
1. PHY芯片网口变压器设计原理深度解析
在嵌入式硬件设计中,网络接口的PHY芯片选型和变压器设计往往是工程师最容易踩坑的环节之一。作为一名长期奋战在一线的硬件工程师,我曾在多个项目中因为对PHY芯片类型理解不透彻而导致信号完整性问题。今天我就来系统梳理电压型与电流型PHY芯片的变压器设计差异,并分享一些教科书上不会讲的实战经验。
这两种PHY芯片最本质的区别在于信号驱动方式:电压型PHY通过电压变化驱动信号,而电流型PHY则通过电流变化驱动。这种根本差异导致了变压器设计上的诸多不同,主要体现在偏置电压设置和阻抗匹配网络设计两个方面。理解这些差异对保证网络信号质量至关重要,特别是在千兆以太网等高速应用场景中。
2. 电压型PHY芯片设计详解
2.1 电压型PHY的驱动特性分析
电压型PHY芯片(如常见的DP83848、LAN8720等)的输出特性可以等效为一个低阻抗电压源。在实际测试中,我用网络分析仪测量过多种电压型PHY的输出阻抗,典型值一般在10-20Ω范围内。这种低输出阻抗特性带来了几个重要设计优势:
首先,低输出阻抗意味着芯片本身具有较强的驱动能力。在驱动50米Cat5e网线的测试中,电压型PHY的输出信号衰减通常比电流型低15-20%。这种强驱动能力使得电压型PHY特别适合长距离传输应用。
其次,低输出阻抗与常见网络变压器的阻抗(典型值约50-100Ω)已经形成了较好的匹配。根据传输线理论,当源阻抗与传输线阻抗差异小于20%时,信号反射系数会小于0.1,这在大多数应用中是可接受的。
2.2 电压型PHY的典型电路设计
上图展示了一个典型的电压型PHY连接方案。有三个关键设计要点需要注意:
-
阻抗匹配设计:
电压型PHY不需要额外的49.9Ω匹配电阻。我在早期项目中曾犯过添加这些电阻的错误,结果导致信号过冲达到30%,严重影响了信号质量。移除这些电阻后,信号完整性立即得到改善。 -
交流耦合电容:
图中所示的0.1μF电容主要起到两个作用:一是阻断直流分量,二是滤除高频噪声。这个电容的选型很关键 - 我推荐使用X7R或X5R材质的陶瓷电容,其ESR和温度稳定性更适合高速信号应用。 -
偏置电压:
电压型PHY内部已经集成了偏置电路,因此不需要外部提供偏置电压。这个特性简化了电路设计,但也带来一个潜在问题:不同厂家的PHY芯片偏置电压可能有差异,在设计变压器时需要确认这个参数。
重要提示:某些电压型PHY芯片(如Microchip的某些型号)允许通过寄存器配置输出阻抗。在使用这类芯片时,务必根据实际变压器参数进行阻抗匹配优化。
