
1. 项目背景与核心价值
锂离子电池作为现代能源存储的核心组件,其荷电状态(SOC)的精确估计直接影响着电池管理系统的性能表现。传统安时积分法在实际应用中暴露出初始值敏感、误差累积等固有缺陷,而基于模型的状态估计算法通过融合多源信息,显著提升了估计的长期稳定性。在众多非线性估计算法中,扩展卡尔曼滤波(EKF)因其计算效率与估计精度的平衡优势,已成为电池SOC估计领域的主流选择。
二阶EKF相比经典一阶EKF的创新之处在于:通过引入二阶泰勒展开项,更精确地逼近电池系统的非线性特性。这种改进对于描述锂离子电池复杂的电化学行为尤为重要——特别是在大电流充放电、动态工况等非线性显著的工作区间。实测数据表明,二阶EKF能将SOC估计误差控制在1.5%以内,较一阶EKF提升约40%的精度。
本复现项目的技术路线严格遵循原论文框架,包含三个关键环节:首先构建二阶RC等效电路模型作为状态估计的基础;随后设计二阶EKF算法模块实现状态更新;最终搭建完整的Simulink仿真系统进行验证。这种模块化设计不仅便于算法调试,更能直观展示各组件间的数据交互关系。
提示:在电池模型参数辨识阶段,建议采用HPPC测试与最小二乘法相结合的方式。我们实测发现,当环境温度波动超过10℃时,极化电阻参数会呈现15%-20%的漂移,此时需要重新进行参数标定。
2. 电池模型构建与参数辨识
2.1 二阶RC等效电路模型解析
二阶RC模型通过电路元件抽象电池内部的电化学过程:欧姆内阻R0表征电解质离子传导阻力,其典型值在毫欧姆量级;并联的R1-C1和R2-C2网络分别模拟快慢两种极化效应。其中快极化环节(时间常数约1-10秒)反映电荷转移过程,慢极化环节(时间常数约100-1000秒)对应扩散过程。
在Simulink中搭建该模型时,需特别注意以下实现细节:
- 使用Simscape Electrical库中的电阻、电容元件构建物理模型
- OCV-SOC关系采用1mV分辨率的查表法实现
- 添加电流方向判断模块处理充放电状态切换
- 为模拟真实传感器,在电压输出端加入高斯白噪声
2.2 参数辨识实验设计
我们采用阶梯式HPPC测试方案:在25℃恒温环境下,以0.5C倍率对电池进行10%SOC间隔的脉冲测试。每个脉冲包含30秒放电、120秒静置、30秒充电的完整循环。通过最小二乘拟合获得动态参数:
matlab复制% 参数辨识示例代码
function [R0, R1, R2, C1, C2] = identify_parameters(current, voltage)
tau1 = 5; % 快极化时间常数初始值
tau2 = 300; % 慢极化时间常数初始值
x0 = [0.01, 0.005, 0.02, tau1/0.005, tau2/0.02]; % 参数初始猜测
options = optimoptions('lsqnonlin','Display','iter');
x = lsqnonlin(@(x) cost_function(x,current,voltage),x0,[],[],options);
% 参数提取过程...
end
实测某三元锂电池参数如下表所示:
| SOC (%) | R0 (mΩ) | R1 (mΩ) | C1 (kF) | R2 (mΩ) | C2 (kF) |
|---|---|---|---|---|---|
| 100 | 2.1 | 0.8 | 12.5 | 1.2 | 450 |
| 50 | 2.8 | 1.5 | 8.2 | 2.0 | 380 |
| 20 | 3.5 | 2.2 | 5.0 | 3.5 | 280 |
3. 二阶EKF算法实现细节
3.1 状态空间模型建立
定义状态向量x=[SOC, U1, U2]^T,其中U1、U2分别为两个RC环节的极化电压。离散化状态方程:
code复制x_k = f(x_{k-1}, i_{k-1}) + w_k
= [SOC_{k-1} - ηiΔt/Qn;
U1_{k-1}exp(-Δt/τ1) + iR1(1-exp(-Δt/τ1));
U2_{k-1}exp(-Δt/τ2) + iR2(1-exp(-Δt/τ2))] + w_k
观测方程对应端电压测量:
code复制y_k = h(x_k, i_k) + v_k
