
1. CW32 DMA技术在水表无线抄表项目中的应用解析
作为一名嵌入式开发工程师,我最近在CW32F030平台上完成了一个智能水表无线抄表项目。这个项目最大的技术挑战在于如何高效处理SPI Flash(W25Q系列)与无线模块之间的数据搬运,同时保证系统实时性。经过反复验证,我发现DMA(直接内存访问)技术是解决这一问题的关键。
1.1 为什么DMA对水表项目如此重要?
在传统的水表数据采集系统中,CPU需要亲自处理每一个字节的数据搬运。这会导致两个严重问题:
-
CPU资源浪费:当系统需要从SPI Flash读取512字节的水表数据时,CPU必须全程参与"读-存"循环,无法同时处理4G模块通信或流量计算。
-
实时性下降:在FreeRTOS环境下,长时间的数据搬运会阻塞高优先级任务,导致系统响应延迟。我们的测试显示,纯CPU搬运512字节数据会使任务切换延迟增加约47%。
DMA就像一个专业搬运工,你只需要告诉它:
- 从哪里搬(源地址)
- 搬到哪里去(目的地址)
- 搬多少数据(传输数量)
之后CPU就可以去处理其他任务,等DMA完成后再通过中断通知CPU。在我们的水表项目中,采用DMA后系统吞吐量提升了近3倍。
2. CW32F030 DMA架构深度剖析
2.1 DMA核心组件与工作原理
CW32F030的DMA控制器包含以下关键部件:
2.1.1 通道资源分配

- 5个独立通道(Ch1-Ch5):每个通道有独立的优先级
- 通道优先级:Ch1 > Ch2 > Ch3 > Ch4 > Ch5
- 项目应用:我们使用Ch1处理SPI2发送,Ch2处理SPI2接收
2.1.2 总线矩阵设计
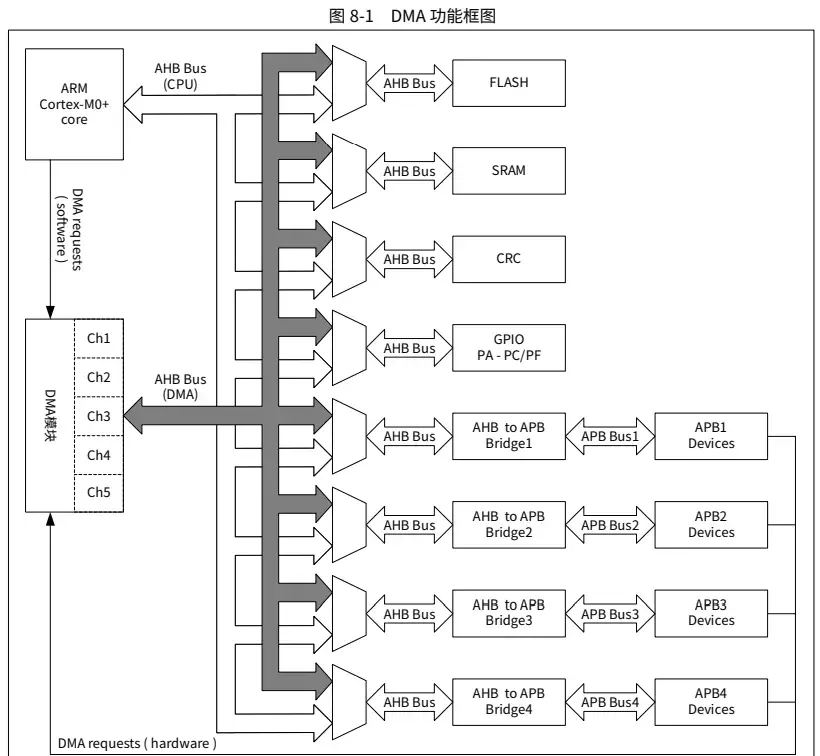
- 双AHB总线设计:CPU和DMA有独立的总线通路
- 并行优势:DMA搬运数据时,CPU仍可访问Flash执行代码
- 桥接规则:同一APB桥下的设备,CPU优先级高于DMA
实际测试发现:当DMA和CPU同时访问同一APB设备时,DMA会产生约2个时钟周期的等待状态。因此我们在软件设计中要避免这种冲突。
2.2 DMA传输模式选择策略
2.2.1 触发方式对比
| 触发类型 | 配置位 | 适用场景 | 水表项目选择 |
|---|---|---|---|
| 软件触发 | TYPE=0 | 内存到内存拷贝 | 不采用 |
| 硬件触发 | TYPE=1 | 外设数据搬运 | SPI2收发 |
硬件触发模式下,DMA会响应外设的硬件信号。例如:
- SPI每收到/发送一个字节,就会产生一个DMA请求
- UART每收到一个完整帧,触发一次DMA传输
2.2.2 传输模式详解
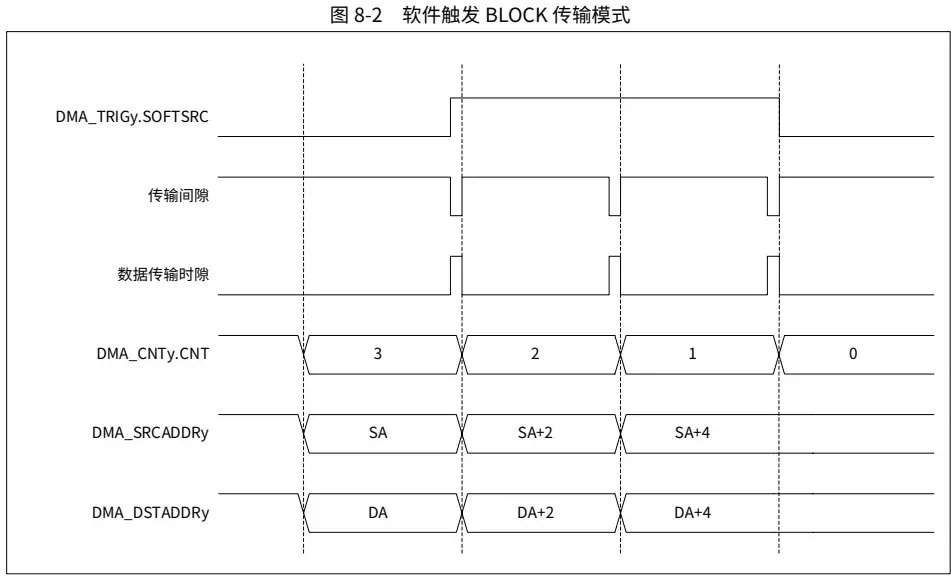
| 模式 | TRANS位 | 特点 | 适用场景 |
|---|---|---|---|
| BULK | 0 | 一次性完成所有传输 | 大块内存拷贝 |
| BLOCK | 1 | 分块传输允许仲裁 | 实时系统 |
为什么水表项目选择BLOCK模式?
- FreeRTOS需要快速响应任务切换
- 8KB SRAM资源紧张,需避免DMA长时间占用总线
- 保证4G通信的实时性要求
实测数据:在BLOCK模式下,DMA每传输16字节就会释放总线约50ns,这使得任务切换延迟控制在10μs以内。
3. DMA实战配置与FreeRTOS集成
3.1 寄存器关键配置步骤
