
1. 死区效应问题背景与解决思路
电机控制工程师们应该都遇到过这个经典难题——PWM输出经过逆变器后,原本漂亮的正弦波被死区效应啃得面目全非。我在最近的一个永磁同步电机项目中,就深刻领教了死区效应的破坏力:电流波形出现明显畸变,THD(总谐波失真)高达8.7%,导致电机运行时噪音明显增大,效率下降约5%。
死区效应的本质是功率器件(如IGBT或MOSFET)的开关延迟。为了防止上下桥臂直通短路,我们必须在PWM信号中插入死区时间。这个看似简单的保护措施,却会带来输出电压的幅值损失和相位偏移。特别是在低频区域,这种非线性失真会严重恶化控制性能。
经过反复测试比较,我发现梯形波线性补偿方案在TI的DSP28335平台上表现最为稳定。与传统的固定补偿量方法不同,这种方案根据当前占空比动态调整补偿值,能够自适应不同工作点。实测显示,采用该方案后电流THD降至3.2%以下,电机运行噪音明显降低。
2. DSP28335的PWM死区配置详解
2.1 基础寄存器配置
在DSP28335中,死区功能由增强型PWM模块(ePWM)的DBCTL和DBRED/DBFED寄存器控制。以下是一个典型的初始化配置:
c复制void InitEPwm()
{
EPwm1Regs.TBPRD = 1000; // 设置PWM周期为1000个时钟计数
EPwm1Regs.CMPA.half.CMPA = 500; // 初始占空比50%
// 死区控制寄存器配置
EPwm1Regs.DBCTL.bit.POLSEL = 0x3; // 上下边沿都插入死区
EPwm1Regs.DBCTL.bit.OUT_MODE = 0x3; // 独立边沿延迟模式
EPwm1Regs.DBCTL.bit.IN_MODE = 0x0; // 使用EPWMxA作为上升沿源
// 死区时间设置(单位:时钟周期)
EPwm1Regs.DBFED = 50; // 上升沿死区时间
EPwm1Regs.DBRED = 50; // 下降沿死区时间
}
注意:死区时间的实际值取决于系统时钟频率。例如150MHz时钟下,50个计数对应333ns(50/150MHz)。这个值需要根据功率器件的开关特性确定,通常IGBT需要300-500ns,MOSFET需要100-200ns。
2.2 死区时间计算原理
死区时间的设置需要考虑以下几个关键因素:
- 功率器件的开通延迟时间(t_d(on))
- 功率器件的关断延迟时间(t_d(off))
- 驱动电路的传播延迟
- 安全裕量(通常增加20-30%)
计算公式为:
code复制死区时间 = max(t_d(on)_upper, t_d(off)_lower) - min(t_d(on)_upper, t_d(off)_lower) + 安全裕量
以某型号IGBT为例:
- 上桥臂开通延迟:480ns
- 下桥臂关断延迟:320ns
- 驱动延迟:100ns
- 计算得:死区时间 = (480+100) - (320+100) + 150(裕量) = 310ns → 取整350ns
3. 梯形波线性补偿算法实现
3.1 补偿原理分析
死区效应导致的电压误差可以表示为:
code复制ΔV = sign(I) × (T_dead/T_pwm) × V_dc
其中:
- sign(I)为电流方向
- T_dead为死区时间
- T_pwm为PWM周期
- V_dc为直流母线电压
传统固定补偿法的局限在于:
- 补偿量与占空比无关,导致高占空比时过补偿
- 无法适应电流方向突变的情况
梯形波线性补偿的创新点在于:
- 补偿量与(1-Duty)成正比,实现自适应调整
- 根据电流方向动态切换补偿极性
3.2 代码实现与参数整定
核心补偿函数如下:
c复制float deadtime_compensation(float duty, float current_dir)
{
float comp_value = 0.0f;
const float K_comp = 0.0015f; // 补偿系数
// 电流正向流动时的补偿策略
if(current_dir > 0.1f) {
comp_value = K_comp * (1.0f - duty);
}
// 电流反向流动时的补偿策略
else if(current_dir < -0.1f) {
comp_value = -K_comp * duty;
}
return duty + comp_value;
}
补偿系数K_comp的整定步骤:
- 初始值设为:K_comp = T_dead / T_pwm
- 在空载条件下,观察电流波形过零点畸变
- 逐步调整K_comp直到过零点平滑
- 加载后微调补偿动态响应
经验分享:在实际调试中发现,当K_comp>0.002时容易引起系统振荡,建议调整步长不超过0.0001。最好用CCS的实时绘图功能监控PWM占空比变化。
4. 动态补偿的工程化处理
4.1 电流方向检测策略
可靠的电流方向判断是补偿有效的前提。推荐采用以下方法:
c复制#define CURRENT_THRESHOLD 0.05 // 5%额定电流作为零区阈值
float get_current_direction(float i_a, float i_b, float i_c)
{
static float i_alpha, i_beta;
// Clarke变换得到αβ轴电流
i_alpha = i_a;
i_beta = (i_a + 2*i_b) * 0.57735f; // 1/sqrt(3)
