
1. 项目概述:STM32数字声音传感器实战
声音检测在智能家居、安防监控和工业自动化等领域应用广泛。这次我选用STM32F103C8T6(俗称"蓝莓派")搭配KY-037数字声音传感器,实现了一个基础但实用的声音检测系统。这个组合特别适合刚接触嵌入式开发的硬件爱好者——STM32开发板价格亲民(约15元),而KY-037传感器更是只要3-5元就能到手。
这个项目的核心价值在于:
- 理解数字传感器与MCU的交互原理
- 掌握STM32标准外设库的GPIO操作
- 实践传感器数据与显示设备的联动
- 构建完整的嵌入式开发调试流程
硬件选型提示:KY-037虽然只能检测声音有无(不能测分贝值),但其内置的LM393比较器能输出干净的方波信号,特别适合作为入门级项目的首选传感器。
2. 传感器工作原理深度解析
2.1 硬件架构剖析
KY-037的核心是驻极体话筒和LM393双电压比较器。驻极体话筒本质上是个电容器,当声波振动膜片时,电容值变化产生微弱的交流信号(约mV级)。这个信号经过LM393与预设阈值比较后,输出干净的数字信号。
传感器板载的蓝色电位器(标号"VR1")是关键所在——顺时针旋转会降低灵敏度(需要更大声音才能触发),逆时针则提高灵敏度。实测调节范围约30-120dB,可通过以下方法校准:
- 接上示波器观察DO引脚
- 在安静环境下缓慢旋转电位器
- 当输出刚好从低电平跳变到高电平时停止
2.2 电路原理详解
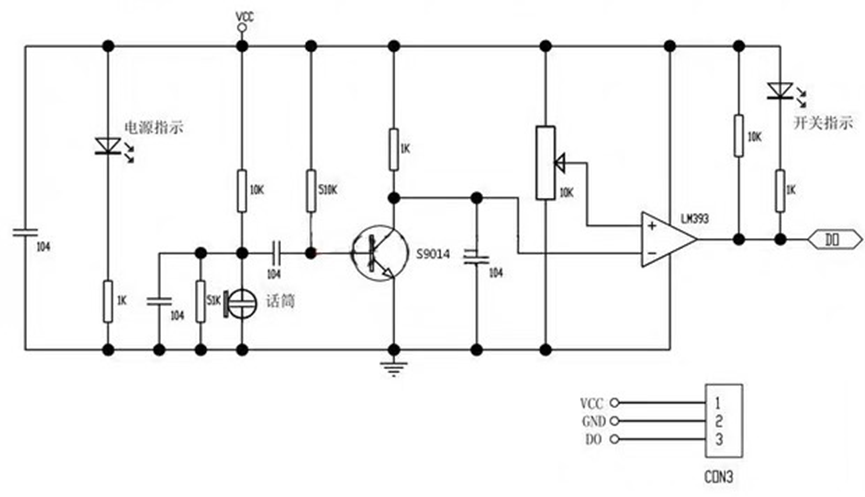
原理图中三个关键部分:
- 信号采集:驻极体话筒MIC通过R2(10kΩ)上拉,将声波转换为电信号
- 信号调理:C1(104电容)滤除高频干扰,VR1调节比较阈值
- 信号输出:LM393比较器将模拟信号转换为数字电平,LED1作为状态指示灯
常见误区:很多初学者以为DO输出的是模拟量,实际上它只有0/1两种状态。如果需要测量声音强度,应该选择KY-038这类带AO输出的模块。
3. STM32驱动开发全流程
3.1 硬件连接方案
根据项目需求,我们采用以下接线方式:
| 传感器引脚 | STM32接口 | 备注 |
|---|---|---|
| VCC | 3.3V | 也可接5V,但需注意电平匹配 |
| GND | GND | 共地至关重要 |
| DO | PA0 | 必须配置为上拉输入 |
OLED显示模块接线:
- SCL → PB6 (I2C1时钟线)
- SDA → PB7 (I2C1数据线)
避坑指南:如果发现传感器响应异常,首先检查PA0是否配置为上拉输入模式。浮空输入会导致电平不稳定,产生误触发。
3.2 软件架构设计
整个工程包含三个关键文件:
main.c- 系统主循环和业务逻辑sound.c- 传感器驱动实现sound.h- 接口定义和配置
核心代码解析(sound.c)
c复制void SOUND_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(SOUND_GPIO_CLK, ENABLE);
GPIO_InitStructure.GPIO_Pin = SOUND_GPIO_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 上拉输入模式
GPIO_Init(SOUND_GPIO_PORT, &GPIO_InitStructure);
}
uint16_t Sound_GetData(void)
{
return !GPIO_ReadInputDataBit(SOUND_GPIO_PORT, SOUND_GPIO_PIN);
}
代码设计要点:
