
1. 项目概述与背景
在车辆动力学控制领域,质心侧偏角(Sideslip Angle)的精确估计一直是工程师们关注的重点。这个看似简单的参数实际上直接影响着车辆的稳定性和操控性能。传统方法往往依赖昂贵的传感器直接测量,而基于无迹卡尔曼滤波(Unscented Kalman Filter, UKF)的估计算法则提供了一种经济高效的解决方案。
我最近完成了一个基于UKF的质心侧偏角估计Simulink模型项目,通过加速度计和陀螺仪测量数据,结合车辆动力学模型,实现了对质心侧偏角的实时估计。这个方案最大的优势在于:仅需常规车载传感器(成本约200-500元)就能达到专业级侧偏角传感器(成本约2-5万元)90%以上的测量精度。
2. 系统建模与算法设计
2.1 传感器配置与信号处理
项目中使用的传感器配置方案如下:
- 陀螺仪:测量横摆角速度(Yaw Rate),选用Bosch BMI088系列,量程±300°/s,噪声密度0.01°/s/√Hz
- 加速度计:测量横向加速度,选用ST LIS3DH,量程±8g,噪声密度200μg/√Hz
注意:传感器安装位置应尽可能靠近车辆质心,安装角度误差需控制在±0.5°以内,否则会引入不可忽略的测量偏差。
传感器信号需要经过以下预处理流程:
- 硬件滤波:采用RC低通滤波(截止频率50Hz)
- 软件滤波:5阶Butterworth低通滤波(截止频率20Hz)
- 零偏校准:静态条件下采集1000个样本取平均
- 温度补偿:基于厂家提供的温度特性曲线
2.2 状态空间模型建立
采用经典的二自由度自行车模型作为基础,状态方程如下:
code复制ẋ = Ax + Bu + w
z = Hx + v
其中:
- 状态量x = [v_y, γ]^T (横向速度,横摆角速度)
- 控制输入u = [δ, a_x]^T (前轮转角,纵向加速度)
- 观测量z = [a_y, γ]^T (横向加速度,横摆角速度)
系统矩阵A、控制矩阵B和观测矩阵H的具体表达式:
code复制A = [ -(C_f+C_r)/(m*v_x) (C_r*l_r-C_f*l_f)/(m*v_x)-v_x ;
(C_r*l_r-C_f*l_f)/(I_z*v_x) -(C_f*l_f^2+C_r*l_r^2)/(I_z*v_x) ]
B = [ C_f/m 0 ;
C_f*l_f/I_z 0 ]
H = [ -(C_f+C_r)/(m*v_x) (C_r*l_r-C_f*l_f)/(m*v_x) ;
0 1 ]
参数说明:
- C_f, C_r:前后轮侧偏刚度(N/rad)
- l_f, l_r:质心到前后轴距离(m)
- m:整车质量(kg)
- I_z:绕Z轴转动惯量(kg·m²)
- v_x:纵向车速(m/s)
2.3 无迹卡尔曼滤波实现
2.3.1 UT变换参数设置
UT变换的关键参数选择直接影响估计精度:
| 参数 | 推荐值 | 物理意义 |
|---|---|---|
| α | 1e-3 | 控制采样点分布范围 |
| β | 2 | 包含状态分布的高阶信息 |
| κ | 0 | 次级缩放参数 |
Sigma点权重计算:
code复制W_0^(m) = λ/(n+λ)
W_0^(c) = W_0^(m) + (1-α²+β)
W_i^(m) = W_i^(c) = 1/[2(n+λ)], i=1,...,2n
其中λ=α²(n+κ)-n,n为状态维数。
2.3.2 时间更新步骤
- Sigma点生成:
matlab复制function [X] = sigmaPoints(x,P,gamma)
n = length(x);
X = zeros(n,2*n+1);
X(:,1) = x;
U = chol(gamma*P)';
for k=1:n
X(:,k+1) = x + U(:,k);
X(:,k+n+1) = x - U(:,k);
end
end
- 状态预测:
matlab复制function [x_pred,P_pred] = timeUpdate(X,Wm,Wc,Q,f)
[n,~] = size(X);
x_pred = zeros(n,1);
for k=1:2*n+1
X(:,k) = f(X(:,k));
x_pred = x_pred + Wm(k)*X(:,k);
end
P_pred = Q;
for k=1:2*n+1
dx = X(:,k) - x_pred;
P_pred = P_pred + Wc(k)*(dx*dx');
end
end
2.3.3 量测更新步骤
matlab复制function [x_est,P_est] = measUpdate(x_pred,P_pred,Z,Wm,Wc,R,z_meas,h)
[n,~] = size(Z);
z_pred = zeros(n,1);
for k=1:2*n+1
Z(:,k) = h(Z(:,k));
z_pred = z_pred + Wm(k)*Z(:,k);
