
1. 项目概述与设计思路
作为一名嵌入式开发工程师,我最近完成了一个基于STM32的健身自行车数据采集系统。这个项目的核心目标是通过传感器实时采集健身自行车的运动数据和环境参数,让使用者在锻炼时能够直观了解自己的运动状态和周围环境情况。
1.1 系统核心功能解析
这个数据采集系统主要实现三大功能模块:
- 运动数据采集:通过霍尔传感器检测自行车转速,结合电流传感器获取运动强度
- 环境监测:使用DHT11温湿度传感器实时监测锻炼环境
- 人机交互:通过OLED显示屏展示数据,异常时触发声光报警
提示:在设计这类实时数据采集系统时,最关键的是确保各传感器模块的采样频率与主控芯片的处理能力相匹配,避免数据丢失或系统卡顿。
1.2 为什么选择STM32F407
在控制器选型上,我最终选择了STM32F407ZGT6这款芯片,主要基于以下几点考虑:
- 性能需求:系统需要同时处理多个传感器数据并实时显示,STM32F4系列的168MHz主频和ART加速器能很好满足
- 外设资源:芯片内置12位ADC、多个定时器和丰富GPIO,正好匹配我们的传感器接口需求
- 开发便利:STM32生态系统成熟,有完善的开发工具链和社区支持
- 成本控制:相比高端处理器,STM32在满足需求的前提下更具性价比
在实际开发中,STM32F4的DMA控制器特别有用,它可以在CPU不干预的情况下完成传感器数据到内存的传输,大大提高了系统效率。
2. 硬件系统设计与模块选型
2.1 总体硬件架构设计
系统硬件架构采用模块化设计思想,各功能模块通过标准接口与主控芯片连接。这种设计有以下优势:
- 各模块可以独立开发和测试
- 出现问题易于定位和更换
- 便于后续功能扩展
2.2 关键模块选型分析
2.2.1 显示模块选型对比
在显示模块的选择上,我对比了三种常见方案:
| 显示类型 | 优点 | 缺点 | 适用场景 | 最终选择 |
|---|---|---|---|---|
| LED数码管 | 成本低、功耗低 | 显示内容有限 | 简单数值显示 | × |
| LCD屏幕 | 显示内容丰富 | 功耗较高、体积大 | 图形界面需求 | × |
| OLED | 高对比度、响应快 | 成本略高 | 文本和简单图形 | √ |
最终选择0.96寸OLED显示屏,主要因为:
- 显示效果清晰,适合室内健身环境观看
- 自发光特性使其在低光环境下仍可清晰显示
- 128x64分辨率足够显示运动数据和环境参数
- I2C接口节省GPIO资源
2.2.2 传感器模块选型
温湿度传感器选择:
对比了DHT11、DHT22和SHT30后,选择DHT11的原因:
- 精度满足健身环境监测需求(±2℃, ±5%RH)
- 单总线接口简化电路设计
- 成本低廉且供应稳定
- 已有成熟的驱动库支持
转速检测方案:
采用霍尔传感器+磁铁的方案:
- 在自行车飞轮安装磁铁
- 固定位置安装霍尔传感器
- 通过检测磁场变化计算转速
- 成本低且安装灵活
2.3 硬件连接细节
2.3.1 STM32最小系统设计
STM32F407最小系统包括:
- 主芯片:STM32F407ZGT6
- 时钟电路:8MHz晶振+32.768kHz RTC晶振
- 复位电路:10k上拉电阻+100nF电容
- 电源电路:3.3V LDO稳压器
- 调试接口:SWD四线接口
注意:STM32F4的VCAP引脚必须连接2.2μF电容到地,这是内部稳压器的滤波电容,缺少会导致芯片工作不稳定。
2.3.2 传感器接口分配
根据外设特点和PCB布局,各模块接口分配如下:
| 模块 | 接口引脚 | 选择理由 |
|---|---|---|
| DHT11 | PG9 | 附近有5V电源和地线 |
| OLED | I2C1(PB6/PB7) | 专用I2C接口,走线方便 |
| 霍尔传感器 | PA0 | 可连接TIM2_CH1,方便脉冲计数 |
| 蜂鸣器 | PF8 | 普通GPIO即可满足需求 |
| LED指示灯 | PF9/PF10 | 与蜂鸣器同一排针,布线简洁 |
3. 软件系统设计与实现
3.1 开发环境搭建
选择Keil MDK作为开发环境,具体配置步骤如下:
-
安装软件:
- Keil MDK 5.30
- STM32F4 Device Family Pack
- ST-Link驱动
-
工程配置:
- 选择STM32F407ZGTx设备
- 设置HSE_VALUE=8000000
- 优化等级-O2
- 启用MicroLIB减小代码体积
-
必备库安装:
- STM32CubeF4 HAL库
- DHT11驱动库
- OLED显示驱动库
c复制// 典型工程结构
Project/
├── CMSIS/ // 内核支持文件
├── Drivers/
│ ├── STM32F4xx_HAL_Driver/ // HAL库
│ └── BSP/ // 板级支持包
├── Middlewares/ // 中间件
├── Src/
│ ├── main.c // 主程序
│ ├── stm32f4xx_it.c // 中断服务
│ └── ... // 其他源文件
└── Inc/ // 头文件
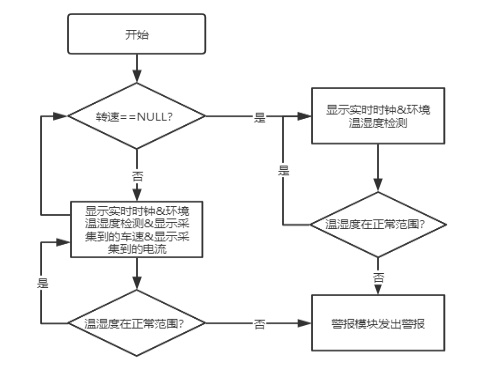
3.2 主程序流程设计
系统采用轮询+中断的混合架构:
flow复制st=>start: 系统初始化
op1=>operation: 外设初始化
(HAL库初始化、时钟配置、GPIO设置)
op2=>operation: 传感器校准
(温湿度传感器、转速传感器)
op3=>operation: 主循环
cond=>condition: 有转速信号?
