
1. 柴油发动机MIMO控制概述
在汽车工业领域,柴油发动机的排放控制一直是工程师们面临的重要挑战。现代柴油机通过可变几何涡轮增压器(VGT)和废气再循环(EGR)系统的协同工作来降低氮氧化物(NOx)和颗粒物(PM)排放。这两个系统本质上构成了一个典型的多输入多输出(MIMO)控制问题,因为调节EGR阀门开度(EGRLIFT)和VGT位置(VGTPOS)会同时影响增压压力(BOOST)和EGR质量流量(EGRMF)。
这个案例展示了如何使用MATLAB的Control System Toolbox和Simulink Control Design工具箱,针对2100rpm转速、每缸12mg燃油喷射量的特定工况,设计并优化一个离散时间的MIMO控制器。控制器采样周期为0.2秒,需要满足两个核心目标:在5秒内响应增压压力和EGR流量的设定值变化,同时对燃油量和转速的小幅扰动保持鲁棒性。
实际工程经验表明,柴油发动机在低频段通常表现出病态特性,这意味着BOOST和EGRMF之间存在强耦合,传统单回路PID控制难以取得理想效果,这正是需要MIMO控制方法的原因。
2. 发动机模型与控制架构
2.1 被控对象特性分析
通过系统辨识方法从实验数据获得的线性模型显示,从EGRLIFT和VGTPOS到BOOST和EGRMF的传递函数具有以下关键特性:
matlab复制sigma(Plant(:,1:2)), grid
title('Frequency response of the linearized engine dynamics')
频率响应曲线揭示出两个重要现象:
- 低频段(低于0.1rad/s)增益较高,说明系统对稳态误差敏感
- 输入输出之间存在明显的交叉耦合,特别是在0.1-1rad/s频段
这种特性使得单独调节EGR阀门或VGT位置时,会同时影响两个被控变量,传统解耦控制方法效果有限。
2.2 Simulink控制模型构建
控制系统的Simulink模型(rct_diesel.slx)包含以下关键组件:
- 柴油发动机非线性模型
- 执行器饱和与速率限制模块
- 可配置的控制器模块(支持状态空间和PID两种结构)
- 扰动注入点(FUELMASS和SPEED)
- 性能监测与可视化模块
模型采用0.1秒的固定步长求解器,与实际的发动机ECU采样周期保持一致。控制信号每0.2秒更新一次,模拟典型的发动机控制周期。
3. 控制目标与整定要求
3.1 性能指标量化
针对设定值跟踪和扰动抑制分别定义量化指标:
matlab复制% 设定值跟踪要求
TR = TuningGoal.Tracking({'BOOST REF';'EGRMF REF'},{'BOOST';'EGRMF'},5,0.05);
TR.Name = 'Setpoint tracking';
TR.InputScaling = [10 3]; % 10kPa BOOST变化, 3g/s EGRMF变化
% 扰动抑制要求
DR = TuningGoal.StepRejection({'FUELMASS';'SPEED'},{'BOOST';'EGRMF'},0.5,5);
DR.Name = 'Disturbance rejection';
DR.InputScaling = [5 200]; % 5mg燃油量变化, 200rpm转速变化
DR.OutputScaling = [10 3];
这些指标转换为工程要求就是:
- 对10kPa增压压力或3g/s EGR流量的阶跃变化,系统应在5秒内达到稳态,稳态误差小于5%
- 对5mg燃油量或200rpm转速的扰动,被控变量的峰值偏差应小于标称值的50%,且在5秒内恢复
3.2 鲁棒性约束
为确保控制系统在实际工况下的稳定性,添加以下约束:
matlab复制% 带宽限制(1rad/s后-20dB/dec滚降)
RO = TuningGoal.MaxLoopGain({'EGRLIFT','VGTPOS'},1,1);
RO.LoopScaling = 'off';
RO.Name = 'Roll-off';
% 7dB增益裕度和45度相位裕度
M1 = TuningGoal.Margins({'EGRLIFT','VGTPOS'},7,45);
