro_ver vlib simprims_ver vcom -work unisims_ver ${VIVADO_INSTALL_DIR}/data/verilog/src/unisims/*.v vlog -work simprims_ver ${VIVADO_INSTALL_DIR}/data/verilog/src/simprims/*.v -
工程文件添加:将Vivado生成的网表文件、SDF文件和测试平台文件添加到ModelSim工程中。特别注意:
glbl.v必须包含在工程中- 网表文件中的
sdf_annotate路径需要检查修正
-
仿真执行:在ModelSim命令行中执行:
bash复制
vsim -L unisims_ver -L simprims_ver testbench glbl
2.3 常见问题排查
-
SDF文件加载失败:检查网表文件中
sdf_annotate语句的路径是否正确,建议使用相对路径。 -
库文件缺失错误:确认所有必需的库文件都已正确编译,并且在vsim命令中通过-L参数指定。
-
时序违例分析:后仿真中出现的时序违例通常反映了实际硬件中的潜在问题,需要结合Vivado的时序报告进行分析。
3. ModelSim的文件和脚本
3.1 SDF文件深度解析
标准延迟格式(SDF)文件是后仿真的核心,它包含了门级网表中各单元的精确时序信息。在实际项目中,正确处理SDF文件至关重要。
3.1.1 SDF文件加载方式
-
命令行方式:在启动仿真时通过vsim命令加载
bash复制
vsim -sdftyp /tb/dut=design.sdf testbench这种方式适合在脚本化流程中使用。
-
Verilog系统任务方式:在测试平台中直接调用
verilog复制initial begin $sdf_annotate("design.sdf", dut); end这种方式更灵活,可以在不同测试用例中加载不同的SDF文件。
3.1.2 SDF文件优化技巧
-
SDF文件编译:使用ModelSim的sdfcom工具可以显著提高加载速度:
bash复制
sdfcom -typdelays design.sdf design_compiled.sdf -
增量SDF标注:对于大型设计,可以只标注关键路径的时序信息,减少仿真开销:
verilog复制$sdf_annotate("critical_paths.sdf", dut, , , "MAXIMUM");
3.2 VCD文件实战应用
值变转储(VCD)文件是仿真波形的重要载体,在调试和验证中有多种用途。
3.2.1 VCD文件生成方法
-
ModelSim命令方式:
bash复制
vsim -voptargs=+acc testbench vcd file waveform.vcd vcd add /testbench/dut/* run -all -
Verilog系统任务方式:
verilog复制initial begin $dumpfile("waveform.vcd"); $dumpvars(0, testbench.dut); end
3.2.2 VCD文件的高级应用
-
激励回放:将一次仿真生成的VCD文件作为另一次仿真的输入:
bash复制
vsim -vcdstim waveform.vcd dut -
功耗分析:配合EDA工具将VCD文件转换为功耗分析所需的格式。
3.3 TCL/DO脚本编程技巧
ModelSim的自动化离不开TCL/DO脚本,掌握这些脚本技巧可以极大提高工作效率。
3.3.1 基本脚本结构
一个典型的ModelSim DO文件包含三个部分:
tcl复制# 第一部分:库和编译设置
vlib work
vmap work work
vlog -sv design.sv testbench.sv
# 第二部分:仿真启动和波形配置
vsim -novopt work.testbench
add wave -position insertpoint sim:/testbench/*
# 第三部分:激励施加和运行控制
force -freeze /testbench/clk 0 0, 1 {10ns} -r 20ns
force /testbench/reset 1 0
run 100ns
force /testbench/reset 0 0
run 1us
3.3.2 高级脚本技巧
-
参数化脚本:通过变量使脚本更灵活
tcl复制set TESTCASE "basic_test" vlog -sv testcases/${TESTCASE}.sv -
批处理模式:实现无人值守的回归测试
bash复制vsim -c -do "run_regression.do" -logfile regression.log -
错误处理:增强脚本的健壮性
tcl复制if {[catch {vsim testbench} err]} { echo "Error: $err" exit 1 }
4. UVM验证环境构建
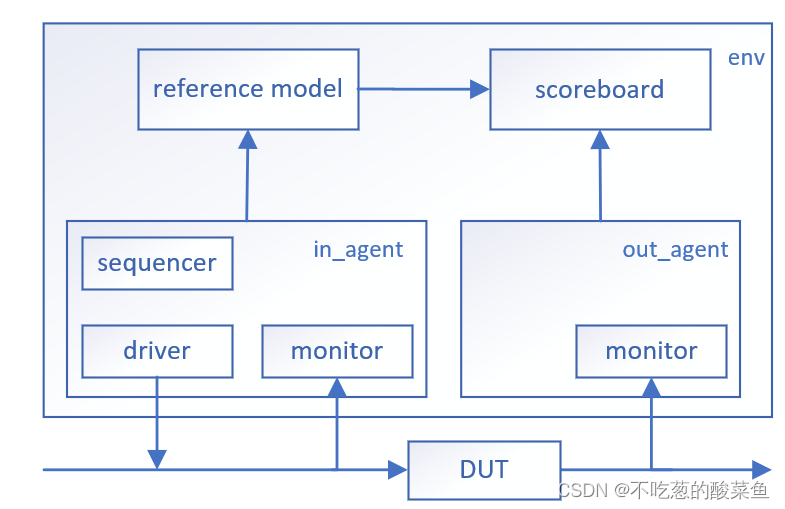
4.1 UVM基础架构解析
UVM验证方法学为FPGA验证提供了标准化框架,其核心架构如下图所示:
4.1.1 核心组件功能
-
