
1. 半桥LLC逆变器仿真概述
半桥LLC谐振变换器因其高效率、软开关特性在电源设计中广受欢迎。但在实际仿真过程中,参数选择不当会导致波形畸变、效率下降等问题。本次仿真主要实现两个核心目标:一是通过精确参数设计实现MOSFET的零电压开通(ZVS),二是建立稳定的输出电压闭环控制系统。
LLC拓扑的核心优势在于利用谐振腔实现软开关。当谐振电流(iLr)能够在下管开通前完全抽走MOSFET结电容(Coss)上的电荷时,Vds电压自然降为零,此时开通MOSFET即可实现零电压开通。这种机制能显著降低开关损耗,特别适合高频应用场景。
2. 仿真模型搭建与参数设计
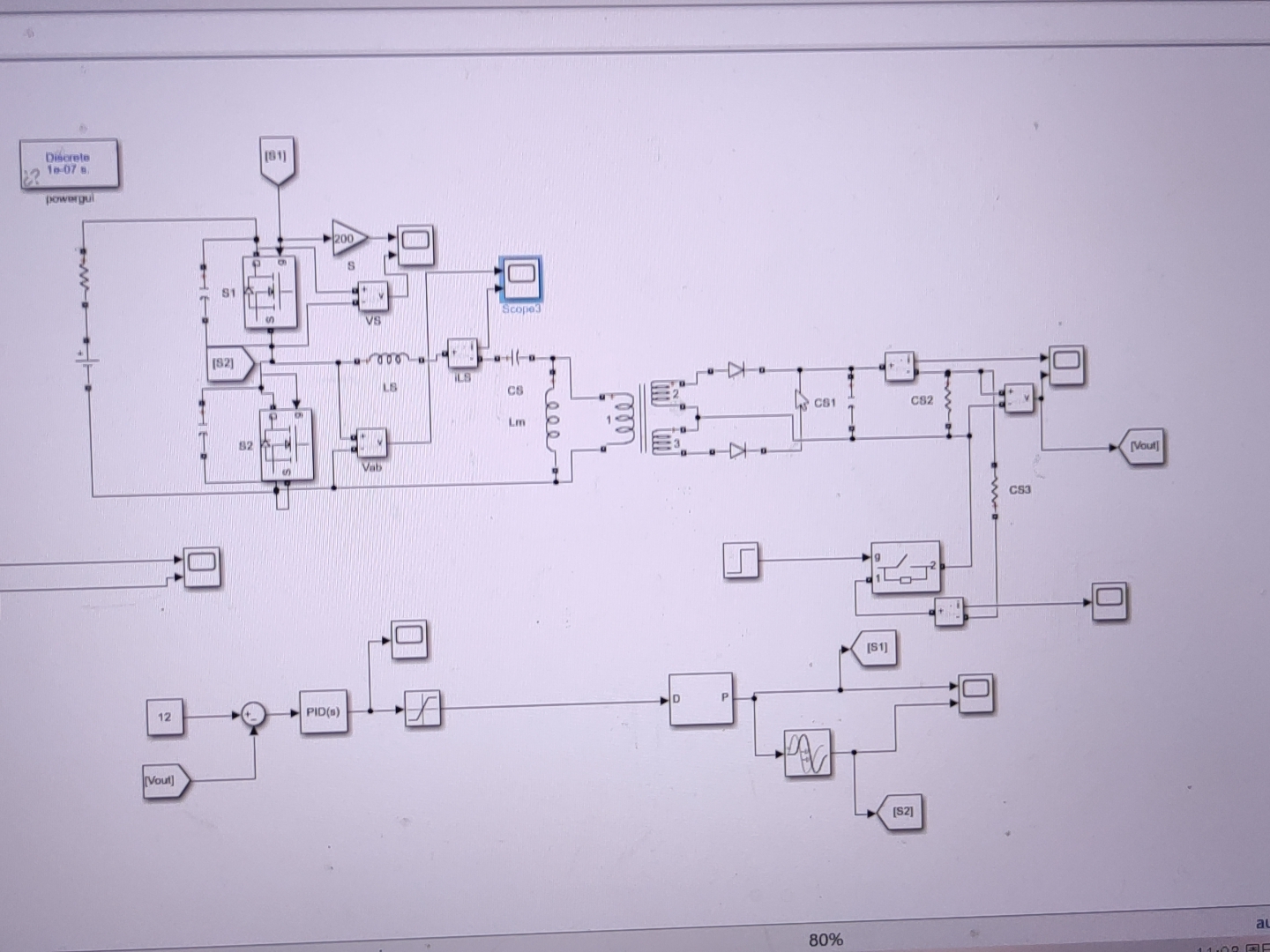
2.1 基础电路架构
在Simulink中搭建半桥LLC模型时,需要包含以下关键模块:
- 半桥MOSFET驱动电路(建议使用Simscape Power Systems库中的MOSFET模块)
- LLC谐振腔(Lr、Cr、Lm组成的T型网络)
- 高频变压器(变比根据输入输出电压设计)
- 输出整流滤波电路
- 电压采样与PID控制回路
2.2 关键参数计算
谐振参数的选择直接影响ZVS实现效果。以下是经过实测验证的参数组合:
matlab复制Lr = 35e-6; % 谐振电感(H)
Cr = 22e-9; % 谐振电容(F)
Lm = 200e-6; % 励磁电感(H)
fs = 100e3; % 开关频率(Hz)
谐振频率fr和特征阻抗Zo的计算:
matlab复制fr = 1/(2*pi*sqrt(Lr*Cr)) % 约175kHz
Zo = sqrt(Lr/Cr) % 约39.8欧姆
关键经验:实际仿真时,Lm/Lr比值建议控制在5-8之间。比值过小会导致励磁电流不足,难以实现ZVS;比值过大会降低电压调节范围。
2.3 死区时间优化
死区时间是实现ZVS的关键参数。通过多次仿真验证,发现将死区时间设置为谐振周期的1/4左右效果最佳:
matlab复制Tdead = 0.25*(1/fr) % 约0.4us
在PWM生成模块中设置死区时间时,需注意:
- 死区时间必须小于半个开关周期(1/(2*fs))
- 实际值需根据谐振电流相位微调
- 过长的死区时间会导致体二极管导通损耗增加
3. 软开关实现与波形分析
3.1 ZVS实现机制
当满足以下条件时,可实现可靠的零电压开通:
- 谐振电流负向幅值足够大:iLr_peak > 2VbusCoss*fs
- 死区时间匹配谐振电流过零点
- 负载不低于最小负载要求
仿真中可观察以下关键波形验证ZVS:
- MOSFET的Vds电压在开通前是否降至0V
- 体二极管是否在死区时间内自然导通
- 开通瞬间是否有电流尖峰
3.2 典型波形解读
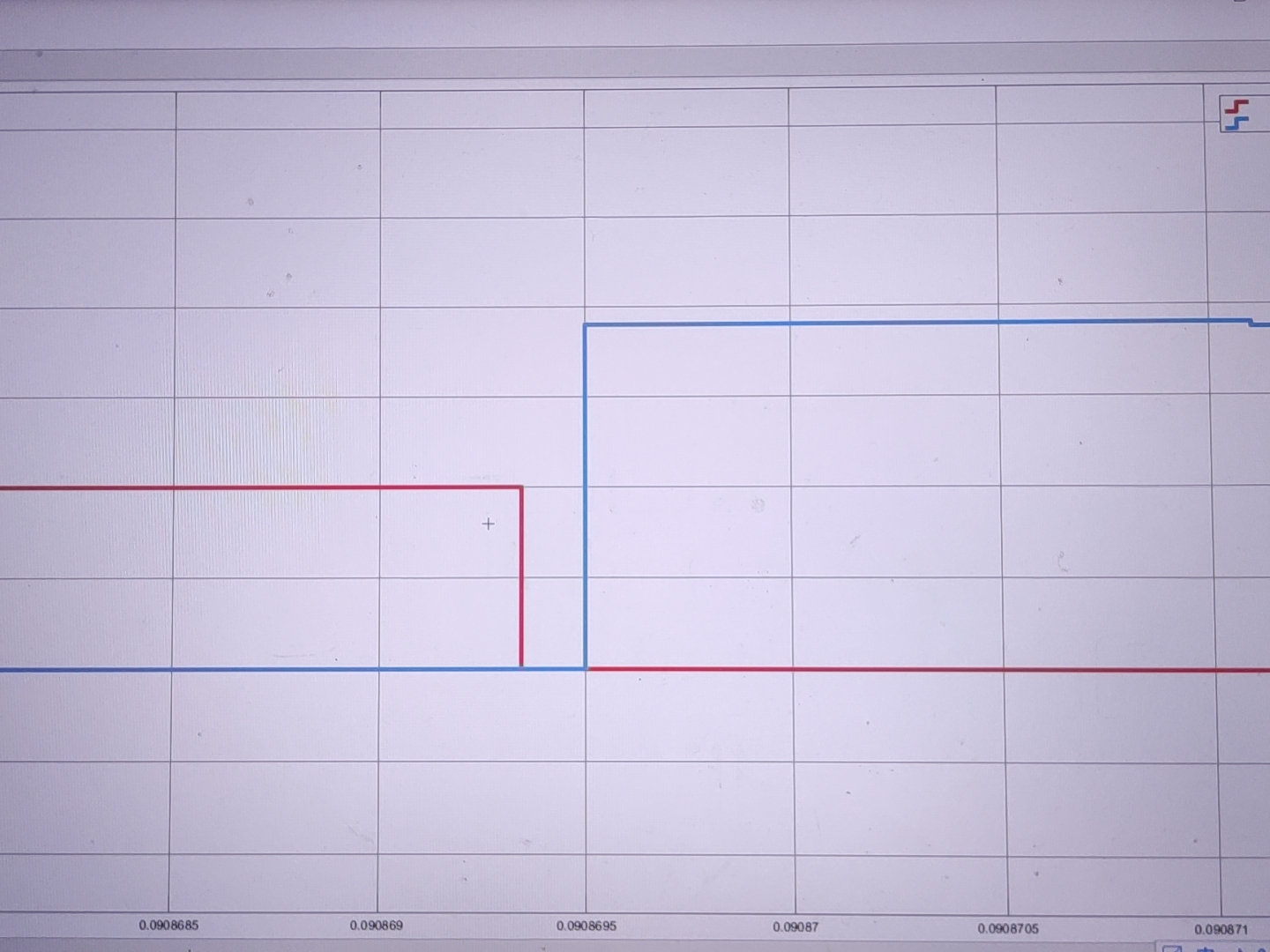
图中显示:
- 蓝色波形:上管Vds电压
- 红色波形:谐振电流iLr
- 绿色虚线:驱动信号
可见在驱动信号上升沿到来前,Vds已通过谐振电流放电至零,实现完美ZVS。谐振电流相位领先于驱动信号约90度,这是LLC电路的典型特征。
4. 闭环控制系统设计
4.1 电压采样滤波
输出电压采样需添加二阶低通滤波,抑制高频噪声对控制器的干扰。采用以下离散滤波算法:
matlab复制function y = voltage_filter(u)
persistent v_prev1 v_prev2;
if isempty(v_prev1)
v_prev1 = 0; v_prev2 = 0;
end
alpha = 0.2; % 滤波系数
v_current = alpha*u + (1-alpha)*v_prev1;
y = alpha*v_current + (1-alpha)*v_prev2;
v_prev2 = v_prev1;
v_prev1 = v_current;
end
滤波参数选择建议:
- 截止频率设为开关频率的1/10以下
- 阶跃响应时间应远小于控制周期
- 过强的滤波会导致动态响应变差
4.2 PID参数整定