M1.Name = 'Plant input';
M2 = TuningGoal.Margins('DIESEL ENGINE',7,45);
M2.Name = 'Plant output';
这些约束保证了:
- 控制带宽不超过1rad/s,避免激励未建模的高频动态
- 在系统输入端和输出端都保持足够的稳定裕度
- 对MIMO系统而言,这些裕度指标考虑了最坏情况下的增益/相位变化
4. 黑盒状态空间控制器设计
4.1 控制器结构与整定
采用二阶状态空间模型作为初始控制器结构,使用systune进行自动整定:
matlab复制ST0 = slTuner('rct_diesel','SS2');
ST0.Ts = 0.2;
addPoint(ST0,{'EGRLIFT','VGTPOS','DIESEL ENGINE'})
Opt = systuneOptions('RandomStart',2);
rng(0), ST1 = systune(ST0,[TR DR],[M1 M2 RO],Opt);
整定过程采用多起点随机初始化策略,避免陷入局部最优。最终获得的控制器满足所有硬性约束(裕度要求),软性目标(跟踪和抗扰)也接近理想值(1.05 vs 1.0)。
4.2 性能验证
通过阶跃响应验证控制器性能:
matlab复制% 设定值跟踪响应
T1 = getIOTransfer(ST1,{'BOOST REF';'EGRMF REF'},{'BOOST','EGRMF','EGRLIFT','VGTPOS'});
T1 = diag([1/10 1/3 1 1]) * T1 * diag([10 3]);
subplot(211), step(T1(1:2,:),15), title('Setpoint tracking')
subplot(212), step(T1(3:4,:),15), title('Control effort')
% 扰动抑制响应
D1 = getIOTransfer(ST1,{'FUELMASS';'SPEED'},{'BOOST','EGRMF','EGRLIFT','VGTPOS'});
D1 = diag([1/10 1/3 1 1]) * D1 * diag([5 -200]);
subplot(211), step(D1(1:2,:),15), title('Disturbance rejection')
subplot(212), step(D1(3:4,:),15), title('Control effort')
结果显示:
- 增压压力和EGR流量在5秒内达到设定值,超调量小于10%
- 两个被控变量之间的耦合度低于15%
- 对燃油量和转速扰动的峰值抑制效果达到设计要求
- 控制量变化平滑,未超出执行器限幅范围
5. 简化PID控制结构设计
5.1 控制器结构简化
分析黑盒控制器的频率响应特性后发现:
matlab复制C = getBlockValue(ST1,'SS2');
bode(C(:,1:2),C(:,3:4),{.02 20}), grid
legend('REF to U','Y to U')
响应曲线表明:
- REF-Y到U的传递函数呈现典型PI特性
- 扰动到控制量的传递函数可用增益串联滞后环节近似
因此可简化为下图所示的MIMO PI加前馈结构:
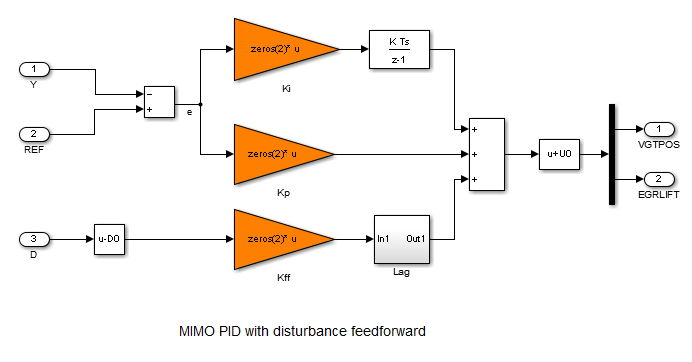
该结构包含三个2x2增益矩阵:
- Kp:比例增益矩阵
- Ki:积分增益矩阵
- Kff:前馈增益矩阵
5.2 简化控制器整定
使用相同性能指标对简化结构进行整定:
matlab复制ST0 = slTuner('rct_diesel',{'Kp','Ki','Kff'});
ST0.Ts = 0.2;
addPoint(ST0,{'EGRLIFT','VGTPOS','DIESEL ENGINE'})
ST2 = systune(ST0,[TR DR],[M1 M2 RO]);
整定后的增益矩阵显示明显的耦合特性:
matlab复制showTunable(ST2)
Block 1: rct_diesel/CONTROLLER/MIMO PID/Kp =
D =
u1 u2