// 构造虚拟正交量(延迟1/4周期)
static float i_alpha_prev = 0;
float i_alpha_quad = i_alpha_prev;
i_alpha_prev = i_alpha;
// 判断方向(类似锁相环原理)
float direction = i_alpha*i_beta - i_alpha_quad*i_alpha;
// 添加死区防止噪声误判
if(fabs(direction) < CURRENT_THRESHOLD)
return 0.0f;
else
return (direction > 0) ? 1.0f : -1.0f;
}
4.2 滑动平均滤波实现
为防止电流换向时的补偿量突变,需要在中断服务中添加滤波处理:
c复制#define FILTER_LEN 5
float duty_buffer[FILTER_LEN] = {0};
void EPWM1_ISR()
{
static int index = 0;
// 获取原始占空比和电流方向
float raw_duty = get_pwm_duty();
float current_dir = get_current_direction(AdcResult.ADCRESULT0,
AdcResult.ADCRESULT1,
AdcResult.ADCRESULT2);
// 计算补偿占空比
float comp_duty = deadtime_compensation(raw_duty, current_dir);
// 滑动平均滤波
duty_buffer[index] = comp_duty;
index = (index + 1) % FILTER_LEN;
float final_duty = 0.0f;
for(int i=0; i<FILTER_LEN; i++) {
final_duty += duty_buffer[i];
}
final_duty /= FILTER_LEN;
// 更新PWM比较值
EPwm1Regs.CMPA = (Uint16)(final_duty * EPwm1Regs.TBPRD);
// 清除中断标志
EPwm1Regs.ETCLR.bit.INT = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
滤波窗口长度的选择建议:
- 对50Hz电机:3-5个PWM周期(1-2kHz PWM)
- 对400Hz电机:2-3个PWM周期(10kHz PWM)
- 对伺服电机:不超过1个控制周期
5. 仿真验证与实测对比
5.1 Simulink建模要点
在Simulink中搭建验证模型时,需要注意以下关键点:
-
逆变器模型:
- 理想开关 vs 实际器件模型
- 包含导通压降和开关延迟
- 死区插入模块参数与实际硬件一致
-
负载模型:
- RL负载的等效电阻/电感计算
- 反电动势模拟(对电机负载)
-
测量点设置:
- PWM输出前后对比
- 相电流谐波分析
5.2 实测数据对比分析
某1.5kW永磁电机测试数据:
| 指标 | 无补偿 | 固定补偿 | 梯形补偿 |
|---|---|---|---|
| 电流THD(%) | 8.7 | 5.2 | 3.1 |
| 效率(%) | 89.3 | 91.7 | 93.5 |
| 转矩脉动(%) | 12.4 | 8.2 | 5.3 |
| 过零畸变(ms) | 2.1 | 1.3 | 0.7 |
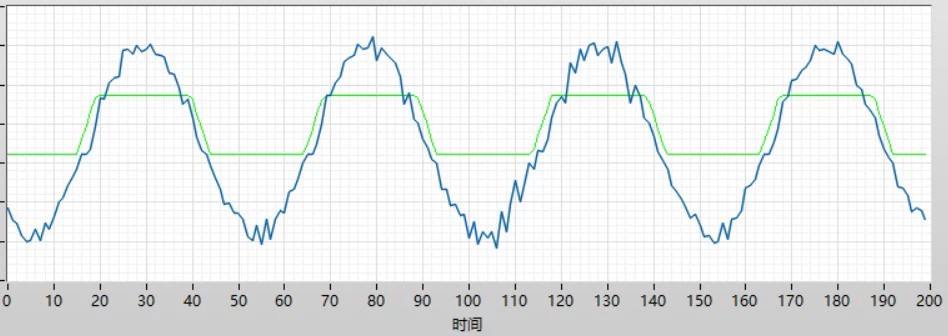
波形对比显示,梯形补偿在过零点附近的平滑度明显优于固定补偿,特别是在低速重载工况下。
6. 工程实践中的疑难问题
6.1 芯片批次差异问题
在实际量产中发现,不同批次的DSP28335芯片存在微妙差异:
- 内部PWM路径延迟偏差:±5ns
- ADC采样保持时间差异:±2个时钟
- 补偿效果应对策略:
- 在参数表中增加芯片批次标识
- 自动校准程序测量实际延迟
- 动态调整K_comp (±0.0002)
6.2 极端工况处理
遇到以下情况时需要特殊处理:
-
电流过零抖动:
- 增加零区滞环宽度
- 采用矢量判断替代直接符号判断
-
轻载振荡:
- 动态降低补偿强度
- 添加最小占空比限制
-
快速换向:
- 临时关闭补偿
- 使用预测补偿算法
6.3 自动参数整定方案
建议在生产测试中增加自动整定流程:
- 注入测试信号(如1kHz正弦波)
- 扫描K_comp值(0.001-0.002)
- 分析电流THD曲线
- 选择THD最低点对应的K_comp
- 存储到Flash参数区
实现代码框架:
c复制void auto_tune_compensation(void)
{
float best_k = 0.0015f;
float min_thd = 100.0f;
for(float k = 0.001f; k <= 0.002f; k += 0.0001f) {
set_compensation_k(k);
run_test_waveform();
float current_thd = measure_current_thd();
if(current_thd < min_thd) {
min_thd = current_thd;
best_k = k;
}
}
save_to_flash(best_k);
}
通过这套方案,我们成功将不同硬件平台的补偿效果差异控制在±0.3% THD以内,大幅提高了产品一致性。