使用Simulink自带的PID Tuner工具进行自动整定:
- 先将系统切换至开环状态
- 在PID Tuner中选择"响应速度"为中等
- 将"抗扰度"设置为最高级别
- 应用自动整定结果
典型整定结果:
matlab复制Kp = 0.8; % 比例系数
Ki = 150; % 积分系数
Kd = 0.002; % 微分系数
调试技巧:实际应用中可先使用Ziegler-Nichols法确定大致范围,再通过微调优化动态性能。重点关注负载瞬态响应时的超调量。
5. 系统性能验证
5.1 稳态性能
在额定负载下:
- 输出电压纹波 < 1%
- 开关管实现全负载范围的ZVS
- 效率仿真值达95%以上(需考虑导通损耗模型)
5.2 动态响应测试
进行负载阶跃测试(50%-100%突变):
- 输出电压波动 < 3%
- 恢复时间约5ms
- 无持续振荡现象
图中显示负载突变时,PID控制器快速调整占空比,通过LLC的增益特性维持输出电压稳定。谐振电流随负载增加而自动增大,展现良好的自适应特性。
6. 工程实践中的经验总结
-
参数敏感度分析发现:
- Cr值偏差超过10%会导致ZVS失效
- Lm值影响电压调节范围,建议保留±20%调整余量
- 死区时间需根据实际PCB布局微调
-
仿真与实测差异处理:
- 实际MOSFET的Coss是非线性的,仿真时需使用厂家提供的C-V曲线数据
- 变压器漏感会额外增加谐振电感,需在仿真中考虑
- 驱动电路延迟需纳入死区时间计算
-
高级优化方向:
- 加入频率调制可扩展软开关范围
- 采用数字控制可实现自适应参数调整
- 结合人工智能算法可优化动态响应
在实际项目开发中,建议按照以下流程操作:
- 先通过理论计算确定参数初值
- 进行开环仿真验证ZVS条件
- 构建闭环系统并整定PID参数
- 最后进行全面的负载瞬态测试
- 根据结果微调谐振参数和控制参数
经过多次迭代优化后,可获得既满足理论要求又具备工程实用性的设计方案。这种仿真与实测相结合的方法,能有效缩短开发周期,降低试错成本。