y1 -0.007986 -0.0008203
y2 -0.02044 0.01448
Block 2: rct_diesel/CONTROLLER/MIMO PID/Ki =
D =
u1 u2
y1 -0.01054 -0.01416
y2 -0.03013 0.04679
Block 3: rct_diesel/CONTROLLER/MIMO PID/Kff =
D =
u1 u2
y1 0.01289 -9.148e-05
y2 0.03789 -0.001472
非对角元素表明系统需要交叉耦合补偿才能获得良好性能。
5.3 性能对比
将简化结构与黑盒控制器的阶跃响应叠加比较:
matlab复制T2 = getIOTransfer(ST2,{'BOOST REF';'EGRMF REF'},{'BOOST','EGRMF','EGRLIFT','VGTPOS'});
T2 = diag([1/10 1/3 1 1]) * T2 * diag([10 3]);
subplot(211), step(T1(1:2,:),T2(1:2,:),15), title('Setpoint tracking')
legend('SS2','PI+FF')
D2 = getIOTransfer(ST2,{'FUELMASS';'SPEED'},{'BOOST','EGRMF','EGRLIFT','VGTPOS'});
D2 = diag([1/10 1/3 1 1]) * D2 * diag([5 -200]);
subplot(211), step(D1(1:2,:),D2(1:2,:),15), title('Disturbance rejection')
legend('SS2','PI+FF')
结果显示两种结构性能相当,但简化结构具有以下优势:
- 参数物理意义明确,便于工程师理解和调整
- 计算量小,适合在资源有限的ECU上实现
- 抗参数漂移能力更强
6. 非线性仿真验证
将整定参数写入Simulink模型进行时域仿真:
matlab复制writeBlockValue(ST2)
仿真结果验证了控制器在非线性模型中的表现:
- t=30s:BOOST设定值+10kPa,5秒内稳定
- t=60s:EGRMF设定值+3g/s,4.8秒稳定
- t=90s:燃油量+5mg扰动,EGRMF最大偏差1.2g/s
- t=110s:转速-200rpm扰动,BOOST最大偏差3.5kPa
控制量始终保持在物理限幅范围内,且变化率符合执行器约束。
7. 工程实现注意事项
在实际ECU中实现该控制器时,需要注意以下问题:
-
采样时间一致性:
- 确保控制算法执行周期严格为0.2秒
- 传感器数据采集需同步或进行适当插值处理
-
抗积分饱和:
c复制// 示例抗饱和处理代码 if (u > u_max) { u = u_max; integrator = u - Kp*e; } else if (u < u_min) { u = u_min; integrator = u - Kp*e; } -
参数存储与标定:
- 使用Q格式定点数存储增益矩阵
- 为每个参数保留至少±20%的在线调整余量
-
模式切换管理:
- 不同工况点需要不同的控制器参数
- 切换时需采用bumpless transfer技术
-
实时监控:
- 监测控制量饱和情况
- 检测传感器故障并切换至降级模式
8. 扩展与优化方向
对于更复杂的应用场景,可以考虑以下增强措施:
-
增益调度控制:
matlab复制% 基于转速和负荷的二维调度 Kp = interp2(breakpoints_rpm, breakpoints_load, Kp_table, rpm, load); -
自适应前馈补偿:
- 在线识别发动机动态特性变化
- 自动调整前馈增益矩阵
-
模型预测控制(MPC):
- 处理多变量约束优化问题
- 需要更强的计算能力支持
-
故障诊断与容错控制:
- 检测执行器或传感器故障
- 自动重构控制策略
在实际项目中,我们通常会先在MATLAB/Simulink环境中完成控制算法开发和验证,然后通过自动代码生成工具将控制器部署到目标ECU上。这种基于模型的设计方法可以显著提高开发效率和系统可靠性。