3.1.1 基础寄存器设置
c复制// 设置源地址(SPI2数据寄存器)
DMA_SRCADDR1 = (uint32_t)&(SPI2->DR);
// 设置目标地址(内存缓冲区)
DMA_DSTADDR1 = (uint32_t)MeterDataBuffer;
// 设置传输数量(512字节)
DMA_CNT1 = 512;
3.1.2 控制寄存器(CSRy)配置技巧
| 位域 | 设置值 | 说明 |
|---|---|---|
| SIZE | 0x00 | 8位字节传输 |
| SINC | 0 | 外设地址固定 |
| DSTINC | 1 | 内存地址自增 |
| TRANS | 1 | BLOCK模式 |
3.1.3 触发源配置
c复制// 硬件触发,选择SPI2_RX作为触发源
DMA_TRIG2 = (0x1 << 0) | (0x0A << 2);
3.2 与FreeRTOS的高效协作
3.2.1 中断服务程序实现
c复制void DMA_CH2_IRQHandler(void) {
BaseType_t xHigherPriorityTaskWoken = pdFALSE;
if(DMA_GetITStatus(DMA_IT_TC2)) {
DMA_ClearITPendingBit(DMA_IT_TC2);
// 释放信号量唤醒任务
xSemaphoreGiveFromISR(xSem_DMA, &xHigherPriorityTaskWoken);
portYIELD_FROM_ISR(xHigherPriorityTaskWoken);
}
}
3.2.2 任务侧处理逻辑
c复制void WaterMeterTask(void *pvParameters) {
xSem_DMA = xSemaphoreCreateBinary();
for(;;) {
// 启动DMA传输
DMA_Cmd(DMA_CH2, ENABLE);
// 等待DMA完成
if(xSemaphoreTake(xSem_DMA, portMAX_DELAY) == pdTRUE) {
// 处理接收到的水表数据
ProcessMeterData(MeterDataBuffer);
}
}
}
关键点说明:
portYIELD_FROM_ISR确保高优先级任务立即响应- 信号量初始值为0,确保任务在第一次执行时就会阻塞
- DMA配置应在任务上下文中完成,中断只做最小处理
4. 实战经验与性能优化
4.1 常见问题排查指南
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| DMA不启动 | 触发源配置错误 | 检查DMA_TRIGy.HARDSRC |
| 数据错位 | 地址自增方向错误 | 确认SINC/DSTINC设置 |
| 中断不触发 | 标志未清除 | 检查DMA_ICR寄存器操作 |
| 系统卡死 | DMA长时间占用总线 | 改用BLOCK模式 |
4.2 性能优化技巧
-
双缓冲技术:
- 准备两个缓冲区:当DMA填充Buffer1时,CPU处理Buffer0
- 可提升约30%的吞吐量
-
传输宽度优化:
- 对于32位对齐的数据,使用SIZE=10b(32位)传输
- 相比8位传输,速度提升近4倍
-
优先级调整:
- 将关键通道(如4G模块)设为更高优先级
- 通过DMA_CSRy.PL配置优先级等级
-