- 使用标准外设库而非HAL库,保持更好的可移植性
- 上拉输入模式确保无信号时保持高电平
- 取反操作将物理电平转换为逻辑状态(1=有声音)
主程序逻辑(main.c)
c复制while (1) {
LED_Toggle(); // 心跳灯指示系统运行
delay_ms(500);
if(Sound_GetData() == 1) {
OLED_ShowChinese(96,16,0,16,1); // 显示"有"
printf("检测到声音 | 数据:%d\r\n", Sound_GetData());
} else {
OLED_ShowChinese(96,16,1,16,1); // 显示"无"
printf("静音状态 | 数据:%d\r\n", Sound_GetData());
}
delay_ms(200);
}
4. 调试技巧与性能优化
4.1 常见问题排查
问题1:传感器始终输出高电平
- 检查电位器是否旋到最敏感位置
- 用万用表测量DO对地电压,敲击传感器时应看到电压跳变
- 确认STM32引脚模式为GPIO_Mode_IPU
问题2:OLED显示乱码
- 检查I2C地址是否匹配(通常0x78或0x7A)
- 确认初始化时序正确,特别是延时长度
- 排查电源干扰,建议在VCC与GND间加104电容
4.2 抗干扰设计
工业环境中可采取以下措施:
- 在传感器VCC与GND间并联100μF电解电容
- 信号线使用双绞线或屏蔽线
- 软件端添加去抖算法:
c复制#define SAMPLE_TIMES 5
uint16_t Sound_GetData_Filter(void) {
uint16_t count = 0;
for(int i=0; i<SAMPLE_TIMES; i++) {
count += !GPIO_ReadInputDataBit(SOUND_GPIO_PORT, SOUND_GPIO_PIN);
delay_ms(10);
}
return (count > SAMPLE_TIMES/2) ? 1 : 0;
}
5. 项目扩展与进阶应用
5.1 多传感器联动
结合光敏电阻实现智能声光控制:
c复制if(Sound_GetData() && (Light_GetData() < LIGHT_THRESHOLD)) {
LED_On(); // 光线暗且有声音时开灯
delay_ms(5000); // 延时5秒后自动关闭
LED_Off();
}
5.2 无线传输方案
通过ESP8266将数据上传至云平台:
- 配置WiFi模块为STA模式
- 使用AT指令连接MQTT服务器
- 定时上报传感器状态:
c复制char buffer[50];
sprintf(buffer, "{\"sound\":%d}", Sound_GetData());
ESP8266_Send("AT+CIPSEND=0,%d\r\n", strlen(buffer));
ESP8266_Send(buffer);
5.3 功耗优化技巧
对于电池供电场景:
- 启用STM32的低功耗模式
- 间隔唤醒采样(如每500ms唤醒一次)
- 动态调节传感器供电:
c复制void Sound_Sensor_Power(uint8_t state) {
GPIO_WriteBit(POWER_GPIO_PORT, POWER_GPIO_PIN, (BitAction)state);
}
这个项目最让我惊喜的是KY-037的可靠性——在工作室测试期间连续工作72小时没有出现误触发。建议初学者可以尝试用不同材质的容器罩住传感器,观察对灵敏度的影响(金属外壳的屏蔽效果特别明显)。下一步我准备把这个系统改造成婴儿房监控装置,增加短信报警功能。