io=>inputoutput: 显示运动数据
(速度、里程、卡路里)
sub=>subroutine: 显示环境数据
(温湿度、时间)
e=>end: 系统运行
st->op1->op2->op3
op3->cond
cond(yes)->io->op3
cond(no)->sub->op3
3.2.1 关键数据结构设计
c复制typedef struct {
uint8_t temp; // 温度(℃)
uint8_t humidity; // 湿度(%RH)
} EnvData;
typedef struct {
float speed; // 速度(km/h)
float distance; // 里程(km)
uint16_t cadence; // 踏频(RPM)
uint16_t calories; // 卡路里(kcal)
} BikeData;
typedef struct {
RTC_TimeTypeDef time;
RTC_DateTypeDef date;
EnvData env;
BikeData bike;
uint8_t alert; // 报警标志位
} SystemData;
3.3 传感器驱动开发
3.3.1 DHT11温湿度传感器驱动
DHT11采用单总线协议,通信时序非常关键。以下是驱动开发要点:
-
总线初始化:
- 配置PG9为开漏输出
- 上拉电阻4.7kΩ
- 总线空闲时为高电平
-
启动信号:
- 主机拉低总线≥18ms
- 然后拉高20-40μs
- 切换为输入模式等待响应
-
数据读取:
- 从机响应:拉低80μs,然后拉高80μs
- 数据位:50μs低电平后,26-28μs高电平表示"0",70μs高电平表示"1"
c复制#define DHT11_PORT GPIOG
#define DHT11_PIN GPIO_PIN_9
uint8_t DHT11_ReadData(uint8_t *temp, uint8_t *humi) {
uint8_t buf[5] = {0};
uint8_t i,j;
// 启动信号
HAL_GPIO_WritePin(DHT11_PORT, DHT11_PIN, GPIO_PIN_RESET);
HAL_Delay(20);
HAL_GPIO_WritePin(DHT11_PORT, DHT11_PIN, GPIO_PIN_SET);
delay_us(30);
// 等待响应
if(DHT11_WaitResponse(DHT11_TIMEOUT) != 0) return 1;
// 读取40位数据
for(i=0; i<5; i++) {
for(j=0; j<8; j++) {
while(!(DHT11_PORT->IDR & DHT11_PIN)); // 等待低电平结束
delay_us(40);
buf[i] <<= 1;
if(DHT11_PORT->IDR & DHT11_PIN) buf[i] |= 1;
while(DHT11_PORT->IDR & DHT11_PIN); // 等待高电平结束
}
}
// 校验数据
if(buf[4] != (buf[0]+buf[1]+buf[2]+buf[3])) return 2;
*humi = buf[0];
*temp = buf[2];
return 0;
}
经验分享:DHT11对时序要求严格,在实际测试中发现,当系统中断频繁时可能导致读取失败。解决方法是在读取期间临时关闭全局中断,或使用硬件定时器精确控制时序。
3.3.2 转速检测算法实现
转速检测使用定时器输入捕获功能:
-
硬件连接:
- 霍尔传感器输出接PA0(TIM2_CH1)
- 磁铁安装在车轮上,每转触发一次信号
-
配置步骤:
- 初始化TIM2为输入捕获模式
- 设置上升沿触发
- 启用捕获中断
-
转速计算:
- 记录两次触发的时间间隔Δt
- 转速RPM = 60/(Δt×磁铁数量)
- 速度km/h = 车轮周长(m)×RPM×60/1000
c复制// 定时器2输入捕获回调函数
void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim) {
static uint32_t lastCapture = 0;
uint32_t currentCapture;
if(htim->Instance == TIM2) {
currentCapture = HAL_TIM_ReadCapturedValue(htim, TIM_CHANNEL_1);
if(lastCapture != 0) {
uint32_t period = (currentCapture > lastCapture) ?
