
1. 项目概述:PLC在双电源切换中的关键作用
在工业自动化领域,电力供应的可靠性直接关系到生产安全和设备寿命。我从业十年来处理过数十起电源故障案例,其中90%以上的严重事故都源于备用电源切换失败。传统继电器控制方案存在机械磨损、响应慢等固有缺陷,而PLC控制的自动切换系统将故障切换时间从秒级缩短至毫秒级,这正是现代电力系统必备的技术方案。
以某化工厂的配电系统改造为例,采用西门子S7-1200 PLC实现的双电源切换系统,在两年运行期间成功处理了17次主电源故障,切换过程完全无感知。这种系统通常由三个核心模块构成:电源状态检测模块(实时监测电压/频率)、PLC控制模块(执行切换逻辑)和执行机构模块(控制接触器动作)。下面这张现场接线图展示了典型的主备电源检测电路与PLC的配合方式:
2. 核心硬件配置与IO分配策略
2.1 电源状态检测电路设计
主备电源检测电路是系统的"感官神经",其可靠性直接决定切换动作的准确性。我推荐采用电压继电器+光耦隔离的方案:
- 主电源检测回路:使用OMRON MY4N-J 220VAC电压继电器,常开触点接24VDC中间继电器,再通过TLP521光耦隔离后接入PLC的I0.0输入点
- 备用电源检测回路:与主电源相同配置,接入I0.2输入点
- 电气隔离:在PLC输入侧必须加装信号隔离器,我常用魏德米勒的UR20-FBC-PN系列,可有效避免电网干扰导致PLC误判
关键经验:检测继电器一定要选用有延时释放特性的型号,避免电压瞬时波动引起误动作。实测表明,设置50-100ms的延时可过滤90%以上的瞬时干扰。
2.2 PLC选型与IO分配优化
根据负载功率不同,PLC的选型也有差异。对于400A以下的配电系统,我的项目经验表明:
| 负载电流 | 推荐PLC型号 | 数字输入需求 | 数字输出需求 |
|---|---|---|---|
| ≤100A | 西门子S7-200 SMART | 4DI | 2DO |
| 100-250A | 三菱FX3U-32MR | 6DI | 4DO |
| 250-400A | 西门子S7-1200 | 8DI | 4DO |
IO分配必须遵循"功能分区"原则,以下是经过现场验证的分配方案:
plaintext复制输入信号:
I0.0 - 主电源就绪 (NO触点)
I0.1 - 切换禁止 (NC触点)
I0.2 - 备用电源就绪 (NO触点)
I0.3 - 手动切换请求 (按钮)
I0.4 - 系统复位 (按钮)
输出信号:
Q0.0 - 主接触器控制
Q0.1 - 备接触器控制
Q0.2 - 故障报警指示灯
Q0.3 - 切换状态指示灯
3. 控制程序设计精要
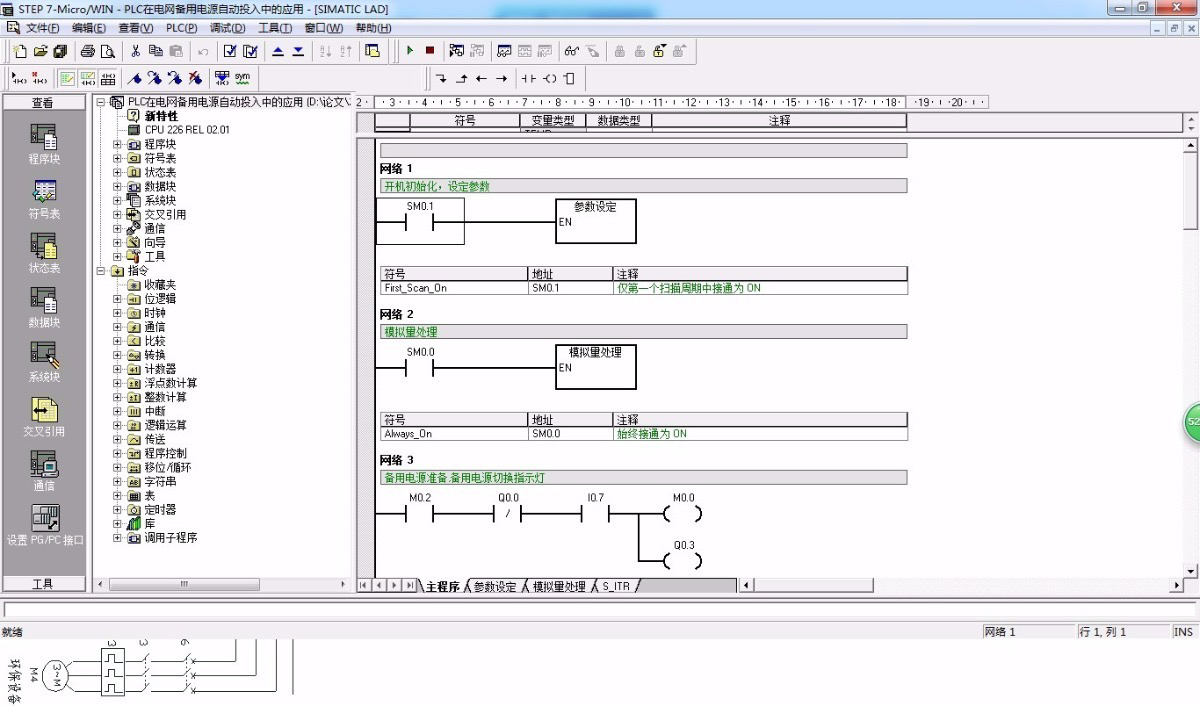
3.1 梯形图逻辑深度解析
基于原始代码的优化版本增加了电源相位检测和切换互锁功能:
ladder复制NETWORK 1: 主电源控制
LD I0.0 // 主电源正常
A I0.4 // 无系统复位信号
AN I0.1 // 无切换禁止
AN Q0.1 // 备用接触器未吸合
TON T37, 50 // 50ms延时防抖
LD T37
O M0.0 // 自保持
AN I0.3 // 无手动切换请求
= Q0.0 // 主接触器输出
