
1. 欧姆龙Sysmac Studio伺服控制模块化设计实战
在工业自动化领域,伺服控制系统的可靠性和可维护性直接影响产线效率。最近我在一个包装产线升级项目中,使用欧姆龙NJ101-1000控制器搭配R88D-KN01H伺服驱动器,通过Sysmac Studio平台开发了一套模块化的伺服控制程序。这套方案最大的特点是将多模式控制功能封装成可复用的功能块,实现了"单一职责原则"下的高内聚设计。
1.1 硬件配置与功能需求
项目采用的硬件组合是典型的欧姆龙EtherCAT总线方案:
- 主控:NJ101-1000 CPU模块
- 驱动:R88D-KN01H 1kW伺服驱动器
- 电机:R88M-K系列伺服电机
- 反馈系统:17位绝对值编码器
- 传感器配置:前/后极限开关(NPN常闭型)、原点传感器(光电式)
系统需要实现五种核心功能:
- 伺服使能与故障复位
- 点动控制(正转/反转)
- 原点回归(带两段速搜索)
- 绝对位置定位
- 运行状态监控与互锁
1.2 软件架构设计
在Sysmac Studio中采用分层设计:
- 底层:轴参数配置(单位换算、软限位、增益调节)
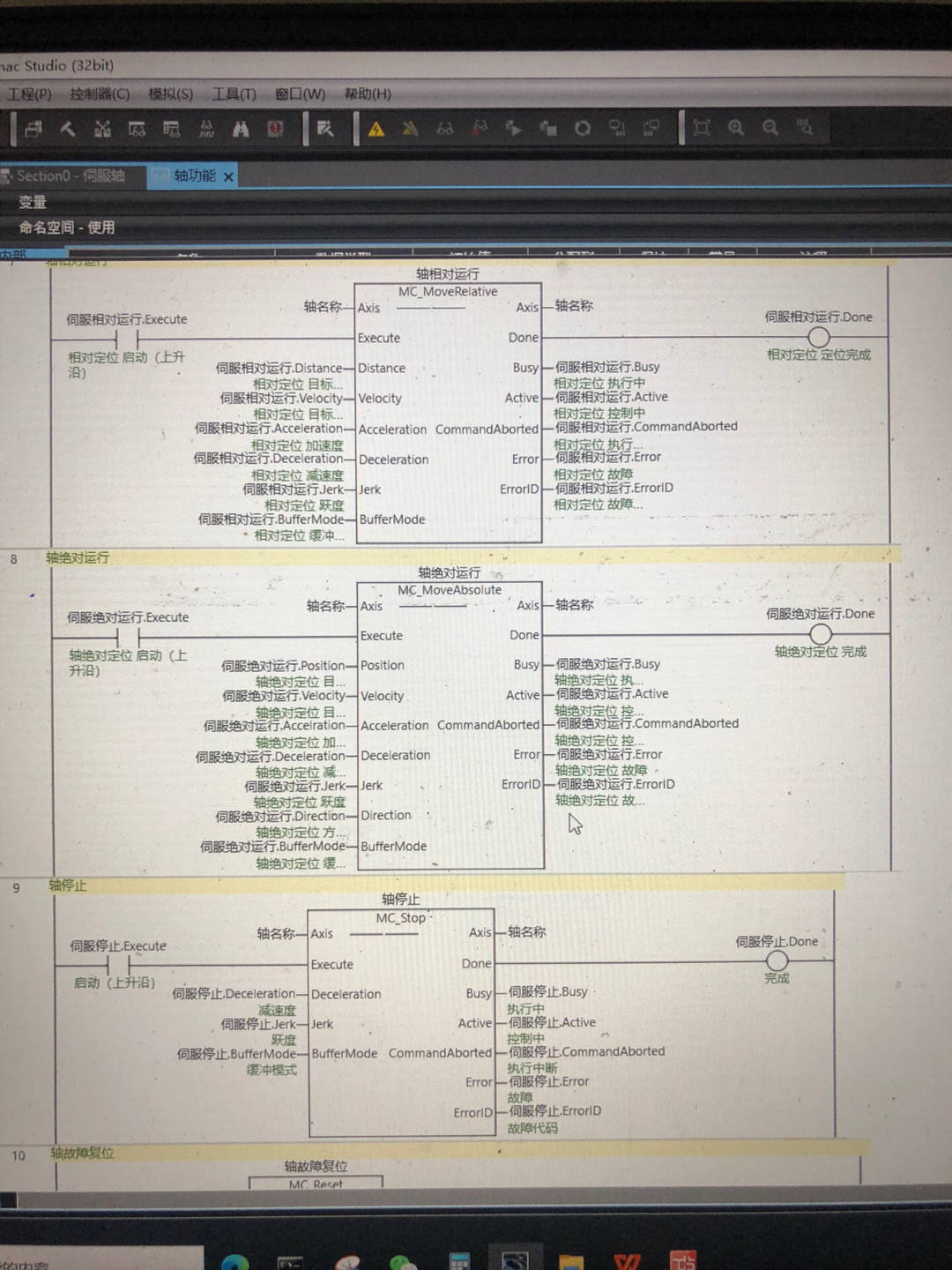
- 中间层:功能块封装(MC指令包装)
- 应用层:工艺逻辑调用
特别将速度参数统一封装为结构体:
st复制TYPE ST_SpeedProfile :
STRUCT
JogSpeed : LREAL := 200.0; // 点动基准速度(mm/s)
HomeFast : LREAL := 300.0; // 原点搜索高速段
HomeSlow : LREAL := 50.0; // 原点搜索低速段
AbsSpeed : LREAL := 150.0; // 定位运动速度
AccTime : LREAL := 100.0; // 加速时间(ms)
DecTime : LREAL := 100.0; // 减速时间(ms)
END_STRUCT
END_TYPE
2. 核心功能实现细节
2.1 伺服使能安全逻辑
伺服使能不是简单的通断控制,需要考虑安全联锁:
st复制// 安全使能逻辑
IF bSysReady AND NOT bEmergency THEN
MC_Power(
Axis:=Axis1,
Enable:=TRUE,
Status=>stPowerStatus,
Error=>errPower,
ErrorID=>errPowerID);
// 使能延迟检测
tonEnableDelay(IN:=stPowerStatus.Enable, PT:=T#500ms);
bEnabled := tonEnableDelay.Q;
ELSE
MC_Power(Axis:=Axis1, Enable:=FALSE);
tonEnableDelay(IN:=FALSE);
bEnabled := FALSE;
END_IF
// 故障复位需先断使能
IF bReset AND errPower THEN
MC_Power(Axis:=Axis1, Enable:=FALSE);
tonResetDelay(IN:=TRUE, PT:=T#200ms);
IF tonResetDelay.Q THEN
MC_Reset(Axis:=Axis1, Execute:=TRUE);
END_IF
END_IF
关键点:使能信号加入500ms延时确认,避免瞬间状态抖动导致误判。复位操作必须先断开使能,200ms后再执行复位指令。