Transaction:验证环境中的数据传输单元,封装了地址、数据、控制信号等信息。
-
Sequence:生成有意义的transaction序列,模拟真实场景下的数据流。
-
Sequencer:协调多个sequence的执行顺序,实现激励的灵活控制。
-
Driver:将transaction转换为具体的时序信号,驱动DUT接口。
-
Monitor:监测DUT接口信号,重建transaction用于功能检查。
-
Scoreboard:实现自动检查,比较Monitor采集的数据与预期值。
4.1.2 典型UVM测试平台代码结构
systemverilog复制`include "uvm_macros.svh"
module top;
import uvm_pkg::*;
// 接口定义
dut_if dut_if1();
// DUT实例化
dut dut1(.if1(dut_if1));
initial begin
// 将接口存入config_db
uvm_config_db#(virtual dut_if)::set(null, "*", "dut_if", dut_if1);
// 启动测试
run_test("base_test");
end
endmodule
4.2 UVM验证环境搭建实战
4.2.1 环境搭建步骤
-
基础环境类定义:
systemverilog复制class env extends uvm_env; `uvm_component_utils(env) agent m_agent; scoreboard m_scb; function new(string name, uvm_component parent); super.new(name, parent); endfunction virtual function void build_phase(uvm_phase phase); m_agent = agent::type_id::create("m_agent", this); m_scb = scoreboard::type_id::create("m_scb", this); endfunction endclass -
测试用例编写:
systemverilog复制class base_test extends uvm_test; `uvm_component_utils(base_test) env m_env; function new(string name, uvm_component parent); super.new(name, parent); endfunction virtual function void build_phase(uvm_phase phase); m_env = env::type_id::create("m_env", this); endfunction task run_phase(uvm_phase phase); phase.raise_objection(this); #1000; phase.drop_objection(this); endtask endclass
4.2.2 UVM与ModelSim的集成
-
编译选项设置:在ModelSim中编译UVM库和验证环境
bash复制vlib uvm_lib vlog -sv +incdir+$UVM_HOME/src $UVM_HOME/src/uvm_pkg.sv vlog -sv +incdir+./sv ./sv/top.sv -
仿真启动命令:指定UVM测试用例名称
bash复制
vsim -sv_lib uvm_dpi top +UVM_TESTNAME=base_test
4.3 UVM验证进阶技巧
4.3.1 寄存器模型应用
UVM提供了强大的寄存器抽象层(RAL),可以简化寄存器验证:
systemverilog复制class reg_model extends uvm_reg_block;
`uvm_object_utils(reg_model)
rand uvm_reg_field data;
rand uvm_reg_field control;
function new(string name = "reg_model");
super.new(name, UVM_NO_COVERAGE);
endfunction
virtual function void build();
// 寄存器构建代码
endfunction
endclass
4.3.2 虚拟序列控制
通过虚拟序列实现复杂场景验证:
systemverilog复制class virt_seq extends uvm_sequence;
`uvm_object_utils(virt_seq)
task body();
seq1 seq1_h = seq1::type_id::create("seq1_h");
seq2 seq2_h = seq2::type_id::create("seq2_h");
fork
seq1_h.start(p_sequencer.seqr1);
seq2_h.start(p_sequencer.seqr2);
join
endtask
endclass
4.3.3 覆盖率驱动验证