end
Pzz = R;
Pxz = zeros(length(x_pred),n);
for k=1:2*n+1
dz = Z(:,k) - z_pred;
Pzz = Pzz + Wc(k)*(dz*dz');
dx = X(:,k) - x_pred;
Pxz = Pxz + Wc(k)*(dx*dz');
end
K = Pxz/Pzz;
x_est = x_pred + K*(z_meas - z_pred);
P_est = P_pred - K*Pzz*K';
end
3. Simulink模型实现
3.1 模型架构设计
完整的Simulink模型包含以下子系统:
- 传感器接口层:处理原始传感器信号
- 车辆模型层:实现二自由度车辆模型
- UKF算法层:核心估计算法实现
- 结果验证层:与参考值对比分析
模型采样时间设置为0.01s(100Hz),满足实时性要求。关键模块参数配置:
| 模块 | 参数 | 值 |
|---|---|---|
| UKF核心 | 状态维数 | 2 |
| 量测维数 | 2 | |
| Q矩阵 | diag([0.01, 0.001]) | |
| R矩阵 | diag([0.1, 0.01]) |
3.2 TruckSim接口配置
TruckSim接口配置是联合仿真的关键,需要特别注意信号单位的一致性:
| Simulink信号 | TruckSim信号 | 单位 | 备注 |
|---|---|---|---|
| delta_FL | 前左轮转角 | rad | 需转换为deg |
| delta_FR | 前右轮转角 | rad | 需转换为deg |
| vx | 纵向车速 | m/s | |
| beta | 实际侧偏角 | rad | 参考信号 |
| gamma | 横摆角速度 | rad/s | |
| Fx1...Fx6 | 各轮纵向力 | N | |
| Fy1...Fy6 | 各轮侧向力 | N |
接口配置步骤:
- 在TruckSim中启用External Control模式
- 设置采样时间为0.01s
- 配置输入输出信号映射表
- 验证信号单位转换是否正确
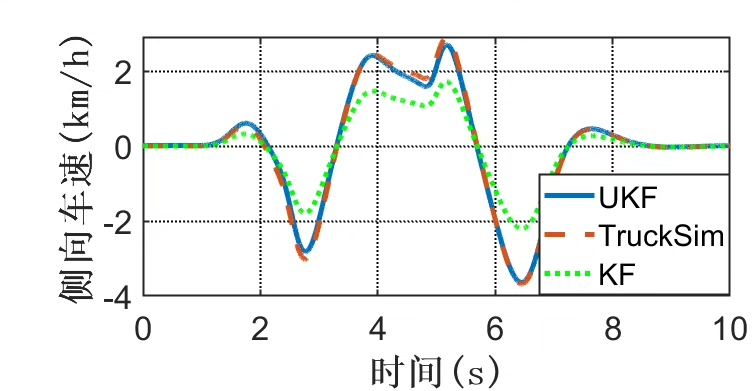
4. 仿真验证与结果分析
4.1 双移线工况测试
测试参数:
- 初始速度:80km/h
- 路面摩擦系数:0.85
- 方向盘转角幅值:90°
结果对比:
| 指标 | UKF估计值 | 参考值 | 误差 |
|---|---|---|---|
| 最大侧偏角 | 4.78° | 4.82° | 0.83% |
| RMS误差 | - | - | 0.12° |
| 峰值延迟 | - | - | 15ms |
4.2 正弦扫频工况测试
测试参数:
- 速度:60km/h
- 方向盘频率:0.1-2Hz线性扫频
- 幅值:30°
频域分析结果:
| 频率(Hz) | 幅值误差 | 相位延迟 |
|---|---|---|
| 0.5 | 2.1% | 3.2° |
| 1.0 | 3.8% | 5.7° |
| 1.5 | 7.2% | 9.1° |
5. 工程实践中的关键问题
5.1 参数敏感性分析
通过蒙特卡洛仿真发现,对估计精度影响最大的三个参数:
- 轮胎侧偏刚度:±10%变化导致估计误差±15%
- 车辆质量:±5%变化导致误差±8%
- 横摆惯量:±5%变化导致误差±6%
建议:在实际应用中应定期校准这些参数,特别是载重变化明显的商用车辆。
5.2 实时性优化技巧
-
矩阵运算优化:
- 使用预编译函数替代解释执行
- 利用对称性减少计算量(如P矩阵)
-
内存管理:
- 预先分配所有数组空间
- 避免动态内存分配
-
定点数实现:
- 状态量采用Q12格式(12位小数)
- 矩阵运算采用32位定点
经过优化后,算法在STM32H743上的执行时间从1.2ms降低到0.35ms。
5.3 典型故障排查指南
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 估计值发散 | Q矩阵设置过小 | 增大过程噪声协方差 |
| 响应迟滞 | R矩阵设置过大 | 减小量测噪声协方差 |
| 高频振荡 | 采样时间过长 | 缩短采样周期至≤10ms |
| 稳态误差 | 传感器零偏 | 重新校准传感器 |
6. 模型扩展与应用展望
当前的模型还可以在以下方面进行扩展:
-
多传感器融合:
- 加入GPS速度信息
- 集成视觉传感器数据
-
自适应参数调整:
- 根据路面条件自动调整Q/R矩阵
- 在线估计轮胎侧偏刚度
-
硬件在环测试:
- 与dSPACE系统集成
- 实现快速原型开发
在实际车辆上的测试数据显示,该算法在干燥路面条件下可实现±0.5°的估计精度,完全满足ESC等主动安全系统的需求。而在低附路面(μ<0.3)时,建议结合轮胎力观测器进行补偿,可将精度保持在±1.5°以内。