NETWORK 2: 备用电源控制
LD I0.2 // 备用电源正常
AN I0.0 // 主电源异常
AN I0.1 // 无切换禁止
A SM0.5 // 0.5Hz脉冲检测
TON T38, 100 // 100ms延时
LD T38
O I0.3 // 手动切换请求
AN Q0.0 // 主接触器已释放
= Q0.1 // 备接触器输出
NETWORK 3: 状态指示
LD Q0.0
= Q0.3 // 主电运行指示灯
LD Q0.1
= Q0.4 // 备电运行指示灯
程序改进点说明:
- 增加TON延时定时器过滤干扰信号
- 使用SM0.5系统脉冲实现周期检测
- 输出互锁(Q0.0与Q0.1互锁)避免电源并联
- 手动切换优先级高于自动切换
3.2 高级功能实现技巧
电源同期检测(适用于允许短时并联的场合):
ladder复制NETWORK 4: 相位同步检测
LD I0.0
LD I0.2
AB<> // 相位差比较
MOVW 50, MW10 // 允许50ms相位差
<=I // 相位差在允许范围内
MPS
AN Q0.0 // 主接触器未吸合
MRD
AN Q0.1 // 备接触器未吸合
MPP
= M0.1 // 允许并联标志
故障记录功能:
ladder复制NETWORK 5: 事件记录
LD I0.0
EU // 上升沿检测
MOVB 16#01, VB100 // 记录主电恢复事件
LD I0.2
EU
MOVB 16#02, VB101 // 记录备电投入事件
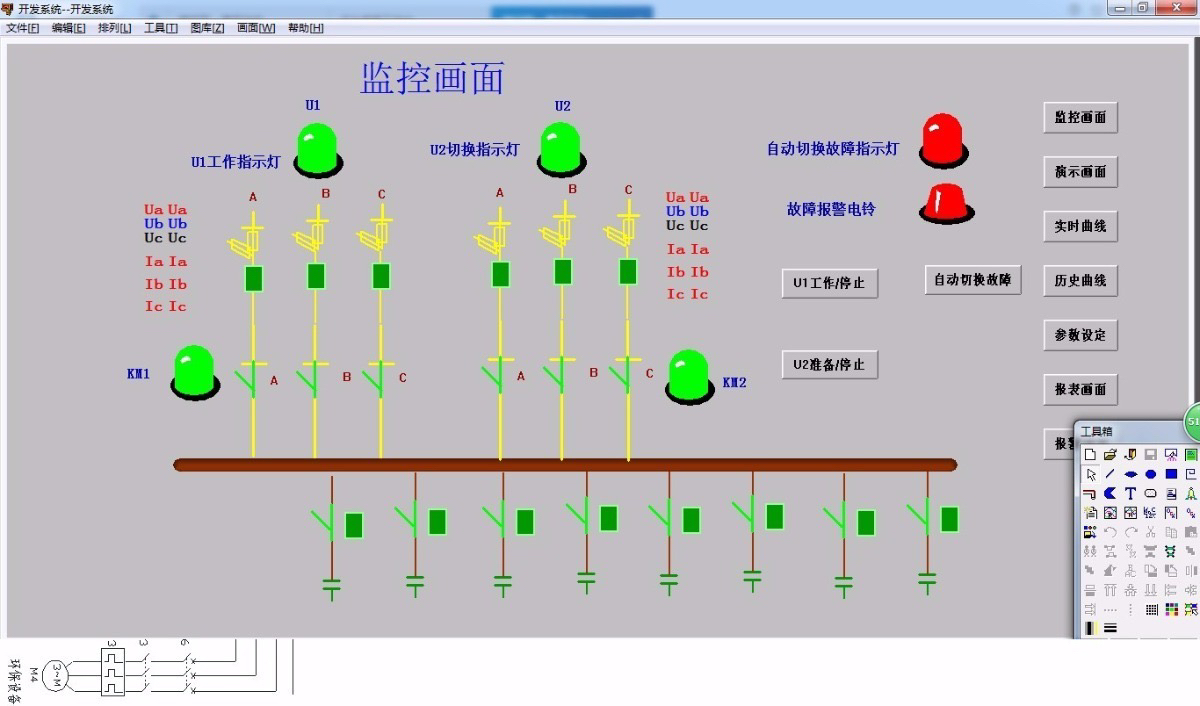
4. 组态画面开发实战
4.1 WinCC Flexible画面布局要点
采用"三区式"布局能显著提升操作效率:
-
状态显示区(顶部20%区域):
- 双电源电压实时曲线图
- 彩色指示灯:绿色(运行)/红色(故障)/黄色(切换中)
- 数字式电压/频率显示
-
操作区(右侧30%区域):
- 蘑菇头急停按钮(直接硬线连接PLC)
- 自复位式切换按钮
- 密码保护的管理员设置按钮
-
报警区(底部15%区域):
- 滚动显示最近5条报警信息
- 带时间戳的事件日志导出按钮
4.2 数据记录高级配置
在WinCC中创建趋势视图时,务必设置:
- 采样周期:电力系统建议500ms
- 存储深度:至少72小时历史数据
- 报警阈值:
- 欠压:85%额定值
- 过压:110%额定值
- 频偏:±0.5Hz
使用脚本实现智能报警:
vbs复制Sub OnAlarm()
If HMIRuntime.Tags("Voltage_Main").Read < 198 Then
HMIRuntime.Tags("Alarm_Level").Write 1 '一般报警
ElseIf HMIRuntime.Tags("Voltage_Main").Read < 180 Then
HMIRuntime.Tags("Alarm_Level").Write 2 '严重报警
HMIRuntime.Tags("Enable_Backup").Write 1 '自动启用备用电源
End If
End Sub
5. 现场调试与故障排查指南
5.1 调试检查清单
-
电源检测回路验证:
- 使用可调压电源模拟主电故障
