
1. 独立按键基础与硬件原理
1.1 按键在嵌入式系统中的作用
独立按键作为最基础的人机交互设备,在嵌入式系统中承担着三大核心功能:
-
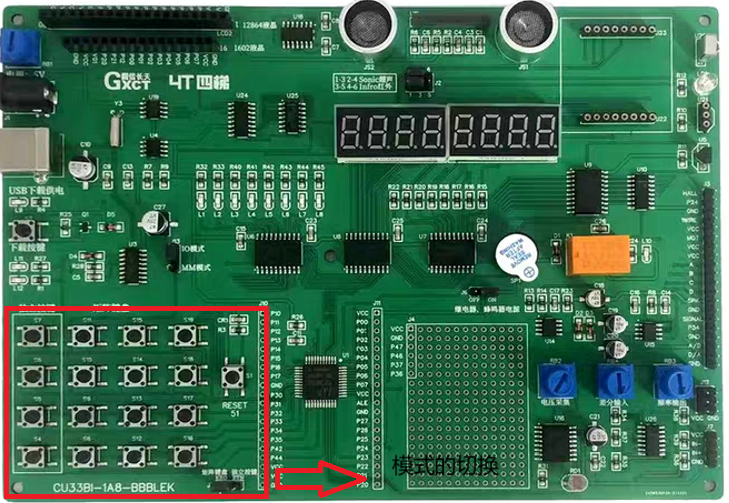
指令输入通道:通过物理按键向MCU发送控制指令,如启动/停止设备、切换功能模式等。在STC15系列中,每个按键都对应一个GPIO引脚(如P3.0-P3.3),通过检测引脚电平变化实现指令识别。
-
参数调节接口:用于系统参数的动态调整。例如在温控系统中,通过"+"、"-"键设置目标温度值。实际应用中通常配合数码管或LCD显示当前参数值。
-
状态切换开关:实现工作模式切换(如自动/手动模式)。典型设计是采用组合键或长按/短按区分不同功能,这需要软件层实现状态机逻辑。
硬件设计要点:按键必须串联10kΩ上拉电阻,确保未按下时引脚稳定在高电平;按键另一端直接接地,按下时产生明确低电平信号。
1.2 机械结构与电气特性
物理结构解析
常见的4引脚轻触按键实际内部是两组导通片(见图1)。当按键按下时,1-2脚和3-4脚分别导通。在PCB布局时,通常只需使用其中一组(如1-2脚),另一组悬空即可。
电气特性参数
- 接触电阻:<100mΩ(按下状态)
- 绝缘电阻:>100MΩ(释放状态)
- 额定电流:50mA
- 机械寿命:10万次以上
1.3 STC15的GPIO内部结构
STC15F2K61S2的P3端口内部结构具有典型性(见图2)。关键部件包括:
- 施密特触发器:对输入信号进行整形,消除毛刺
- 弱上拉电阻:约40kΩ,可软件控制开启/关闭
- 输出驱动电路:推挽输出时驱动能力可达20mA
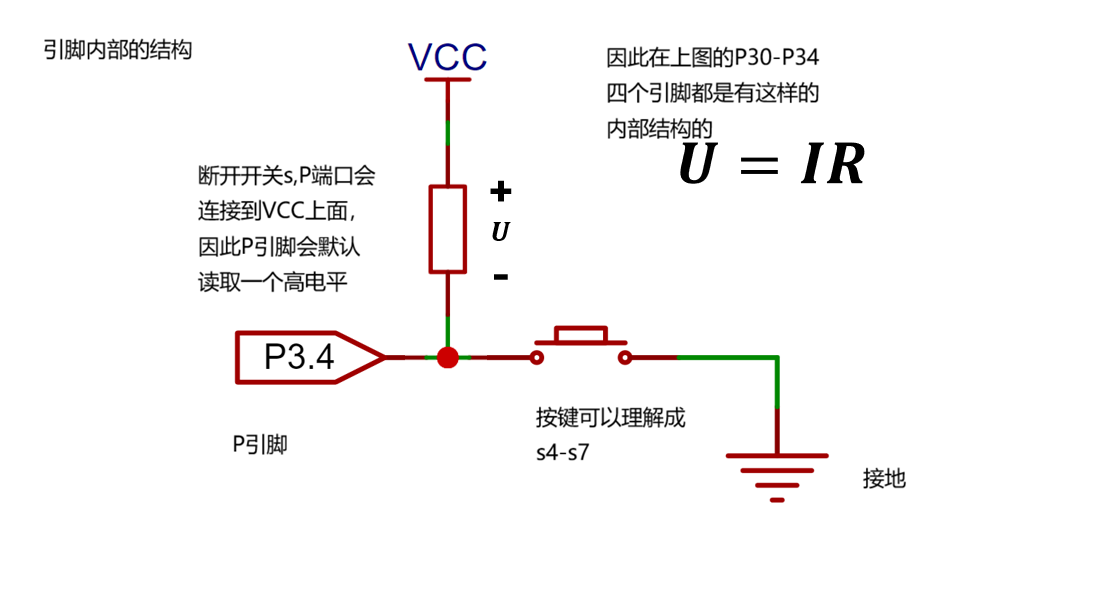
特殊设计:STC15的IO口具有"准双向"模式,上电默认此模式。用作按键输入时,建议保持弱上拉开启(通过PnPU寄存器控制),可省去外部上拉电阻。
2. 按键扫描实现与防抖机制
2.1 硬件电路设计规范
标准独立按键电路应包含以下要素:
- 上拉电阻:取值4.7kΩ-10kΩ,确保高电平稳定
- 滤波电容:在按键两端并联0.1μF电容,吸收触点抖动
- ESD保护:敏感场合可添加TVS二极管,防止静电损坏
典型电路连接方式:
code复制VCC → 10kΩ → P3.3 → 按键 → GND
↑
内部弱上拉(可选)
2.2 软件防抖实现方案
定时扫描法(推荐)
c复制// 每20ms执行一次按键扫描
void Key_Proc(void)
{
static uint8_t count = 0;
if(++count < 20) return;
count = 0;
ucKey_Val = Key_Read_BTN(); // 读取当前键值
}
状态机防抖法
c复制typedef enum {RELEASED, DEBOUNCE, PRESSED} KeyState;
KeyState keyState = RELEASED;
void Key_Scan()
{
switch(keyState) {
case RELEASED:
if(P33 == 0) {
delay_ms(10); // 延时避开抖动期
