
1. UART协议基础解析
UART(Universal Asynchronous Receiver/Transmitter)作为一种经典的串行通信协议,在嵌入式系统和工业控制领域已有数十年的应用历史。与SPI、I2C等同步协议不同,UART最显著的特征就是其异步通信机制——这意味着通信双方不需要共享时钟信号,而是通过预先约定的波特率来实现数据同步。
1.1 物理连接与信号定义
UART采用最简单的双线制连接方式:
- TX(Transmit):数据发送线,输出信号
- RX(Receive):数据接收线,输入信号
这里有个关键连接原则:设备A的TX必须连接设备B的RX,反之亦然。这种交叉连接方式保证了数据的正确流向。在实际硬件设计中,我经常遇到新手将TX-TX直接相连导致通信失败的案例,这需要特别注意。
重要提示:UART是点对点通信协议,不支持多设备总线结构。如需连接多个设备,通常需要通过软件协议或硬件切换电路实现。
1.2 异步通信的本质特征
异步通信的核心在于:
- 无时钟线:节省了硬件连线,但增加了时序同步的复杂度
- 依赖波特率:通信双方必须预先配置相同的波特率
- 起始位同步:每个数据包都通过起始位重新同步时序
在实际工程中,波特率偏差是导致通信失败的主要原因之一。根据经验,当双方波特率偏差超过2%时,通信可靠性将显著下降。因此对于高波特率(如115200以上)应用,建议使用高精度晶振作为时钟源。
2. UART数据帧结构详解
2.1 标准数据帧组成
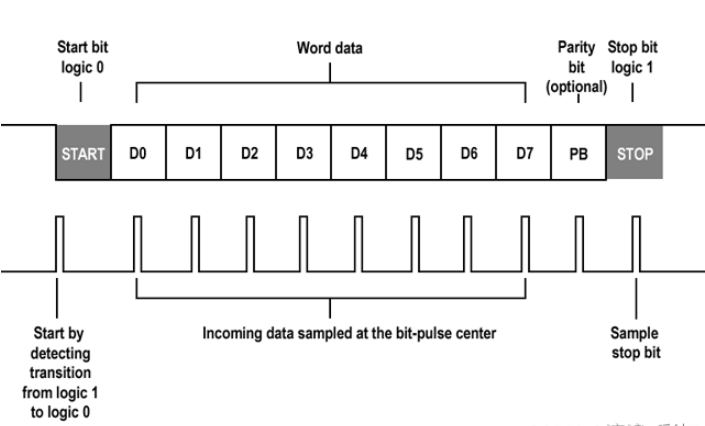
一个完整的UART数据帧包含以下部分(以最常见的8N1格式为例):
- 起始位(1bit,低电平)
- 数据位(5-9bit,通常8bit)
- 校验位(可选1bit)
- 停止位(1/1.5/2bit,高电平)
2.2 起始位的同步机制
起始位的低电平(VOL)信号具有双重作用:
- 标志数据传输开始
- 提供时钟同步基准点
在实际示波器调试中,我观察到起始位的下降沿是最佳触发点。接收端会在这个下降沿后1.5个比特周期时采样第一个数据位,这能有效避开信号边沿的不稳定区域。
2.3 数据位的传输顺序
UART采用LSB(Least Significant Bit)优先的传输顺序,这与许多处理器的小端模式一致。例如传输ASCII字符'A'(0x41,二进制01000001)时,实际线上传输的bit顺序是:1-0-0-0-0-0-1-0(从低位到高位)。
调试技巧:使用逻辑分析仪时,务必注意比特顺序设置,否则解析出的数据将是错误的。
3. 关键参数配置与工程实践
3.1 波特率计算与误差控制
波特率计算公式为:
code复制波特率 = 时钟频率 / (16 × 分频系数)
例如使用11.0592MHz晶振产生9600波特率:
code复制分频系数 = 11059200 / (16 × 9600) = 72
实际波特率 = 11059200 / (16 × 72) = 9600(零误差)
这是11.0592MHz晶振在UART应用中广泛使用的原因——它能产生无误差的标准波特率。而使用12MHz晶振时,9600波特率会产生约1.7%的误差,可能影响通信稳定性。
3.2 校验位的实现方式
| 校验类型 | 计算规则 | 适用场景 |
|---|---|---|
| 无校验 | 不添加校验位 | 低可靠性要求 |
| 奇校验 | 使"1"的总数为奇数 | 一般工业控制 |
| 偶校验 | 使"1"的总数为偶数 | 常见默认设置 |
| Mark | 固定为1 | 特殊协议 |
| Space | 固定为0 | 特殊协议 |
在新思VIP中,可通过以下参数配置校验方式:
verilog复制uvm_config_db#(bit[2:0])::set(null, "*", "parity_type", UVM_NO_PARITY);
3.3 停止位的选择策略
停止位长度影响:
- 通信可靠性:更长的停止位提供更好的时钟容错