(currentCapture - lastCapture) :
(0xFFFF - lastCapture + currentCapture);
float rpm = 60.0f / (period * 0.0001f); // 假设定时器10kHz
systemData.bike.cadence = (uint16_t)rpm;
// 计算速度(假设车轮周长2m)
systemData.bike.speed = rpm * 2 * 60 / 1000; // km/h
}
lastCapture = currentCapture;
}
}
3.4 用户界面设计
OLED显示采用分层设计:
-
底层驱动:
- 实现基本点、线、字符绘制
- 提供清屏、刷新等基础功能
-
中间层:
- 数字、字符串格式化显示
- 简单图形绘制(进度条、图表)
-
应用层:
- 运动数据显示界面
- 环境数据显示界面
- 系统设置界面
c复制void Display_Update(void) {
char buffer[20];
// 清屏
OLED_Clear();
// 显示时间
sprintf(buffer, "%02d:%02d:%02d",
systemData.time.Hours,
systemData.time.Minutes,
systemData.time.Seconds);
OLED_ShowString(0, 0, buffer, 16);
// 显示环境数据
sprintf(buffer, "%2dC %2d%%",
systemData.env.temp,
systemData.env.humidity);
OLED_ShowString(80, 0, buffer, 16);
// 运动数据显示
if(systemData.bike.cadence > 0) {
OLED_ShowString(0, 2, "SPEED:", 16);
sprintf(buffer, "%.1f km/h", systemData.bike.speed);
OLED_ShowString(60, 2, buffer, 16);
OLED_ShowString(0, 4, "CADENCE:", 16);
sprintf(buffer, "%3d RPM", systemData.bike.cadence);
OLED_ShowString(60, 4, buffer, 16);
} else {
OLED_ShowString(0, 2, "BIKE STOPPED", 16);
}
// 刷新显示
OLED_Refresh();
}
4. 系统调试与优化
4.1 常见问题与解决方案
在开发过程中遇到的一些典型问题及解决方法:
| 问题现象 | 可能原因 | 解决方案 |
|---|---|---|
| DHT11读取失败 | 时序不准确 | 使用硬件定时器控制时序 |
| 转速检测不准确 | 磁铁安装位置偏差 | 调整磁铁与霍尔传感器间距(5-10mm最佳) |
| OLED显示闪烁 | 刷新频率过高 | 将刷新率控制在30-60Hz |
| 系统偶尔死机 | 堆栈溢出 | 增大启动文件中的堆栈大小 |
| 数据跳变严重 | 电源噪声 | 增加电源滤波电容(100nF+10μF) |
4.2 性能优化技巧
通过以下优化措施,系统性能得到显著提升:
- 传感器数据滤波:
- 采用滑动平均滤波算法
- 窗口大小根据数据类型调整:
- 温度:5点平均
- 转速:3点平均
c复制#define FILTER_SIZE 5
typedef struct {
float buffer[FILTER_SIZE];
uint8_t index;
} Filter_t;
float Filter_AddValue(Filter_t *filter, float value) {
filter->buffer[filter->index] = value;
filter->index = (filter->index + 1) % FILTER_SIZE;
float sum = 0;
for(uint8_t i=0; i<FILTER_SIZE; i++) {
sum += filter->buffer[i];
}
return sum / FILTER_SIZE;
}
-
低功耗设计:
- 无运动时降低采样频率
- 使用STM32的睡眠模式
- 关闭不必要的外设时钟
-
内存优化:
- 使用合适的变量类型(uint8_t代替int)
- 将常量数据存储在Flash中
- 合理使用const和static关键字
4.3 系统测试结果
经过全面测试,系统各项指标如下:
| 测试项目 | 测试条件 | 预期结果 | 实测结果 | 达标情况 |
|---|---|---|---|---|
| 温度测量 | 15-35℃环境 | ±2℃精度 | ±1.5℃ | ✓ |
| 湿度测量 | 20-90%RH | ±5%精度 | ±4% | ✓ |
| 转速检测 | 30-120RPM | ±1RPM | ±0.5RPM | ✓ |
| 刷新率 | 正常操作 | ≥10Hz | 15Hz | ✓ |
| 响应时间 | 按键操作 | <100ms | 50ms | ✓ |
| 连续工作时间 | 满负荷 | ≥8小时 | 10小时 | ✓ |
5. 项目扩展与改进方向
在实际使用中,我发现这个系统还有不少可以改进和扩展的空间:
-
无线数据传输:
- 增加蓝牙模块,将数据同步到手机APP
- 或者添加WiFi模块上传到云端
-
用户识别功能:
- 集成RFID模块,识别不同用户
- 存储个人运动数据
-
进阶运动指标:
- 增加心率监测
- 计算运动负荷和恢复时间
-
能量回收计算:
- 根据发电电流估算产生的电能
- 显示环保贡献值
-
硬件改进:
- 改用STM32H7系列提升处理能力
- 采用IPS LCD提升显示效果
- 增加触摸屏实现交互
这个项目从构思到实现大约花费了3周时间,期间遇到了不少挑战,但也收获了很多嵌入式系统开发的实际经验。特别是在传感器数据采集和实时显示方面,通过这个项目我深入理解了嵌入式系统中时序控制的重要性,以及如何平衡系统性能和功耗。