2.2 点动控制实现
点动控制需要处理速度斜坡和方向互锁:
st复制// 点动速度斜坡生成
rJogSpeed := REAL_TO_LREAL(
LIMIT(
MIN := 0,
MAX := stSpeed.JogSpeed,
IN := rJogSpeed + (bJogFwd OR bJogRev ? 10.0 : -20.0)));
// 方向控制
IF bJogFwd AND NOT bBusy THEN
MC_MoveVelocity(
Axis:=Axis1,
Execute:=TRUE,
Velocity:=rJogSpeed,
Acceleration:=stSpeed.AccTime,
Deceleration:=stSpeed.DecTime);
bBusy := TRUE;
eDir := DIR_FWD;
END_IF
// 停止条件判断
IF (eDir = DIR_FWD AND NOT bJogFwd) OR
(eDir = DIR_REV AND NOT bJogRev) THEN
MC_Stop(
Axis:=Axis1,
Execute:=TRUE,
Deceleration:=stSpeed.DecTime);
bBusy := FALSE;
END_IF
速度斜坡通过LIMIT函数实现平滑加减速,避免机械冲击。方向状态机确保正反转切换时先完全停止。
3. 原点回归精度的提升方案
3.1 两段式搜索算法优化
原始方案存在过冲问题,改进后的状态机:
st复制CASE nHomeState OF
0: // 待机状态
IF bHomeStart AND NOT bBusy THEN
nHomeState := 1;
END_IF
1: // 第一阶段:高速向负向运动
MC_MoveVelocity(
Axis:=Axis1,
Execute:=TRUE,
Velocity:=-stSpeed.HomeFast,
Acceleration:=stSpeed.AccTime,
Deceleration:=stSpeed.DecTime);
nHomeState := 2;
2: // 检测到后极限或原点信号
IF bRearLimit OR bOrigin THEN
MC_Stop(Axis:=Axis1, Execute:=TRUE);
tonDelay(IN:=TRUE, PT:=T#300ms);
nHomeState := 3;
END_IF
3: // 第二阶段:低速正向运动
IF tonDelay.Q THEN
MC_MoveVelocity(
Axis:=Axis1,
Execute:=TRUE,
Velocity:=stSpeed.HomeSlow,
Acceleration:=stSpeed.AccTime,
Deceleration:=stSpeed.DecTime);
nHomeState := 4;
END_IF
4: // 原点信号下降沿停止
IF NOT bOrigin AND xOriginLast THEN
MC_Stop(Axis:=Axis1, Execute:=TRUE);
Axis1.CommandPos := 0;
Axis1.ActPos := 0;
bHomeOK := TRUE;
nHomeState := 0;
END_IF
xOriginLast := bOrigin;
END_CASE
改进点:
- 增加300ms停止延时,消除机械振动影响
- 采用速度模式替代MC_Home指令,响应更快