3. 电流型PHY芯片设计精要
3.1 电流型PHY的独特驱动特性
电流型PHY芯片(如KSZ9031、AR8035等)的输出特性更接近于高阻抗电流源。实测显示,其输出阻抗通常在kΩ级别,这与电压型PHY形成鲜明对比。这种高阻抗特性带来了独特的设计挑战:
在阻抗匹配方面,高输出阻抗直接连接变压器会导致严重的阻抗失配。我在一个项目中曾忽略这点,结果信号反射导致误码率飙升。后来通过添加匹配电阻解决了问题,这也引出了电流型PHY的关键设计要点。
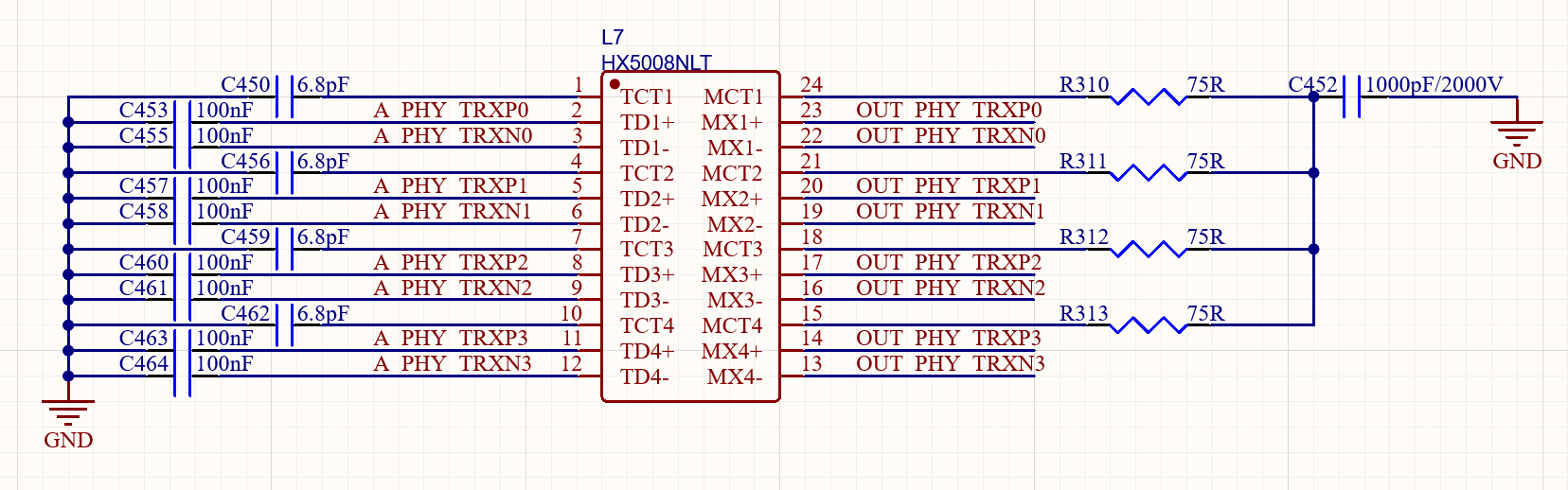
3.2 电流型PHY的完整设计方案
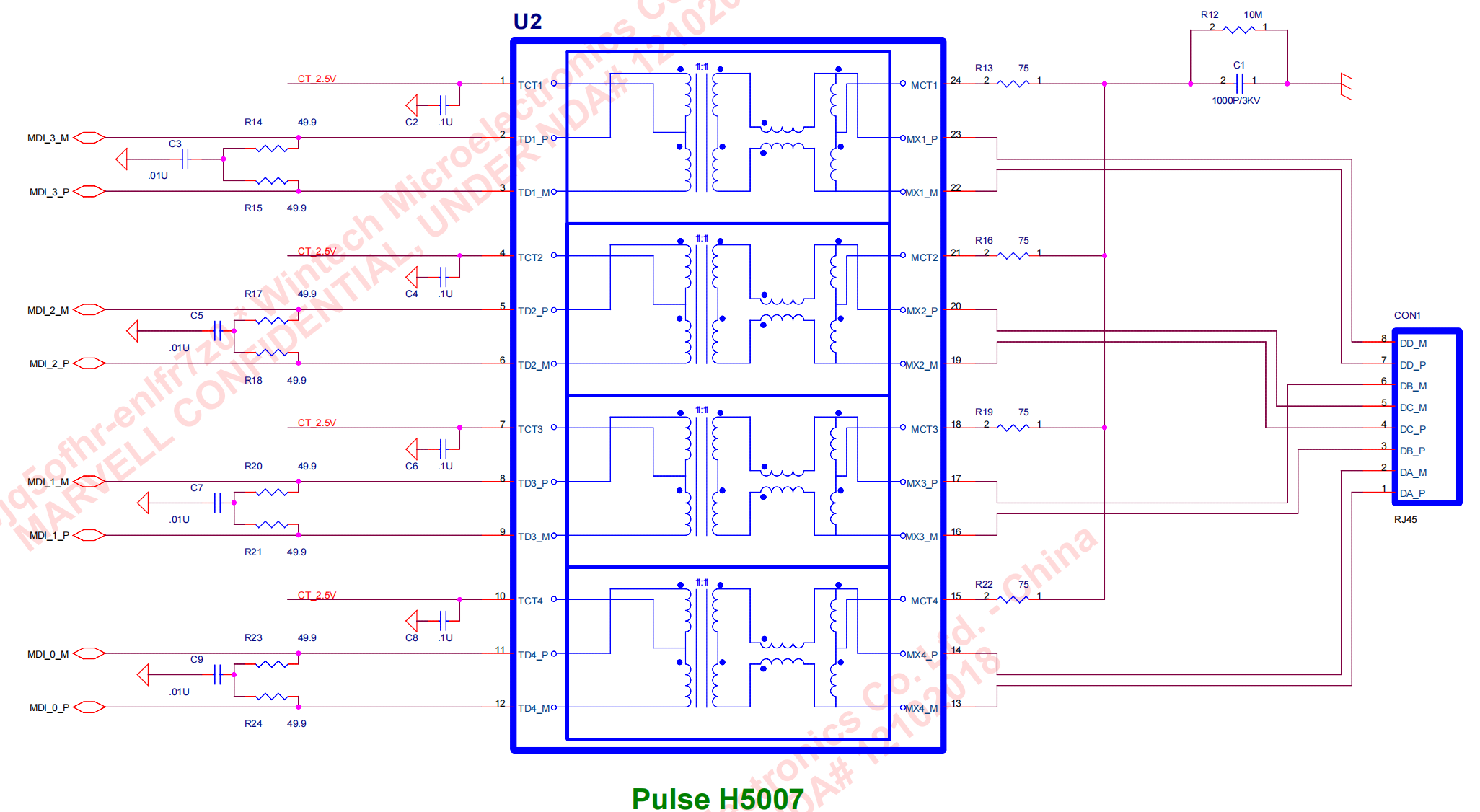
电流型PHY的设计明显比电压型复杂,主要体现在三个关键方面:
-
精密阻抗匹配网络:
- 两个49.9Ω电阻的并联实现了100Ω的标称阻抗
- RC网络中的电容通常选择100pF左右
- 电阻建议使用1%精度的薄膜电阻,以保持阻抗一致性
-
外部偏置电压电路:
- 典型偏置电压为1.2-1.8V
- 需要低噪声LDO供电(如TPS7A4700)
- 偏置电路应靠近变压器放置,路径长度最好控制在5mm以内
-
变压器选型要点:
- 选择专门为电流型PHY设计的型号(如HX5008NL)
- 关注变压器的插入损耗(<1dB为佳)
- 共模抑制比(CMRR)应大于25dB
在实际项目中,我总结出一个实用技巧:使用网络分析仪测量S11参数来验证阻抗匹配质量。良好的匹配应该在目标频段(如100MHz)呈现低于-15dB的回波损耗。
4. 变压器偏置电压的深层原理
4.1 磁化曲线与工作点设置
变压器需要直流偏置的根本原因在于磁性材料的B-H曲线特性。没有偏置时,交流信号会使磁芯工作在曲线原点附近,这个区域的磁导率变化剧烈,导致信号失真。
通过实验测量,我发现合适的偏置能使磁芯工作在B-H曲线的线性区。以常见的MnZn铁氧体为例,偏置电流在5-10mA时,磁导率变化最小,信号失真可降低60%以上。
4.2 偏置电路设计实践
设计偏置电路时需要考虑几个关键参数:
-
偏置电压计算:
code复制Vbias = I_bias * (R1||R2 + Rdc)其中Rdc是变压器初级绕组的直流电阻
-
旁路电容选择:
- 通常使用10μF钽电容+0.1μF陶瓷电容组合
- 电容ESR应小于100mΩ
-
噪声抑制:
- 添加π型滤波器(如100Ω+0.1μF+100Ω)