keyState = DEBOUNCE;
}
break;
case DEBOUNCE:
if(P33 == 0) keyState = PRESSED;
else keyState = RELEASED;
break;
case PRESSED:
if(P33 == 1) keyState = RELEASED;
break;
}
}
防抖时间选择原则
- 机械按键:5-20ms(根据实际测试调整)
- 触摸按键:50-100ms(电容感应需要更长时间稳定)
- 特殊环境(高振动):可延长至50ms
3. STC15按键应用实战
3.1 硬件初始化配置
c复制void Key_Init(void)
{
P3M0 &= 0xF0; // P3.0-P3.3设为准双向模式
P3M1 &= 0xF0;
P3PU |= 0x0F; // 开启P3.0-P3.3上拉电阻
}
关键寄存器说明:
- P3M0/P3M1:模式控制寄存器
- 00:准双向
- 01:推挽输出
- 10:高阻输入
- 11:开漏输出
- P3PU:上拉电阻使能寄存器
- 1:开启对应引脚上拉
- 0:关闭上拉
3.2 按键扫描函数优化
基础版本改进方向:
- 增加连按检测
- 支持长按/短按区分
- 添加按键释放判断
增强版实现:
c复制#define KEY_SHORT_PRESS 1
#define KEY_LONG_PRESS 2
uint8_t Key_Scan_Enhanced(void)
{
static uint8_t key_time = 0;
uint8_t key_val = Key_Read_BTN();
if(key_val) {
if(++key_time > 100) { // 长按判定(100*20ms=2s)
key_time = 0;
return KEY_LONG_PRESS | key_val;
}
} else if(key_time > 0) {
uint8_t ret = (key_time > 3) ? KEY_SHORT_PRESS : 0;
key_time = 0;
return ret | key_val;
}
return 0;
}
3.3 数码管显示联动
按键值与数码管显示的配合要点:
- 数值格式化处理
- 显示刷新同步
- 多级菜单实现
改进显示函数:
c复制void Seg_Display_KeyValue(uint8_t val)
{
char buf[8];
snprintf(buf, sizeof(buf), "K%-2d", val); // 格式化如"K4 "
// 消隐前导零
if(buf[1] == '0') buf[1] = ' ';
Seg_Tran(buf, pucSeg_Code);
}
4. 工程实践问题排查
4.1 常见硬件故障
| 现象 | 可能原因 | 解决方案 |
|---|---|---|
| 按键无反应 | 1. 虚焊 2. 上拉电阻未接 3. 引脚配置错误 |
1. 检查焊点 2. 测量引脚电压 3. 确认GPIO模式 |
| 按键误触发 | 1. 线路干扰 2. 防抖时间不足 3. 电源噪声 |