- 同时清零CommandPos和ActPos,避免位置偏差
3.2 传感器安装建议
- 原点传感器安装在机械原点偏负向5-10mm处
- 后极限距离机械硬限位保留20mm缓冲距离
- 前极限建议使用驱动器侧的软件限位替代
4. 绝对定位的安全互锁机制
4.1 条件判断逻辑
st复制// 定位使能条件
bAbsReady := bEnabled AND bHomeOK AND NOT bBusy
AND (nTargetPos >= rSoftLimit.Negative)
AND (nTargetPos <= rSoftLimit.Positive);
// 定位执行
IF bAbsStart AND bAbsReady THEN
MC_MoveAbsolute(
Axis:=Axis1,
Execute:=TRUE,
Position:=nTargetPos,
Velocity:=stSpeed.AbsSpeed,
Acceleration:=stSpeed.AccTime,
Deceleration:=stSpeed.DecTime);
// 超时监控
tonAbsTimeout(IN:=TRUE, PT:=T#10s);
END_IF
// 完成判断
IF MC_MoveAbsolute.Done OR MC_MoveAbsolute.Error THEN
tonAbsTimeout(IN:=FALSE);
bAbsDone := TRUE;
END_IF
关键保护措施:
- 软限位双重校验
- 10秒运动超时监控
- 原点状态连锁
4.2 位置校验算法
在每次定位完成后增加位置校验:
st复制rPosError := ABS(Axis1.ActPos - nTargetPos);
IF rPosError > rTolerance THEN
AlarmCode := 16#2001; // 定位超差报警
MC_Stop(Axis:=Axis1, Execute:=TRUE);
END_IF
公差值rTolerance建议设为编码器分辨率的3倍,例如1μm级系统设为0.003mm。
5. 现场调试经验总结
5.1 常见问题排查表
| 故障现象 | 可能原因 | 解决方案 |
|---|---|---|
| 使能失败 | 1. EtherCAT通信异常 2. 驱动器报警 3. 安全回路断开 |
1. 检查网线连接 2. 查看驱动器显示代码 3. 测量安全信号电压 |
| 原点回归过冲 | 1. 减速时间设置过短 2. 传感器响应延迟 3. 惯性参数不匹配 |
1. 增加DecTime参数 2. 改用更快响应传感器 3. 重新进行惯量辨识 |
| 定位抖动 | 1. 机械刚性不足 2. PID增益过高 3. 传动部件磨损 |
1. 增加机械支撑 2. 降低比例增益 3. 检查联轴器/导轨 |
5.2 参数优化心得
- 速度环比例增益:初始值设为电机额定转速的1/100(如3000rpm电机设30)
- 位置环带宽:通常设为速度环的1/5-1/10
- 惯量比识别:通过Sysmac的Auto Tuning功能自动测量
- 摩擦补偿:在低速(10rpm以下)时特别重要
实际调试中发现,当负载惯量比超过10:1时,需要启用双闭环控制(位置环+速度环)才能获得稳定性能。
这套模块化程序经过三个月的产线验证,平均定位精度保持在±0.02mm以内,原点重复精度达到±0.005mm。最大的收获是将工艺参数与控制逻辑彻底分离,不同设备只需调整速度结构体参数即可适配,真正实现了"单一职责原则"的工程实践。