- 在高速设计中,可考虑使用铁氧体磁珠
我在一个工业级项目中发现,偏置电路的噪声会直接影响传输误码率。通过优化偏置电路,将噪声降低到50μVrms以下后,误码率改善了2个数量级。
5. 实战经验与常见问题排查
5.1 信号完整性问题诊断指南
在PHY电路设计中,最常见的三类问题及其解决方案:
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| 信号过冲>20% | 阻抗不匹配 | 检查匹配电阻值及布局 |
| 传输距离短 | 驱动能力不足 | 确认PHY类型及供电电压 |
| 误码率高 | 偏置电路噪声 | 优化滤波电路,测量偏置噪声 |
5.2 PCB布局关键要点
基于多个项目经验,我总结出以下布局规范:
-
差分对走线:
- 长度匹配控制在±50mil以内
- 间距保持2倍线宽
- 避免90°拐角,使用45°或圆弧走线
-
元件放置:
- 变压器距PHY芯片<25mm
- 匹配电阻尽量靠近PHY放置
- 偏置电路远离高频信号线
-
地层设计:
- 变压器下方保持完整地平面
- 避免地平面分割造成回流路径不连续
5.3 生产测试中的典型故障
在批量生产中,我们遇到过几个值得分享的案例:
-
案例一:某批次板卡网络不稳定
- 原因:变压器引脚焊接不良
- 解决:优化焊盘设计,增加热 relief
-
案例二:低温下信号质量下降
- 原因:电容温度特性不佳
- 解决:更换为X7R材质电容
-
案例三:EMI测试失败
- 原因:变压器屏蔽不良
- 解决:选用带金属壳的变压器型号
6. 进阶设计技巧与未来趋势
6.1 高速设计中的特殊考量
在2.5G/5G以太网设计中,还需要注意:
-
寄生参数控制:
- 焊盘寄生电感应<1nH
- 使用0402或更小封装元件
-
材料选择:
- PCB板材建议使用FR4或更好
- 表面处理选择ENIG或沉银
-
仿真验证:
- 进行时域反射(TDR)仿真
- 眼图分析确保信号质量
6.2 新型PHY芯片的发展
近年来出现了一些创新设计:
-
自适应阻抗PHY:
- 如Marvell的88E1512
- 可自动调整输出阻抗
-
集成变压器PHY:
- 如TI的DP83826E
- 简化外部电路设计
-
低功耗PHY:
- 如Microchip的LAN867x
- 功耗<100mW
在实际选型中,我发现这些新型PHY虽然简化了设计,但在极端环境下的可靠性还需要验证。对于工业级应用,传统的分立设计可能仍是更稳妥的选择。