1. 缩短走线 2. 增加滤波电容 3. 检查电源稳定性 |
| 多键串扰 | 1. 矩阵按键二极管缺失 2. IO口驱动能力不足 |
1. 添加隔离二极管 2. 改用推挽输出模式 |
4.2 软件调试技巧
-
逻辑分析仪抓包:
- 设置采样率1MHz以上
- 同时捕捉按键引脚和定时器信号
- 观察抖动波形实际持续时间
-
printf调试法:
c复制printf("KeyVal=%d, Time=%lu\n", ucKey_Val, ulms);
- 断点设置策略:
- 在Key_Read_BTN()返回处设断点
- 在定时器中断入口设条件断点(uiKey_Dly==20)
4.3 低功耗设计考量
- 睡眠模式唤醒:
c复制PCON |= 0x01; // 进入空闲模式
// 配置按键中断唤醒
P3INT |= 0x0F; // 使能P3.0-P3.3下降沿中断
- 扫描频率自适应:
c复制// 无操作时降低扫描频率
if(ulms - last_active > 5000) {
scan_interval = 100; // 改为100ms扫描
} else {
scan_interval = 20;
}
5. 进阶应用实例
5.1 组合键实现
c复制uint8_t Key_Read_Combo(void)
{
uint8_t val = Key_Read_BTN();
static uint8_t last_val = 0;
static uint32_t last_time = 0;
if(val && last_val && (ulms - last_time < 50)) {
return (val << 4) | last_val; // 返回组合键码
}
last_val = val;
last_time = ulms;
return val;
}
5.2 按键配置存储
利用STC15的EEPROM保存按键参数:
c复制void Key_SaveConfig(uint8_t key, uint8_t func)
{
IAP_EraseSector(0x2000); // 擦除EEPROM扇区
IAP_WriteByte(0x2000 + key, func); // 存储键值映射
IAP_Disable(); // 关闭EEPROM操作
}
5.3 触摸按键扩展
通过电容检测实现触摸按键:
c复制uint8_t Touch_Key_Scan(void)
{
P3M0 = 0x08; P3M1 = 0x00; // P3.3推挽输出
P33 = 1; delay_us(10); // 充电
P3M0 = 0x00; P3M1 = 0x00; // 改为输入模式
uint8_t time = 0;
while(P33 && time<100) time++; // 检测放电时间
return (time > THRESHOLD) ? 1 : 0;
}
在STC15F2K61S2上实际测试发现,机械按键的抖动时间与按键质量密切相关。廉价按键的抖动可能达到15-20ms,而优质欧姆龙按键通常抖动在5ms内。因此防抖延时建议通过实验确定:用示波器捕捉按键波形,测量从按下到稳定的时间,再取1.5倍余量作为防抖延时。