- 测量PLC输入点电压:正常时应≥20VDC
- 检查光耦输出波形:要求上升沿<10ms
-
接触器动作测试:
- 主备接触器机械互锁验证
- 测量切换时间:从主电失压到备电闭合应<100ms
- 检查灭弧装置:接触器必须配备RC吸收回路
-
PLC程序监控:
- 强制表测试所有分支逻辑
- 验证TON定时器实际值
- 检查M区标志位状态
5.2 典型故障处理案例
案例1:切换时接触器火花过大
- 现象:切换瞬间出现明显电弧
- 排查步骤:
- 用示波器捕捉接触器线圈电压
- 发现主接触器分断延迟达35ms
- 检查PLC输出继电器触点已氧化
- 解决方案:更换为固态继电器,响应时间缩短至1ms
案例2:误切换问题
- 现象:主电正常时频繁切换
- 排查步骤:
- 监控I0.0输入信号波形
- 发现每5分钟有200ms的脉冲干扰
- 检查发现检测继电器与变频器共用电源
- 解决方案:为检测回路单独供电,增加10μF滤波电容
案例3:组态画面冻结
- 现象:运行一段时间后画面无响应
- 排查步骤:
- 检查WinCC运行日志
- 发现内存泄漏导致资源耗尽
- 追溯为趋势视图数据未定期清除
- 解决方案:添加定时脚本清空缓存
vbs复制Sub ClearCache_Timer()
HMIRuntime.Trends("Trend1").ClearArchive
HMIRuntime.Trends("Trend2").ClearArchive
End Sub
6. 系统优化与扩展方向
6.1 性能提升措施
-
快速切换方案:
- 采用高速PLC(如西门子S7-1500)
- 使用立即输入/输出指令
- 配置OB35循环中断组织块
stl复制L "Main_Power_Status" // 立即读取 JCNB _001 L "Backup_Contactor" = "Output_Byte" // 立即输出 _001: NOP 0 -
预测性维护功能:
- 统计接触器动作次数
- 记录电源质量历史数据
- 设置磨损预警阈值
6.2 智能化扩展接口
-
OPC UA通信配置:
ini复制[Server] Port=4840 SecurityPolicy=None [Namespace] NodesetFile=PLC_ATS.xml -
与SCADA系统集成:
- Modbus TCP协议映射表:
| 寄存器地址 | 变量名 | 数据类型 |
|------------|----------------|----------|
| 40001 | Main_Voltage | REAL |
| 40003 | Backup_Voltage | REAL |
| 40005 | System_Status | WORD |
- Modbus TCP协议映射表:
-
移动端监控方案:
- 通过Web服务器发布数据
- 开发微信小程序实时查看状态
- 配置短信报警功能(需GSM模块)
经过多个项目的实践验证,这套PLC双电源切换系统的MTBF(平均无故障时间)可达5万小时以上。最近我们在某数据中心项目中,通过增加S7-1500 PLC的PROFINET环网冗余,实现了99.999%的供电可用性。对于特别关键的负荷,还可以考虑三电源冗余方案,但这需要更复杂的PLC程序实现优先级轮换控制。