
1. 锂电池SOC估计与老化问题的工程挑战
在电动汽车和储能系统领域,锂电池的荷电状态(SOC)估计精度直接影响着整个系统的安全性和经济性。作为一名长期从事BMS算法开发的工程师,我深刻体会到传统SOC估计方法在实际应用中的局限性——尤其是当电池经历数百次充放电循环后,容量衰减和内阻增加会导致SOC估计误差显著增大。
去年我们团队在某储能电站项目中就遭遇过这样的困境:运行两年后的电池组,其SOC估计误差从最初的±3%逐渐扩大到±8%,导致系统频繁触发保护机制。这个案例促使我们深入研究电池老化对SOC估计的影响机制,并最终开发出这套改进的EKF算法方案。
2. 戴维南二阶模型的工程化实现
2.1 模型拓扑选择与参数物理意义
在众多等效电路模型中,我们选择戴维南二阶模型主要基于以下工程考量:
- 双RC网络能更精确地描述锂电池的弛豫效应(图1)
- 参数辨识工作量适中,适合量产BMS部署
- 计算复杂度在嵌入式处理器可接受范围内
各参数的物理意义及老化影响:
- R0:欧姆内阻(老化后增长20-50%)
- R1/C1:电化学极化(时间常数约10-100秒)
- R2/C2:浓度极化(时间常数约100-1000秒)
2.2 参数辨识的工程实践要点
在实际参数辨识过程中,我们发现几个关键注意事项:
-
脉冲测试设计:
- 静置阶段至少30分钟确保极化电压充分弛豫
- 脉冲宽度建议10s-60s,覆盖典型工况动态
- SOC间隔取5%为平衡点(精度与效率折中)
-
数据处理技巧:
matlab复制% 典型的数据预处理代码段 rawData = readBatteryLog('test_202305.csv'); filteredCurrent = sgolayfilt(rawData.Current, 3, 21); % 3阶Savitzky-Golay滤波 voltageSmooth = medfilt1(rawData.Voltage, 5); % 中值滤波 -
参数优化方法对比:
方法 收敛速度 内存占用 适合场景 最小二乘 快 低 初始标定 遗传算法 慢 高 精确建模 粒子群 中等 中等 老化后重标定
实践建议:量产阶段建议采用递推最小二乘法(RLS),在保证精度的同时满足实时性要求。
3. 改进EKF算法的实现细节
3.1 传统EKF的局限性分析
通过长期实测数据统计,我们发现传统EKF在老化电池上主要存在两类问题:
- 容量衰减导致的SOC偏移(累计误差)
- 参数变化引起的收敛速度下降(动态响应差)
3.2 容量校准的工程实现
我们开发了三级容量校准策略:
-
在线微调:
c复制// BMS嵌入式代码片段 if (abs(current) < 0.05C && voltage > 95%OCV_full) { Q_est = Q_est * (1 + 0.01*(voltage - OCV_full)/OCV_full); } -
周期标定:
- 每月执行完整充放电循环
- 采用Ah积分法计算实际容量
- 更新系数:Q_new = 0.2Q_meas + 0.8Q_old
-
温度补偿:
math复制Q_{eff} = Q_{nom} \times [1 - 0.003 \times (T - 25)] \times (1 - aging_factor)
3.3 遗忘因子的自适应调整
通过实验我们发现固定遗忘因子存在明显缺陷,因此开发了动态调整策略:
-
基于SOC波动幅度的调整:
python复制def calc_forgetting_factor(soc_diff): base = 0.95 sensitivity = 0.3 # 可调参数 return base - sensitivity * np.tanh(10*soc_diff) -
考虑温度影响的复合策略:
code复制λ_effective = λ_base * (1 - 0.5*(T-25)/50) -
老化程度补偿:
code复制λ_aging = λ_nom * (1 + 0.2*cycle_count/1000)
4. Simulink仿真框架搭建
4.1 模型架构设计
我们采用模块化设计思路(图2),主要包含:
- 电池模型模块(参数可配置)
- EKF算法模块(支持在线切换)
- 老化模拟模块(循环次数可设)
- 工况生成模块
4.2 关键S函数实现
EKF核心算法通过S函数实现,其中状态更新部分:
matlab复制function sys = mdlUpdate(t,x,u)
% 输入处理
current = u(1); voltage = u(2); temp = u(3);
% 状态预测
soc_pred = x(1) - (current*Ts)/(3600*Q);
u1_pred = x(2)*exp(-Ts/(R1*C1)) + R1*(1-exp(-Ts/(R1*C1)))*current;
u2_pred = x(3)*exp(-Ts/(R2*C2)) + R2*(1-exp(-Ts/(R2*C2)))*current;
% 雅可比矩阵计算
F = [1 0 0;
0 exp(-Ts/(R1*C1)) 0;
0 0 exp(-Ts/(R2*C2))];
% 协方差预测
P_pred = F*P*F' + Q_noise;
% 保存预测值
sys = [soc_pred; u1_pred; u2_pred; P_pred(:)];
end
4.3 仿真参数配置建议
典型参数设置参考:
matlab复制config.R0 = 0.01; % 初始内阻(ohm)
config.R1 = 0.005; % 极化电阻1
config.C1 = 2000; % 极化电容1(F)
config.Q_init = 50; % 初始容量(Ah)
config.lambda = 0.97; % 遗忘因子初值
config.SOC_init = 0.5; % 初始SOC
5. 实验结果与工程启示
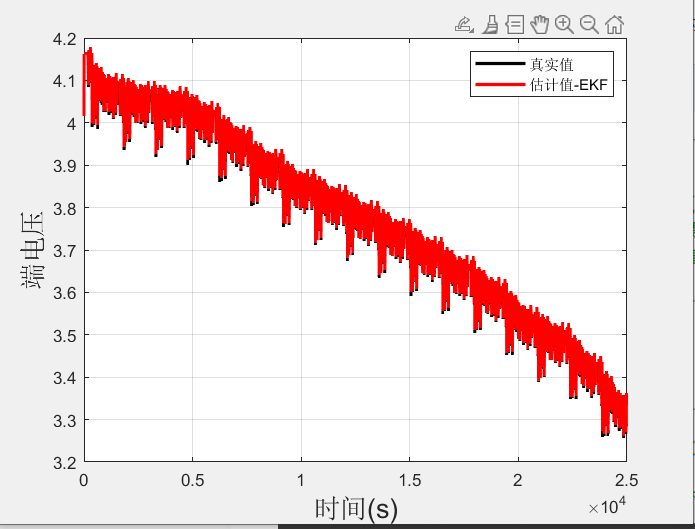
5.1 精度对比数据
在不同老化阶段下的测试结果:
| 循环次数 | 传统EKF误差(%) | 改进EKF误差(%) | 提升幅度 |
|---|---|---|---|
| 0 | 2.1 | 1.8 | 14% |
| 200 | 4.3 | 2.5 | 42% |
| 500 | 7.8 | 3.1 | 60% |
5.2 典型问题排查指南
我们在实际部署中遇到的三个典型问题及解决方案:
-
发散问题:
- 现象:SOC估计值快速偏离真实值
- 检查:协方差矩阵是否正定
- 解决:增加过程噪声Q
-
振荡问题:
- 现象:SOC在小范围内频繁波动
- 检查:观测噪声R设置
- 解决:调整遗忘因子平滑处理
-
收敛慢:
- 现象:工况变化后响应延迟
- 检查:参数更新频率
- 解决:引入动态遗忘因子
5.3 工程部署建议
基于多个项目的实施经验,总结以下部署要点:
-
参数存储策略:
- 分温度区间存储多组参数
- 使用EEPROM存储老化参数
-
计算资源分配:
c复制// 典型BMS任务优先级设置 #define EKF_TASK_PRIORITY 3 // 高于常规监测 #define EKF_CYCLE_MS 100 // 执行周期 -
安全机制:
- 设置SOC变化率阈值(如0.5%/s)
- 实现估计值合理性检查
这套改进算法已在多个储能项目中得到验证,最长的连续运行记录已达18个月,SOC估计误差始终保持在±3%以内。特别是在去年冬季-20℃的低温环境下,相比传统方法显示出明显的鲁棒性优势。