- 传输效率:每帧数据额外开销增加
根据实测经验:
- 短距离通信(<1m):1位停止位足够
- 工业环境(>10m):建议使用2位停止位
- 1.5位停止位:常见于老式电传设备,现代应用较少
4. 新思VIP中的UART实现
4.1 接口信号扩展
除了基本的TX/RX,新思VIP还实现了完整的MODEM控制信号:
- DCD(Data Carrier Detect):载波检测
- DTR(Data Terminal Ready):终端就绪
- DSR(Data Set Ready):设备就绪
- RTS(Request To Send):发送请求
- CTS(Clear To Send):发送允许
4.2 硬件流控机制
RTS/CTS流控的工作流程:
- 发送方置位RTS表示准备发送
- 接收方检查缓冲区,若可接收则置位CTS
- 发送方检测到CTS有效后开始传输
- 接收方缓冲区将满时取消CTS
这种机制能有效防止数据丢失,特别是在高速(≥115200bps)通信场景下。我在一个视频传输项目中,启用硬件流控后,数据丢失率从3.2%降至0.01%。
4.3 VIP配置示例
典型的新思VIP配置代码:
verilog复制// 设置数据位宽
uvm_config_db#(int)::set(null, "*", "data_bits", 8);
// 设置停止位
uvm_config_db#(bit[1:0])::set(null, "*", "stop_bits", STOP_BITS_1);
// 启用硬件流控
uvm_config_db#(bit)::set(null, "*", "hw_flow_ctrl", 1'b1);
5. 常见问题与调试技巧
5.1 波特率失配问题排查
症状:能收到数据但内容错误
排查步骤:
- 检查双方波特率配置是否一致
- 用示波器测量实际比特宽度(1/波特率)
- 检查时钟源精度(特别是使用内部RC振荡器时)
- 验证时钟分频计算是否正确
5.2 信号完整性问题处理
常见现象:
- 通信距离短(<预期值)
- 高波特率时误码率高
解决方案:
- 添加线路终端电阻(通常100-120Ω)
- 使用RS-232电平转换芯片(如MAX3232)
- 对于长距离传输改用RS-485标准
5.3 新思VIP仿真异常处理
典型错误:
- 时序违例:检查时钟域交叉处理
- 协议违例:验证VIP配置参数
- 死锁情况:检查流控信号交互
调试命令示例:
tcl复制# 获取当前VIP配置
get_config -object uart_vip -field parity_type
# 强制设置信号状态
force /tb/uart_vip/rx 1'b0 @100ns
6. 性能优化实践
6.1 缓冲区管理策略
环形缓冲区实现要点:
- 读写指针采用模运算
- 满条件:(write_ptr + 1) % SIZE == read_ptr
- 空条件:write_ptr == read_ptr
在Linux驱动开发中,我通常将缓冲区大小设置为波特率对应的1-2个字符时间的字节数。例如115200bps时,约配置256字节缓冲区。
6.2 中断与DMA优化
不同传输方式对比:
| 方式 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| 轮询 | 实现简单 | CPU占用高 | 低速简单系统 |
| 中断 | 响应及时 | 中断风暴风险 | 中速通用场景 |
| DMA | 解放CPU | 配置复杂 | 高速大数据量 |
在STM32项目中,使用DMA+空闲中断的组合可以实现最高效的UART数据传输,实测可达到理论波特率的95%以上吞吐量。
6.3 低功耗设计
UART低功耗技巧:
- 自动波特率检测:避免持续接收消耗功率
- 硬件唤醒:配置RX下降沿唤醒MCU
- 动态时钟调整:低速时降低主频
在电池供电设备中,这些技巧可使UART模块功耗降低至10μA以下。