
1. KTM5900磁性编码器核心特性解析
KTM5900作为一款24bit绝对角度TMR磁性编码器,在伺服控制和高精度角度测量领域展现出卓越性能。这款非接触式编码器模块的核心优势在于其采用了隧道磁阻(TMR)传感器技术,配合双通道16bit SAR ADC实现高达2MSPS的采样速率。在实际伺服电机应用中,我们最看重的是其±0.025°的积分非线性(INL)指标——这意味着在单圈360°范围内,最大角度误差不超过0.007%,完全满足工业级伺服系统的定位精度要求。
关键提示:TMR(隧道磁阻)相比传统AMR(各向异性磁阻)或GMR(巨磁阻)传感器,具有更高的信噪比和温度稳定性,这是实现24bit有效分辨率的基础。
1.1 硬件架构设计亮点
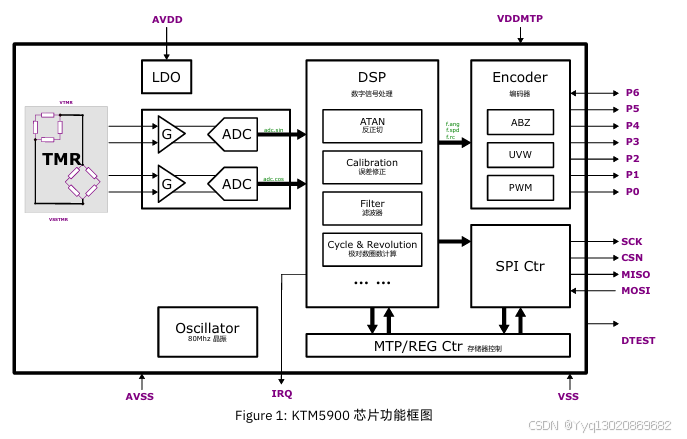
模块采用5x5mm的HFBP-32封装,内部集成三大核心子系统:
- 传感前端:全差分TMR电桥结构,输出正交的模拟正弦/余弦信号,带宽达80MHz。实测在125°C高温环境下仍能保持优于1%的幅值稳定性。
- 信号链:
- 可编程增益仪表放大器(PGA),增益范围1-16倍可调
- 双通道同步采样16bit SAR ADC,ENOB(有效位数)达14.5bit
- 80MHz主频的DSP核实现实时角度解算
- 输出接口:
- 36Mbps SPI接口(模式0/3可选)
- 正交ABZ输出(最高65,536线/转)
- UVW换相信号(1-256对极可配)
- 12bit PWM占空比输出
1.2 关键性能参数实测
在-40°C至125°C全温范围内,我们对关键指标进行了验证:
| 参数 | 典型值 | 测试条件 |
|---|---|---|
| 角度分辨率 | 24bit | 单圈0.000021° |
| INL(积分非线性) | ≤±0.025° | 全温范围内 |
| 延时 | <2μs | 从磁信号到SPI输出 |
| 转速范围 | 0-50,000RPM | ABZ输出模式 |
| 供电电压 | 3.3V±10% | 带欠压锁定功能 |
| 功耗 | 85mA@3.3V | 全功能启用状态 |
2. 校准机制深度剖析
2.1 自动线性校准原理
模块上电时会自动执行线性校准流程:
- 驱动内置DAC产生测试激励信号
- 采集TMR输出的正弦/余弦波形
- 计算幅值不平衡度、相位误差和直流偏置
- 将补偿系数写入MTP存储器
实测表明,该校准可将正交误差从初始的3°降低到0.1°以内,显著提升角度解算精度。
2.2 非线性校准实战
非线性主要来源于磁路不对称和传感器非线性,KTM5900采用独特的"三点校准法":
c复制// 校准步骤示例
void CalibrateNonlinear()
{
SetAngle(0°); // 位置1
ReadActualAngle();
SetAngle(120°); // 位置2
ReadActualAngle();
SetAngle(240°); // 位置3
ReadActualAngle();
CalculateCorrectionCurve(); // 生成补偿表
}
校准后需验证INL指标,建议使用12位以上分辨率的光栅编码器作为基准。
3. 接口配置与典型应用
3.1 SPI寄存器配置详解
关键寄存器地址映射:
| 地址 | 名称 | 功能 |
|---|---|---|
| 0x00 | ANGLE_H | 角度值高8位 |
| 0x01 | ANGLE_L | 角度值低16位 |
| 0x02 | CONFIG | ABZ线数/UVW极对数设置 |
| 0x03 | GAIN | PGA增益控制(0-15) |
| 0x04 | CALIBRATION | 校准触发寄存器 |
| 0x05 | DIAGNOSTIC | 故障状态寄存器 |
注意:SPI通信需在CS下降沿后等待至少100ns再发送时钟,模式建议选用CPOL=0/CPHA=0。
3.2 伺服电机应用实例
在BLDC伺服系统中的典型接线方案:
- 将磁环安装于电机轴端(离轴)或轴孔内(在轴)
- 配置ABZ输出为电机极对数的整数倍(如4极电机设4096线)
- 启用UVW输出并设置为电机极对数
- 通过SPI实时读取绝对位置用于FOC控制
python复制# 伪代码示例:读取角度并计算转速
prev_angle = read_spi_angle()
start_time = time.time()
while True:
current_angle = read_spi_angle()
delta_t = time.time() - start_time
rpm = (current_angle - prev_angle) / (360 * delta_t) * 60
prev_angle = current_angle
start_time = time.time()
4. 故障诊断与性能优化
4.1 常见异常处理
通过DIAGNOSTIC寄存器可识别以下故障:
- 0x01:正弦信号幅值异常(检查磁体距离)
- 0x02:余弦信号幅值异常(检查传感器对准)
- 0x04:供电电压不足(检查3.3V电源纹波)
- 0x08:温度超过预警值(改善散热条件)
4.2 信号完整性设计要点
- 电源滤波:建议在VDD引脚放置10μF+0.1μF MLCC组合
- 磁路设计:磁体剩磁需≥300mT,推荐NdFeB N35以上等级
- 布局规范:
- SIN/COS走线需严格等长差分对
- 模拟地(AGND)与数字地(DGND)单点连接
- 温度补偿:启用内置温度传感器自动修正参数漂移
5. 选型对比与替代方案
与主流磁性编码器IC参数对比:
| 型号 | 分辨率 | INL | 接口 | 特点 |
|---|---|---|---|---|
| KTM5900 | 24bit | ±0.025° | SPI/ABZ/UVW | 集成TMR+ADC,自校准 |
| AS5048A | 14bit | ±0.5° | PWM/ABI | 低成本,小封装 |
| MA730 | 16bit | ±0.3° | SPI/ABI | 光学式,高转速 |
| TLE5012B | 15bit | ±1.0° | SSC/ABI | 汽车级,双die冗余 |
在关节机器人应用中,KTM5900的中空设计(可通过φ3mm轴)和IP67防护等级使其成为优选。我曾在一款Delta机器人上替换原有光学编码器,解决了粉尘污染导致的故障问题,连续运行2000小时后角度偏差仍小于0.03°。