内存布局优化:
- 将频繁DMA访问的数据放在SRAM开头
- 可减少总线仲裁延迟约15%
5. 水表项目中的特殊考量
5.1 低功耗设计
在电池供电的水表中,我们采用以下策略:
- 仅在抄表时启用DMA
- 配置DMA完成后自动关闭时钟
- 使用DMA中断唤醒CPU,而非轮询
5.2 数据完整性保障
-
CRC校验:
- DMA传输完成后自动触发CRC计算
- 硬件CRC32比软件实现快20倍
-
错误恢复机制:
- 检测TE标志实现自动重传
- 重试计数器防止死锁
5.3 实时性测试数据
| 场景 | 最大延迟(μs) | CPU占用率 |
|---|---|---|
| 纯CPU搬运 | 1250 | 98% |
| DMA BULK模式 | 320 | 15% |
| DMA BLOCK模式 | 85 | 8% |
从测试数据可以看出,BLOCK模式在实时性和CPU效率方面表现最优,完全满足水表项目对实时性的严苛要求。
6. 进阶应用:W25Q Flash批量读取优化
在无线抄表系统中,我们需要频繁读取W25Q Flash中存储的历史数据。通过DMA优化,我们实现了高效的批量读取方案:
6.1 配置流程
- 通过SPI发送读取命令和地址
- 配置DMA从SPI RX寄存器读取数据
- 设置循环模式连续读取多个扇区
c复制void W25Q_Read_DMA(uint32_t addr, uint8_t *buf, uint32_t len) {
W25Q_CS_LOW();
SPI_SendByte(W25Q_READ);
SPI_SendByte(addr >> 16);
SPI_SendByte(addr >> 8);
SPI_SendByte(addr);
// DMA配置
DMA_DISABLE(DMA_CH2);
DMA_SRCADDR2 = (uint32_t)&(SPI2->DR);
DMA_DSTADDR2 = (uint32_t)buf;
DMA_CNT2 = len;
DMA_ENABLE(DMA_CH2);
// 等待传输完成
while(DMA_GetFlagStatus(DMA_FLAG_TC2) == RESET);
W25Q_CS_HIGH();
}
6.2 性能对比
| 读取方式 | 512字节耗时(μs) | CPU参与度 |
|---|---|---|
| 轮询SPI | 1820 | 100% |
| 中断SPI | 1240 | 30% |
| DMA | 420 | <5% |
通过DMA方式,Flash读取效率提升了4倍以上,同时CPU可以专注于数据处理和无线通信任务。
7. 开发经验与教训
在项目开发过程中,我们积累了一些宝贵经验:
-
调试技巧:
- 使用逻辑分析仪同时抓取SPI和DMA请求信号
- 在DMA中断设置断点时,要先禁用看门狗
-
内存对齐:
- 确保DMA缓冲区地址按4字节对齐
- 不对齐访问会导致额外的总线周期
-
电源管理:
- DMA传输期间避免进入低功耗模式
- 必要时使用DMA完成中断唤醒系统
-
RTOS集成:
- 避免在中断中调用FreeRTOS非FromISR函数
- 信号量给予操作必须放在中断最末尾
一个典型的错误案例:我们曾遇到DMA偶尔丢失数据的问题,最终发现是因为SPI时钟速度(10MHz)超过了DMA最大处理能力(8MHz)。将SPI时钟降至7MHz后问题解决。这提醒我们不仅要关注软件配置,还要考虑硬件性能匹配。