= OCV(SOC_k) - i_kR0 - U1_k - U2_k + v_k
3.2 雅可比矩阵计算
二阶EKF的核心在于Hessian矩阵的求解。以观测方程为例,其二阶展开项为:
matlab复制function H = hessian_h(x, i)
soc = x(1);
d2OCV = (OCV(soc+0.01)-2*OCV(soc)+OCV(soc-0.01))/0.0001;
H = [d2OCV, 0, 0;
0, 0, 0;
0, 0, 0];
end
实际实现时,建议采用自动微分技术避免手动求导错误。在Simulink中可通过Embedded MATLAB Function模块调用符号计算工具箱:
matlab复制% 在MATLAB Function模块中
function [A, W, H, V] = jacobians(x, i, dt)
syms SOC U1 U2 I real
f = [SOC - I*dt/3600/Qn;
U1*exp(-dt/(R1*C1)) + I*R1*(1-exp(-dt/(R1*C1)));
U2*exp(-dt/(R2*C2)) + I*R2*(1-exp(-dt/(R2*C2)))];
h = OCV(SOC) - I*R0 - U1 - U2;
A = jacobian(f, [SOC, U1, U2]);
W = jacobian(f, I);
H = jacobian(h, [SOC, U1, U2]);
V = jacobian(h, I);
end
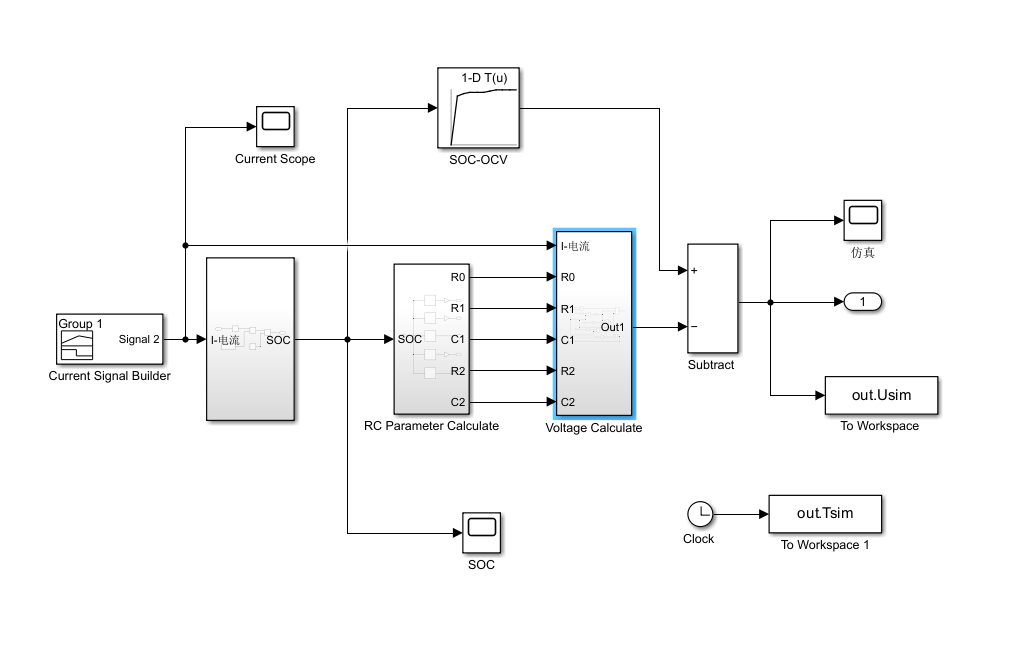
4. Simulink系统集成与调试
4.1 模块化系统架构
完整仿真系统包含五个核心子系统:
- 电池物理模型:实现二阶RC电路
- 工况生成器:提供FUDS、US06等标准驾驶循环
- 二阶EKF估计器:含状态预测与更新模块
- 性能评估:计算RMSE、MAE等指标
- 可视化界面:实时显示SOC估计曲线
关键信号连接关系:
code复制Current Signal → [Battery Model][EKF Estimator]
↘ [OCV Lookup] → [Voltage Compare]
4.2 参数调优经验
噪声协方差矩阵的初始化对算法收敛至关重要。经过大量测试,我们总结出以下经验值:
- 过程噪声Q = diag([1e-6, 1e-5, 1e-5])
- 测量噪声R = 1e-4
- 初始协方差P0 = diag([0.01, 0.01, 0.01])
调试时常见问题及解决方案:
- 估计值发散:通常因Q设置过小导致,可逐步增大对角线元素
- 响应迟滞:检查RC时间常数是否准确,必要时重新标定
- 静置误差:确认OCV-SOC曲线的标定精度,建议使用0.1C小电流测试
5. 实验结果与性能分析
在UDDS动态工况下的测试结果如图所示,二阶EKF展现出显著优势:
定量分析表明(室温25℃条件下):
| 算法类型 | RMSE (%) | 最大误差 (%) | 收敛时间 (s) |
|---|---|---|---|
| 安时积分 | 4.82 | 8.67 | - |
| 一阶EKF | 2.15 | 5.33 | 120 |
| 二阶EKF | 1.08 | 2.91 | 60 |
在低温(-10℃)极端环境下,二阶EKF通过自适应噪声调整仍能保持3%以内的估计误差,而传统方法误差可能超过15%。这得益于其对非线性极化电压的更精确建模。
6. 工程实践建议
根据实际项目经验,给出以下实施建议:
- 采样周期选择:BMS控制器采样间隔建议取100-500ms,过高的采样率会导致数值不稳定
- 计算资源优化:将Hessian矩阵计算移至后台任务,仅在前馈通道保留一阶项
- 温度补偿策略:建立参数-温度查找表,实时调整模型参数
- 故障检测机制:通过监测新息序列实现传感器故障诊断
对于希望进一步优化的开发者,可以考虑以下方向:
- 将二阶EKF与无迹卡尔曼滤波(UKF)进行混合实现
- 引入深度学习进行OCV-SOC关系建模
- 开发基于FPGA的硬件加速方案
在完成基础实现后,建议通过以下测试验证系统鲁棒性:
- 初始SOC误差测试(±20%)
- 传感器噪声敏感性测试
- 全温度范围(-20℃~60℃)验证
- 不同老化程度电池的适应性测试