利用UVM覆盖率机制实现验证闭环:
systemverilog复制class cov_collector extends uvm_subscriber #(transaction);
`uvm_component_utils(cov_collector)
covergroup cg;
option.per_instance = 1;
addr_cp: coverpoint tr.addr {
bins low = {[0:127]};
bins mid = {[128:255]};
bins high = {[256:511]};
}
endgroup
function new(string name, uvm_component parent);
super.new(name, parent);
cg = new();
endfunction
function void write(transaction t);
tr = t;
cg.sample();
endfunction
endclass
5. 验证环境调试技巧
5.1 ModelSim调试命令集锦
-
波形调试:
bash复制
add wave -position insertpoint sim:/testbench/* configure wave -timelineunits ns -
断点设置:
bash复制when {/testbench/dut/counter == 8'hFF} { echo "Counter reached FF" stop } -
信号强制:
bash复制
force -freeze /testbench/reset 1 0 run 100ns force -freeze /testbench/reset 0 0
5.2 UVM调试技巧
-
消息控制:通过+UVM_VERBOSITY控制调试信息详细程度
bash复制
vsim +UVM_VERBOSITY=UVM_DEBUG top -
相位调试:跟踪UVM各phase执行情况
systemverilog复制function void phase_started(uvm_phase phase); `uvm_info("PHASE", $sformatf("Phase %s started", phase.get_name()), UVM_MEDIUM) endfunction -
事务追踪:记录transaction流转过程
systemverilog复制virtual function void write(transaction t); `uvm_info("TRACE", $sformatf("Received transaction: %s", t.convert2string()), UVM_HIGH) endfunction
6. 性能优化实践
6.1 仿真加速技巧
-
增量编译:只重新编译修改过的文件
bash复制
vlog -incr design.v -
优化选项:合理使用vsim优化参数
bash复制
vsim -voptargs=+acc work.testbench -
信号选择:只记录必要的信号波形
bash复制
add wave -position insertpoint sim:/testbench/dut/signal_of_interest
6.2 大型设计验证策略
-
层次化验证:自底向上逐步集成验证环境
-
模块化测试:针对不同功能模块开发独立测试套件
-
回归测试:建立自动化回归测试框架
bash复制#!/bin/bash for test in `ls tests/*.sv`; do echo "Running test $test" vsim -c -do "run_test.do $test" done
7. 项目经验分享
在实际项目中,我总结了以下几点关键经验:
-
版本控制至关重要:工具链版本、IP核版本、脚本版本必须严格保持一致。我曾经因为团队成员使用不同版本的ModelSim导致仿真结果不一致,浪费了大量调试时间。
-
自动化脚本是生产力:投入时间开发完善的自动化脚本,长期来看会显著提高工作效率。我的标准验证环境包含以下脚本:
- 环境配置脚本(setup_env.sh)
- 编译脚本(compile.do)
- 仿真脚本(simulate.do)
- 回归测试脚本(run_regression.sh)
-
文档与注释不可忽视:清晰的文档和充分的代码注释可以极大降低团队协作成本。我习惯为每个验证组件编写以下文档:
- 接口说明
- 功能描述
- 使用示例
- 已知问题
-
持续集成实践:将验证环境集成到CI/CD流程中,可以及早发现问题。我的典型CI配置包括:
- 每日夜间构建
- 代码提交触发快速回归
- 覆盖率趋势分析
-
性能监控与分析:定期分析仿真性能瓶颈,优化验证环境。我常用的优化手段包括:
- 减少不必要的波形记录
- 优化transaction生成策略
- 合理使用UVM的factory override机制
最后,我想强调的是,FPGA验证是一个需要不断学习和实践的领域。随着器件规模的增长和设计复杂度的提高,验证方法和技术也在不断发展。保持开放的学习态度,积极参与技术社区,与同行交流经验,这些都是提升验证能力的有效途径。